

电子说
一、ZYNQ基本结构
ZYNQ7000系列分为 Artix-7 Kintex-7 Virtex-7,各个型号区别参考下面的博文
https://www.jianshu.com/p/005899fe6815
二、ZYNQ7020 分为PS端、PL端
PS: 处理系统 (Processing System) , 就是与 FPGA 无关的 ARM 的 SOC 的部分。
PL: 可编程逻辑 (Progarmmable Logic), 就是 FPGA 部分。
ZYNQ7020的整体架构如下图所示
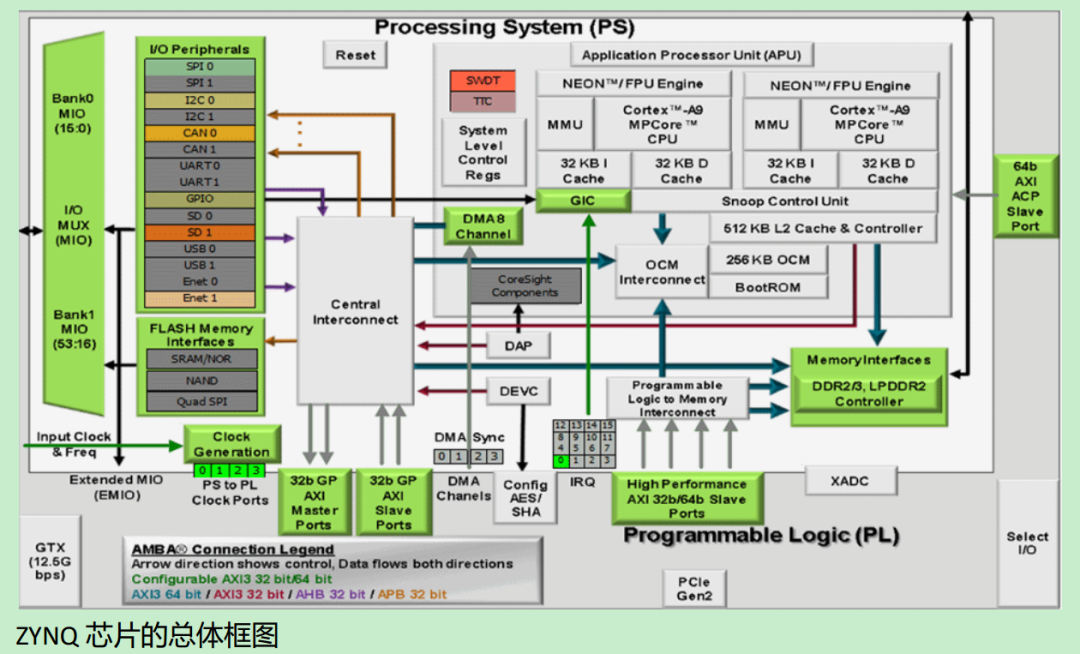
Zynq 就是两大功能块,PS 部分和 PL 部分, 说白了,就是 ARM 的 SOC 部分,和 FPGA部分。其中,PS 集成了两个 ARM Cortex-A9 处理器,AMBA互连,内部存储器,外部储器接口和外设。这些外设主要包括 USB 总线接口,以太网接口,SD/SDIO 接口,I2C 总线接口,CAN 总线接口,UART 接口,GPIO 等。
三、PS 和 PL 互联技术
3.1、ZYNQ 作为首款将高性能 ARM Cortex-A9 系列处理器与高性能 FPGA 在单芯片内紧密结合的产品,为了实现 ARM 处理器和 FPGA 之间的高速通信和数据交互
3.2、发挥 ARM 处理器和 FPGA的性能优势,需要设计高效的片内高性能处理器与 FPGA 之间的互联通路。 本节,我们就将主要介绍 PS 和 PL 的连接,让用户了解 PS 和 PL 之间连接的技术。
