

测量仪表
1 引言
伴随着微电子技术的发展,机载设备的自动化程度、综合化水平和技术密度程度不断提高,同时也使机载设备的测试系统及维修设备的研究受到高度重视。国外发达国家都先后制定了适应本国要求的维修系统与维修设备的设计、类型选择及模块化、系列化标准,其主要目的是要以较低的测试成本、较短的研制周期、先进的测试技术和便于灵活组合的软硬件结构,建立通用化、系列化和标准化的维修测试平台,以适应多个测试对象、多种测试环境和技术不断发展的要求,这种维修测试平台称作自动测试设备(ATE,Automatic Testing Equipment)。
本文介绍的航向姿态系统自动测试设备正是基于ATE技术的自动测试设备,对某型飞行器机载航姿系统各部件进行离位测试,完成部件的功能性能检测、维护校准和故障诊断。主要被测单元(UUT,Unit Under Test)包括磁传感器、磁航向修正计算器、航向位置指示器、领航指示器、全姿态组合陀螺、综合放大器、控制盒等。
2 自动测试设备硬件设计
2.1自动测试设备组成及测试原理
自动测试设备组成及测试原理如图1所示,各部分功能如下、:
(1)测试系统采用GPIB总线和VXI总线混合模式。其中VXI总线为系统总线,负责全系统的数据和测量命令的传递。系统总线连到中心计算机上,中心计算机管理全系统的检测和故障诊断过程。
(2)VXI总线机箱是一个局部测量单元,主要负责高速数据采集、多路数据切换和专用信号的测量与模拟等。
(3)基于GPIB总线的数字测量仪器负责VXI机箱测量功能以外的来自UUT的信号测量,多功能信号发生器产生UUT测试中所需的信号,这些设备都是可编程数字测量仪器。
(4)基于GPIB总线的程控电源包括程控直流电源和程控交流电源,提供所有UUT独立工作时需要的直流电和交流电。
(5)信号转接中枢是信号连接机构,采用ICA(系统阵列接口)结构形式,负责完成VXI机箱、程控电源、信号发生器、数字测量仪器与UUT之间的信号中转工作。
(6)接口适配器是UUT与测试系统之间的的连接机构,其任务是将各个UUT专属信号转接成公共接口信号,并通过与ICA的连接输送到测试系统。接口适配器是信号预处理电路,与UUT密切相关。
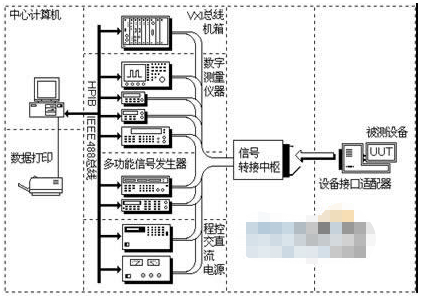
图1 测试系统组成及测试原理
2.2 测试资源组成和结构
根据航姿系统被测单元的测试需求分析配置自动测试资源。资源组成配置见表1。
表1 资源组成表

