

电子说
步骤1:硬件连接
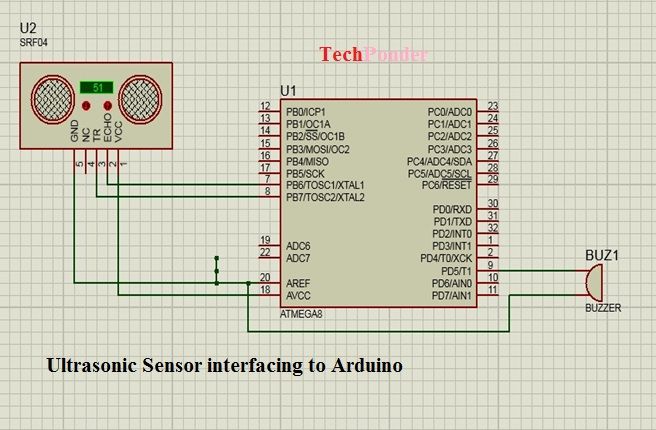
硬件连接:-
Arduino超声波传感器
5v-》 Vcc
gnd-》 Gnd
第8针-》 Trig针
第7针-》回声针
Arduino蜂鸣器
第9针-》 + ve针
Gnd-》 -ve针
步骤2:程序和结果
//超声波传感器与Arduino的接口。
int蜂鸣器= 9;
int triggerPin = 7;//触发引脚7
int echoPin = 8;//回显引脚8
void setup()
{
Serial.begin(9600);//我们将开始串行通信,因此我们可以在串行监视器Serial.println(“ Tech Ponder‘s UltraSonic Sensor Tutorial”)上看到距离。
pinMode(triggerPin,OUTPUT);//定义引脚
pinMode(echoPin,INPUT);
pinMode(蜂鸣器,输出);
digitalWrite(蜂鸣器,LOW); }
void loop()
{int duration,distance;//添加持续时间和距离
digitalWrite(triggerPin,HIGH);//触发波浪(例如使LED闪烁)
delay(10);
digitalWrite(triggerPin,LOW);
duration = pulseIn(echoPin,HIGH);//侦听和等待波浪的特殊功能
distance =(duration/2)/29.1;//将数字转换为cm(如果要英寸,则必须用合适的数字更改29.1
delay(1000);
Serial.print(distance);//打印数字
Serial.print(“ cm”);//和单位
Serial.println(“”);//仅打印到新行
if(距离《35)
{
digitalWrite(buzzer,HIGH);
Serial.println(“ Buzzer On”);
}
digitalWrite(buzzer,LOW);
}
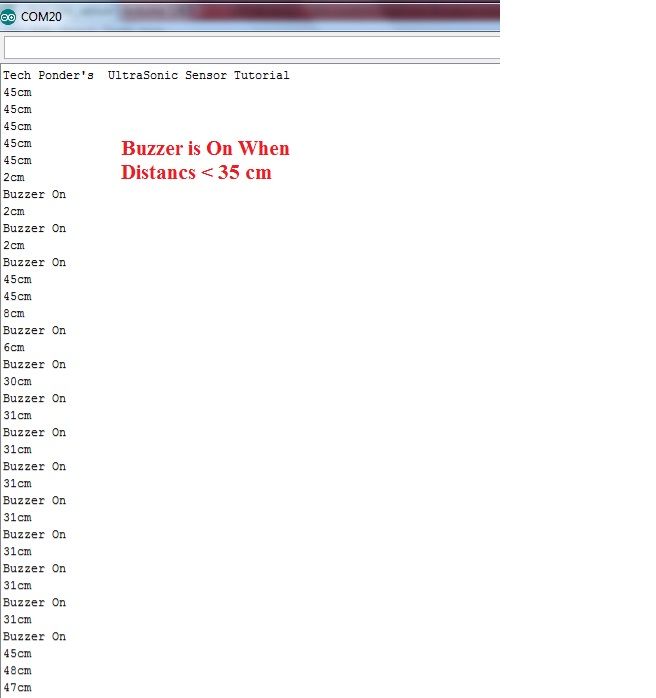
结果显示在串行监视器上。
Arduino每隔一秒钟就使用超声波传感器计算距离。当距离小于35厘米时,arduino会检测到阈值并且蜂鸣器打开,可用作障碍物检测器。当障碍物靠近距离小于35厘米时,它将发出警报。用户。
全部0条评论

快来发表一下你的评论吧 !