3.3、在具体设计中我们往往不需要在连接这个地方做太多工作,我们加入 IP 核以后, 系统会自动使用 AXI 接口将我们的 IP 核与处理器连接起来,我们只需要再做一点补充就可以了。
AXI 全称 Advanced eXtensible Interface,是 Xilinx 从 6 系列的 FPGA 开始引入的一个接口协议,主要描述了主设备和从设备之间的数据传输方式。在 ZYNQ 中继续使用,版本是 AXI4,所以我们经常会看到 AXI4.0,ZYNQ 内部设备都有 AXI 接口。
3.4、其实 AXI 就是 ARM 公司提出的AMBA(Advanced Microcontroller Bus Architecture)的一个部分,是一种高性能、高带宽、低延迟的片内总线,也用来替代以前的 AHB 和 APB 总线。
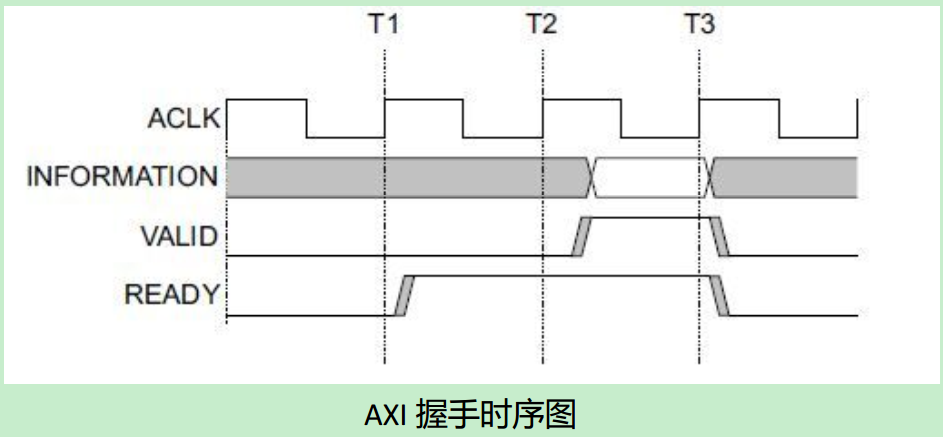
AXI 协议主要描述了主设备和从设备之间的数据传输方式,主设备和从设备之间通过握手信号建立连接。当从设备准备好接收数据时,会发出 READY 信号。当主设备的数据准备好时,会发出和维持 VALID 信号,表示数据有效。数据只有在 VALID 和 READY 信号都有效的时候才开始传输。当这两个信号持续保持有效,主设备会继续传输下一个数据。
