

伺服与控制
步进电机只能够由数字信号控制运行的,当脉冲提供给驱动器时,在过于短的时间里,控制系统发出的脉冲数太多,也就是脉冲频率过高,将导致步进电机堵转。要解决这个问题,必须采用加减速的办法。就是说,在步进电机起步时,要给逐渐升高的脉冲频率,减速时的脉冲频率需要逐渐减低。这就是我们常说的“加减速”方法。
所以步进电机在高速启动时,需要采用脉冲频率升速的方法,在停止时也要有降速过程,以保证实现步进电机精密定位控制。加速和减速的原理是一样的。
以加速实例加以说明:加速过程是由基础频率(低于步进电机的直接起动最高频率)与跳变频率(逐渐加快的频率)组成加速曲线(降速过程反之)。跳变频率是指步进电机在基础频率上逐渐提高的频率,此频率不能太大,否则会产生堵转和丢步。
指数曲线,在软件编程中,先算好时间常数存贮在计算机存贮器内,工作时指向选取。通常,完成步进电机的加减速时间为300ms以上。如果使用过于短的加减速时间,对绝大多数步进电机来说,就会难以实现步进电机的高速旋转。
步进电机的使用大致分为位置控制和速度控制。而速度控制的速度范围可由低速到高速变速控制或恒速度使用,但均存在速度变化问题。下图表示速度变化率的定义。
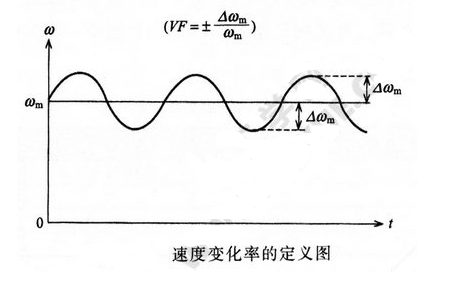
现在,步进电机的平均速度以ωm表示,其速度变化由零至最大值,如以△ωm转动,速度变化率VF用下式来定义:
这是速度变化率的测量,按实际的负载惯量用等效惯量或摩擦转矩等测量,以接近实际使用值。特别是惯量大时,速度变化率(也称为速度失效或抖动、摆动等)也大。因此必须注意步进电机的速度运行范围,速度愈快,速度变化率愈小。
此种测量方法大致分为使用编码器的方法和激光测量方法。使用编码器时,应注意编码器与步进电机的联轴器的轴中心要同心,还要考虑编码器惯量的影响。速度变化率的计算,首先要对编码器单位时间的脉冲数逐一计数,然后再计算速度变化率。而使用激光测量方法,要在步进电机上安装圆盘,该圆盘反射激光束,将光反射回去,速度变化用多普勒效应计算,此设备在市面有售。此处如非特别要求使用编码器测量,最好使用激光测量仪。
全部0条评论

快来发表一下你的评论吧 !