系统资源采用组合箱式连接方式,便于运输、转场。
2.3 测试适配器和电缆设计
测试适配器主要由UUT信号接口部分、信号转换与处理部分、阵列接口部分组成,如图2所示。
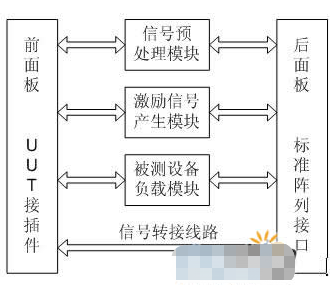
图2 适配器组成示意图
UUT信号接口部分主要包括安装在适配器前面板上的接插件,完成测试系统与UUT的物理信号连接。
信号转换与处理部分包括激励信号产生模块、信号预处理电路模块、被测设备负载电路、信号转接线路等。激励信号产生模块产生部分特殊测试激励信号,信号预处理模块对被测信号进行预处理,以适应仪器测量,被测设备负载电路用于为被测设备提供必要的负载,以构成一个完整的测试环路。
阵列接口部分采用国际航空领域通用的ARINC608A标准接口,主要完成测试适配器与被测航姿设备的信号交联,完成检测系统对被测设备进行实时监控和自动检测。
UUT与测试适配器的连接采用测试电缆连接方式,电缆两端的连接器应保证与适配器以及UUT的连接器配套,保证准确可靠连接;导线应根据信号特点选用合适导线类型、截面积、长度、是否屏蔽等。
3 自动测试设备软件设计
3.1 软件的层次结构
测试软件由格式化类测试资源驱动程序、测试运行平台程序、测试程序集等组成。格式化类测试资源驱动程序是一组面向各仪器类(数字多用表、开关类、电源类等),封装了测试资源的VISA驱动功能,提高测试资源可互换性。测试运行平台程序主要完成测试资源配置、初始化、测试程序运行支持、故障诊断、测试和故障诊断数据的存储、浏览与打印等一系列工作;测试程序主要完成对所有被测设备的控制、测试资源控制、测试结果数据的处理与显示以及整个测试过程的控制与管理等,软件层次结构如图3所示[3]。
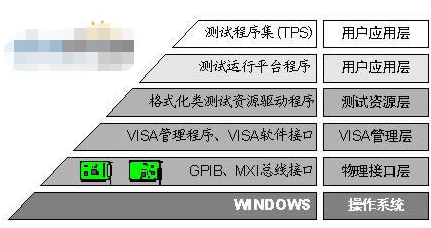
图3 软件层次结构
3.2 测试程序设计
测试程序采用美国NI公司的虚拟仪器图形化开发工具LabWindows/CVI8.0,采用ANSI C语言编程。
测试程序分功能测试和维修测试两种运行模式。对于功能测试,测试程序给出各被测单元的功能测试项目清单供操作员任意选择。程序自动控制测试资源按照测试逻辑完成UUT的功能测试,测试数据可以作为UUT故障诊断的输入数据。若需要和操作员交互则弹出对话框或虚拟仪器面板便于操作员参与设备交互,对需要操作员参与设备交互的设备采用虚拟仪器面板交互测试。对于维修测试,操作员通过虚拟仪器面板直接操作测试资源,完成UUT的维修测试。一般先运行功能测试,若出现故障则运行故障诊断程序隔离定位故障,然后进行维修测试帮助维修,维修完成后再运行功能测试验证UUT功能完好与否。
3.3 故障诊断程序设计
采用测试和故障诊断分开的模式。测试程序完成UUT功能测试项目并将测试结果数据输出产生测试结果记录文件;故障诊断程序对故障诊断数据源-UUT测试结果记录文件进行分析,并结合故障字典完成对UUT的故障诊断及故障定位。测试程序的输出即为故障诊断程序的输入。故障字典是描述测试项目与SRU故障关联特性的特征向量的集合,是“故障诊断程序”进行故障判断、故障定位及故障隔离的依据。故障字典由设计人员根据UUT的工作原理、测试项目与SRU故障的关联特性等总结、推理出表征各SRU故障的特征向量,最后各特征向量的集合就形成了UUT的故障字典。故障词典以数据库文件形式存在供故障诊断程序调用[5]。
4 结论
航向姿态系统自动测试设备是一套总线式机载设备地面自动检测系统,系统采用国际先进的开放式ATE系统结构以及阵列接口、VXI和GPIB总线接口、程控仪器、虚拟仪器控制和先进的测试软件等技术,完成了航向姿态系统的功能测试、故障诊断和维修,提高了航向姿态系统的测试维修能力。
系统采用图形化测试界面和虚拟仪器控制技术,为用户提供了直观简捷的检测工作界面,使用鼠标即可完成检测操作。该系统交付用户使用,经过两年多的使用证明,系统工作可靠,使用方便,测试精度高,工作效率高。
责任编辑:gt
全部0条评论

快来发表一下你的评论吧 !