3.5、主设备可以撤销VALID 信号,或者从设备撤销 READY 信号终止传输。AXI 的协议如图,T2 时,从设备的 READY信号有效,T3 时主设备的 VILID 信号有效,数据传输开始。
信号有效,T3 时主设备的 VILID 信号有效,数据传输开始。
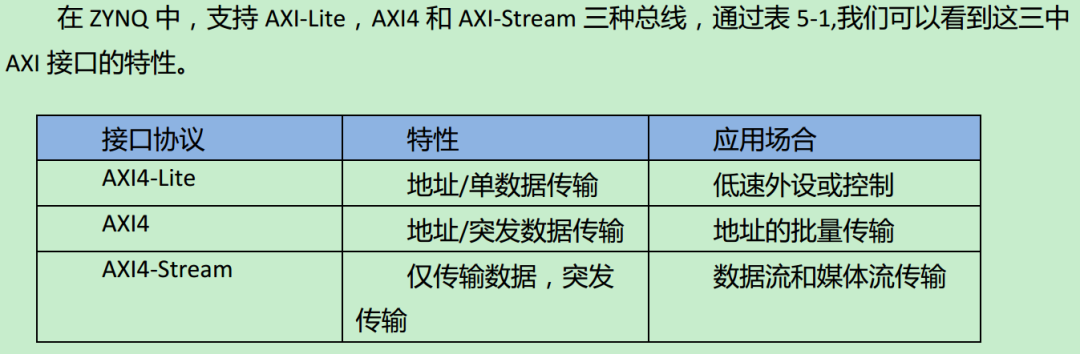
四、ZYNQ 芯片内部用硬件实现了 AXI 总线协议,包括 9 个物理接口,分别为 AXI-GP0~AXIGP3,AXI-HP0~AXI-HP3,AXI-ACP 接口。
1、AXI_ACP 接口,是 ARM 多核架构下定义的一种接口,中文翻译为加速器一致性端口,用来管理 DMA 之类的不带缓存的 AXI 外设,PS 端是 Slave 接口。2、AXI_HP 接口,是高性能/带宽的 AXI3.0 标准的接口,总共有四个,PL 模块作为主设备连接。主要用于 PL 访问 PS 上的存储器(DDR 和 On-Chip RAM)3、AXI_GP 接口,是通用的 AXI 接口,总共有四个,包括两个 32 位主设备接口和两个 32 位从设备接口
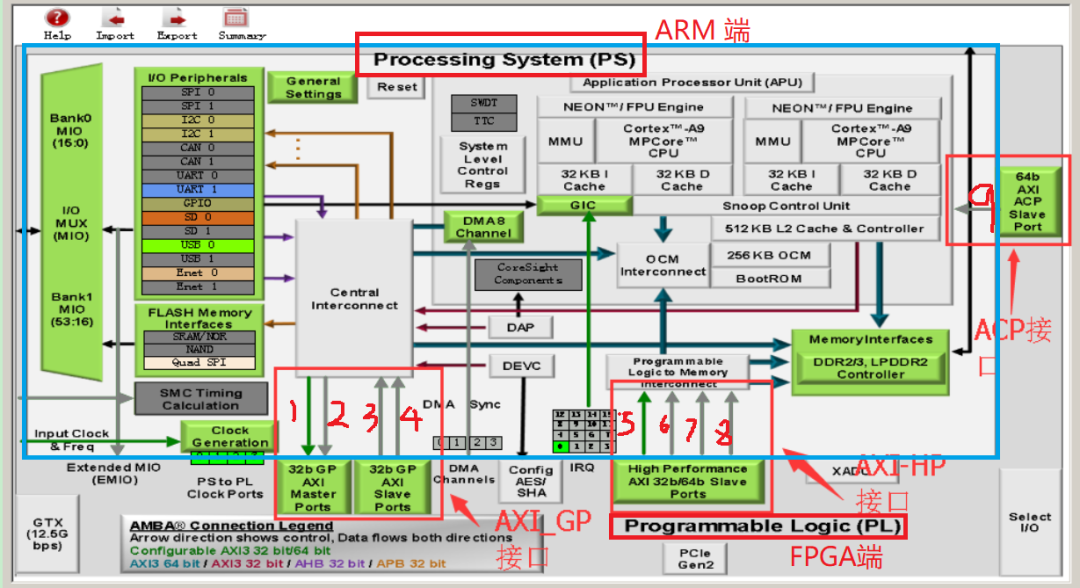
可以看到,ARM只有两个 AXI-GP 是 Master Port,即主机接口,其余 7 个口都是 Slave Port(从机接口)。主机接口具有发起读写的权限,ARM 可以利用两个 AXI-GP 主机接口主动访问 PL 逻辑,其实就是把 PL 映射到某个地址,读写 PL 寄存器如同在读写自己的存储器。其余从机接口就属于被动接口,接受来自 PL 的读写,逆来顺受。
