



分享资料个
针对在复杂系统中实现自组织参数的PID控制问题,介绍了一种基于模糊控制原理的PID参数自组织控制器的设计方案, 同时利用MATLAB中的SIMULINK和FUZZY工具箱进行了仿真研究,仿真结果表明,参数自组织模糊控制系统比参数固定的系统的控制效果好。
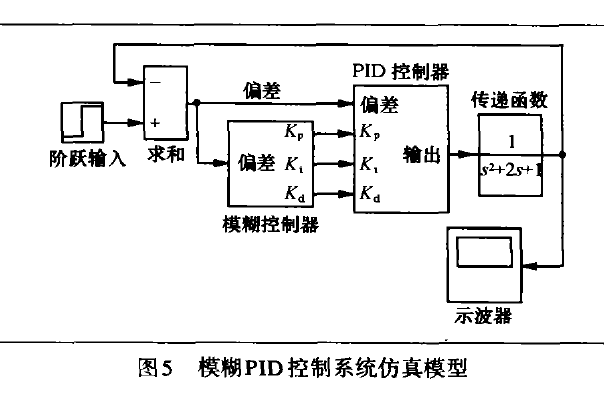
根据偏差的比例(P)、积分(I)、微分(D )进行控制(简称PID控制),是控制系统中应用最为广泛的一种控制规律。但是,要想取得好的控制效果,必须离线或者在线整定PID控制器的参数,使之具有合理的数值 实际上,任何一个有效的控制设计都需要包含人的经验知识、判断技巧和直觉推理能力。基于这一想法,本文根据模糊控制原理,设计了一种参数自组织PID控制器,试图把人的判断技巧与推理能力参与到控制系统设计中去。该控制方案既对PID算法加以保留和改进,又运用模糊控制原理在线整定PID控制器的参数。这样得到的控制系统在理论上具有超调小、稳态控制精度高等特点。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
