



分享资料个
全国大学生智能汽车竞赛是一个涉及控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的科技创意性比赛。经过几个月的努力,我们使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体公司的16 位微控制器MC9S12DG128B 单片机作为核心控制单元,自主构思控制方案进行系统设计,完成了智能车的制作和调试。
飞思卡尔智能车比赛的赛道,由白色泡沫材料及其中心的黑色引导线组成,对赛道信息捕获的效果好坏,直接决定着智能车的速度及控制性能。通常采用的路径检测方式,不外乎CCD 与光电两种。CCD 方案具有先天的优势,不仅能得到前方赛道的丰富信息,而且可实现远距离的前瞻,对车模重量及稳定性的影响也很小;而光电方案受传感器数量、车模重量及稳定性所限,获得的赛道信息十分有限,前瞻距离也不足,使得使用光电管方案的队伍成绩普遍不如使用CCD方案的队伍。
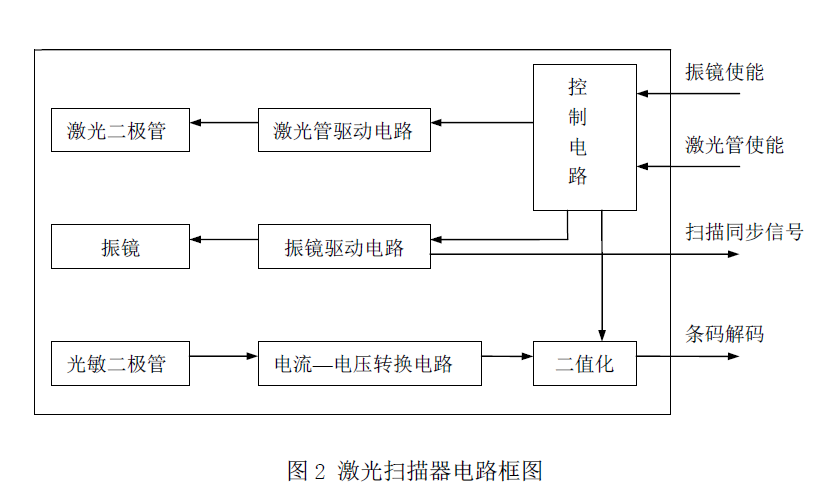
为得到大前瞻、连续性好的信息,我们在赛车中使用了激光扫描器,它利用快速摆动(或旋转)的镜面,反射能量高度集中的激光束,使激光束的出射角度随着反射镜的运动产生连续的变化,从而投射出一条扫描线。虽然只有一个光电检测器和一个光源,但由于反射镜的高扫描频率,使得扫描器几乎可以同时得到一行的图像信息。而控制算法中,速度控制采取分区间不同速度控制,舵机采取简单的PD 控制
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉


全部0条评论

快来发表一下你的评论吧 !