4.1、这 9 个 AXI 接口性能也是不同的。GP 接口是 32 位的低性能接口,理论带宽600MB/s,而 HP 和 ACP 接口为 64 位高性能接口,理论带宽 1200MB/s。
4.2、有人会问,为什么高性能接口不做成主机接口呢?这样可以由 ARM 发起高速数据传输。答案是高性能接口根本不需要 ARM CPU 来负责数据搬移,真正的搬运工是位于 PL 中的 DMA 控制器。
4.3、位于 PS 端的 ARM 直接有硬件支持 AXI 接口,而 PL 则需要使用逻辑实现相应的 AXI 协议。Xilinx 在 Vivado 开发环境里提供现成 IP 如 AXI-DMA,AXI-GPIO,AXI-Dataover, AXI-Stream 都实现了相应的接口,使用时直接从 Vivado 的 IP 列表中添加即可实现相应的功能。下图为 Vivado 下的各种 DMA IP:
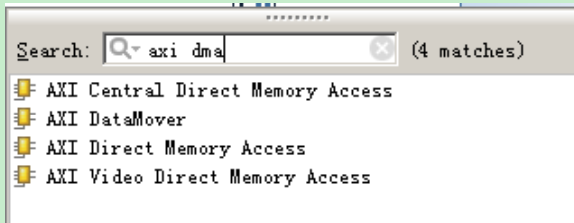
下面为几个常用的 AXI 接口 IP 的功能介绍:
AXI-DMA:实现从 PS 内存到 PL 高速传输高速通道 AXI-HP<---->AXI-Stream 的转换AXI-FIFO-MM2S:实现从 PS 内存到 PL 通用传输通道 AXI-GP<----->AXI-Stream 的转换AXI-Datamover:实现从 PS 内存到 PL 高速传输高速通道 AXI-HP<---->AXI-Stream 的转换,只不过这次是完全由 PL 控制的,PS 是完全被动的。AXI-VDMA:实现从 PS 内存到 PL 高速传输高速通道 AXI-HP<---->AXI-Stream 的转换,只不过是专门针对视频、图像等二维数据的。AXI-CDMA:这个是由 PL 完成的将数据从内存的一个位置搬移到另一个位置,无需 CPU 来插手。
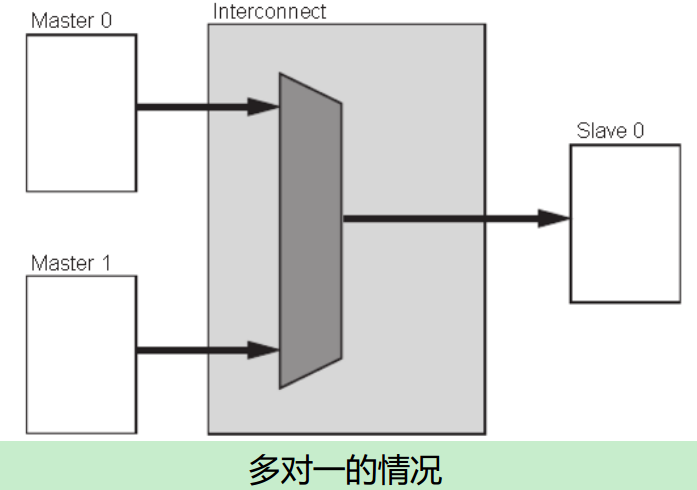
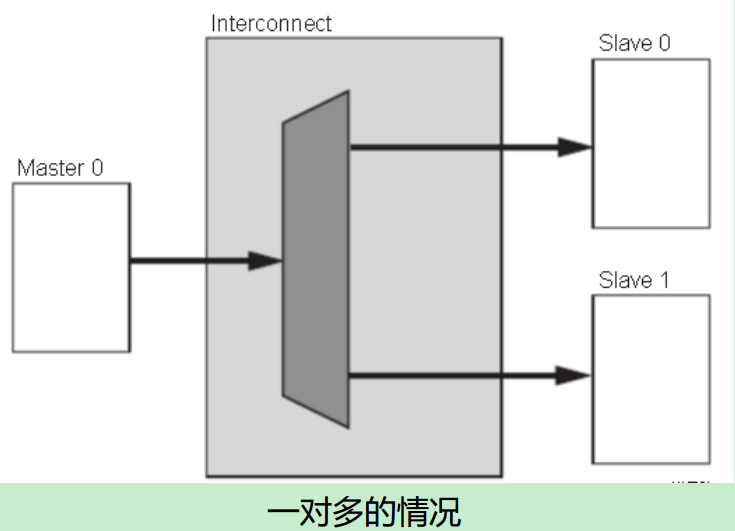
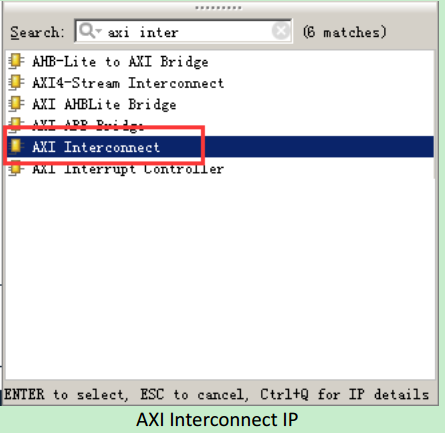
4.4、AXI 协议严格的讲是一个点对点的主从接口协议,当多个外设需要互相交互数据时,我们需要加入一个 AXI Interconnect 模块,也就是 AXI 互联矩阵,
4.5、作用是提供将一个或多个 AXI 主设备连接到一个或多个 AXI 从设备的一种交换机制(有点类似于交换机里面的交换矩阵)。
4.6、这个 AXI Interconnect IP 核最多可以支持 16 个主设备、 16 个从设备,如果需要更多的接口,可以多加入几个 IP 核。
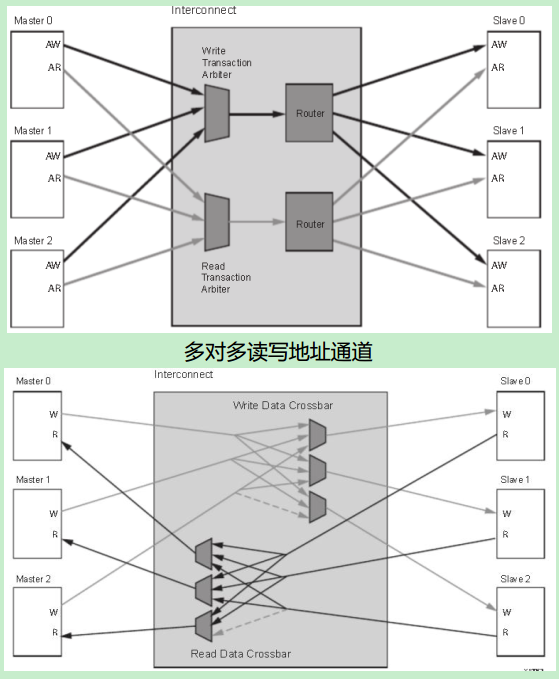
AXI Interconnect 基本连接模式有以下几种: N-to-1 Interconnect to-N Interconnect N-to-M Interconnect (Crossbar Mode) N-to-M Interconnect (Shared Access Mode)
五、内部链接
ZYNQ 内部的 AXI 接口设备就是通过互联矩阵的的方式互联起来的,既保证了传输数据的高效性,又保证了连接的灵活性。
Xilinx 在 Vivado 里我们提供了实现这种互联矩阵的 IP 核axi_interconnect,我们只要调用就可以。
六、引脚分配
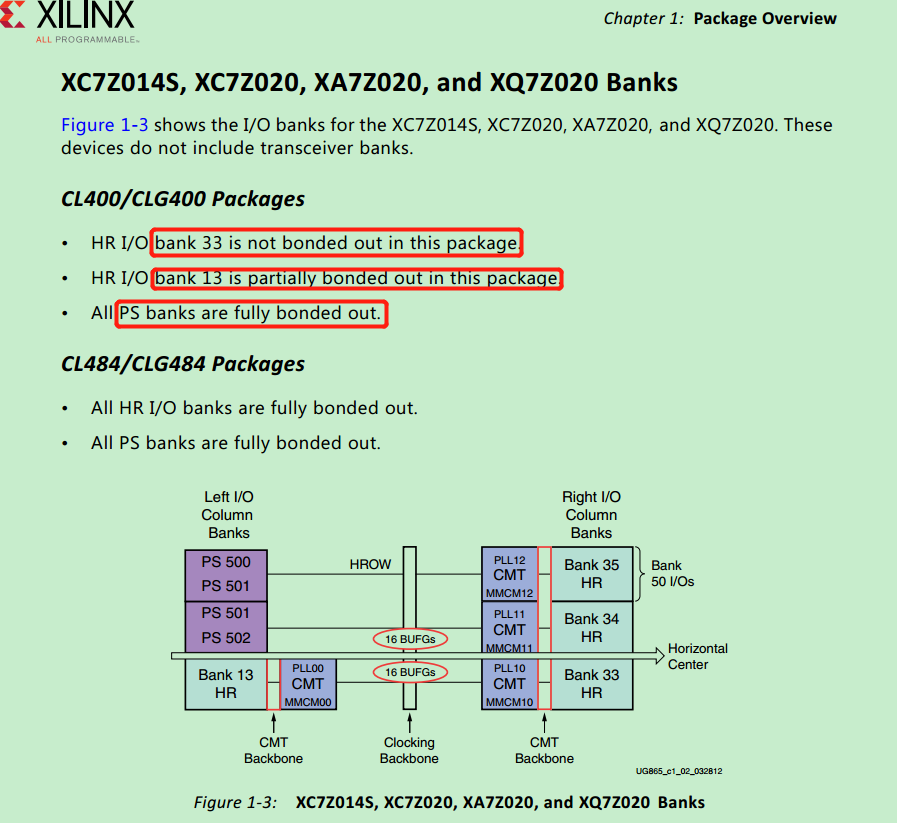
ZYNQ7020是400脚封装,从官网的文档,可以看出ZYNQ7020的引脚分配
PS端的引脚包括BANK500、BANK501、BANK502、
PL端引脚包括 BANK13(部分包含)BANK35、BANK34
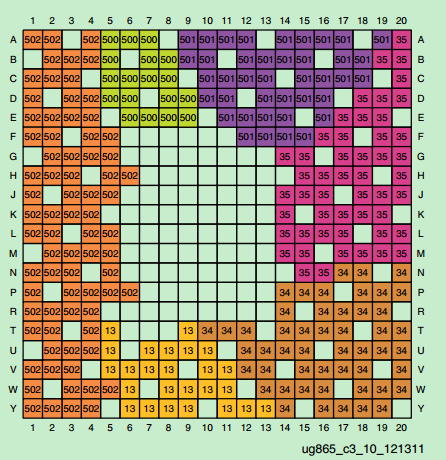
下面这张图,更加形象
七、上面的部分,并没有把引脚讲的很清楚,这里看官方手册,有如下描述
意思是,PS端的引脚数量是固定的,并且不能分配给PL端使用,最多有54个引脚可以连接到PS端,
他们可以软件编程连接ps的内部外设或者静态内存控制器
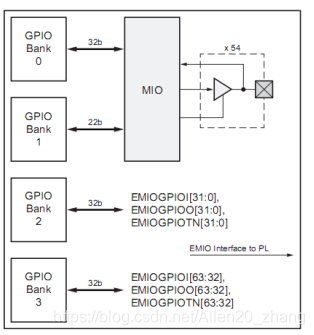
八、MIO概述
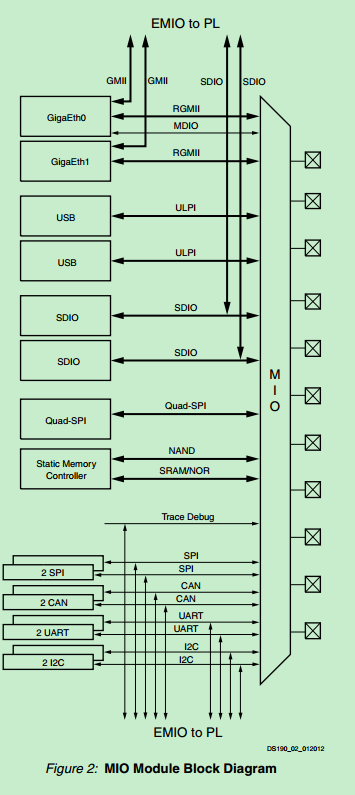
MIO的功能是将从PS外设和静态内存接口的访问,复用到配置寄存器中定义的PS引脚。在PS端最多有54针被用以IOP(I/O Peripheral )和静态内存接口下表4显示了可以映射不同外设引脚的位置。图2显示了MIO模块的框图。如果超过了54个引脚个数的其它I/O功能是设计必须的,那他可以通过PL端,路由到与这些功能相关联的I/O引脚这个特性被称为可扩展多路复用I/O (EMIO)。

九、MIO、EMIO和AXI_GPIO的关系
ZYNQ7000中与PS相连的引脚包含MIO、EMIO和AXI_GPIO三种类型。
1、MIO直接挂在PS上,而EMIO与PL相连,PS通过PL调用EMIO。MIO共有54bit,EMIO共有64bit。
MIO管脚是固定的,而EMIO需要通过管脚约束文件进行分配。MIO、EMIO管脚号均通过实际原理图查找。
2、AXI_GPIO是通过AXI总线挂在PS上的GPIO,一般通过调用IP核实现,如PS通过AXI_Uartlite调用PL端资源。
而EMIO在Block Design文件上表现为PS上的一个引出接口。
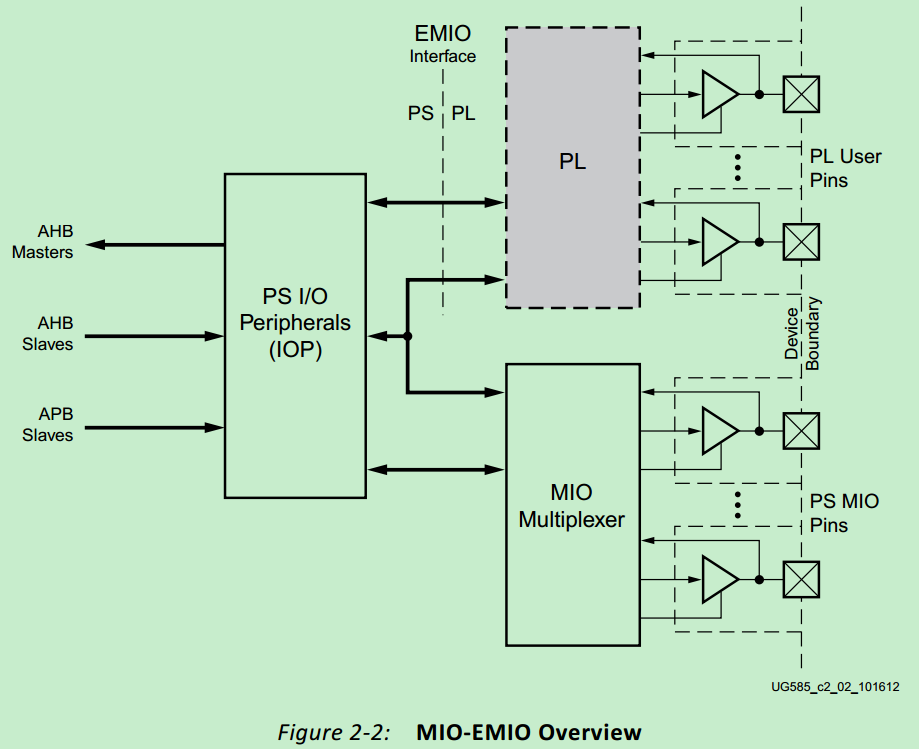
十、PS-PL MIO-EMIO信号和接口
由于MIO引脚的数量有限,MIO是I/O外围连接的基础。可以软件编程IO信号路由到MIO引脚。也可以通过EMIO接口将I/O外围信号路由到PL端,
这非常有用,用来PS获得更多的设备引脚(PL端引脚),或者允许一个PS端外设的一个引脚路由到PL的内部IP逻辑端口,如图2
十一、启动流程
12.1、启动模式
Boot 模式3种启动模式可以使用:• PS Master Non-secure Boot• PS Master Secure Boot• JTAG/PJTAG Boot
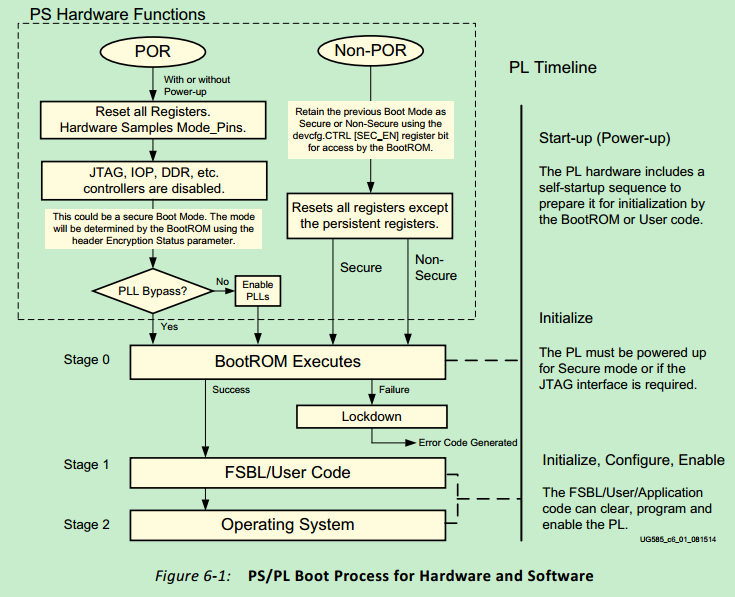
12.2、启动阶段
Zynq-7000 AP SoC 支持安全和非安全启动处理,启动分3个阶段 • Stage-0 Boot (BootROM) • First Stage Bootloader • Second Stage Bootloader (Optional)
12.3、阶段0:Stage-0 Boot (BootROM)
12.4、阶段1:FSBL(First Stage Bootloader )
FSBL(第一阶段引导加载程序)在BootROM之后启动,这个BootROM将FSBL加载到OCM(On-Chip Memory ),
FSBL负责下面的几项工作
1、初始化PS端的配置数据(使用xilinx硬件配置工具提供的)2、用bitstream文件烧写PL端3、加载第二阶段BootLoader或者逻辑代码到DDR内存4、却换到第二阶段BootLoader或者逻辑代码运行
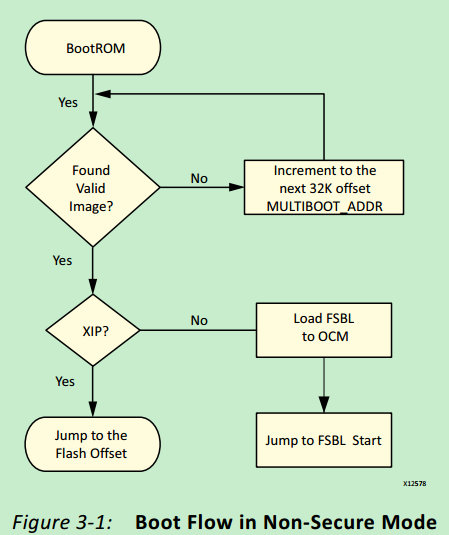
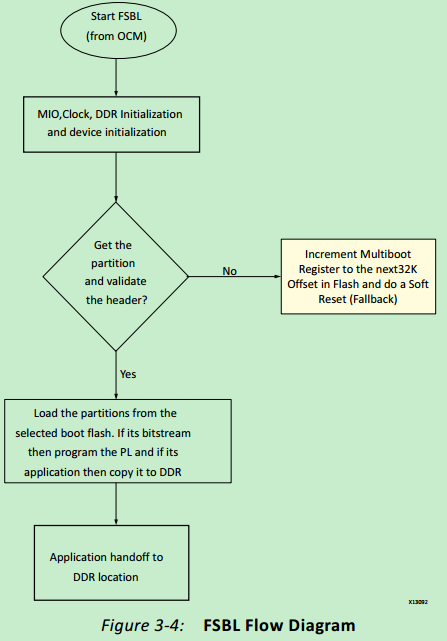
FSBL流程图
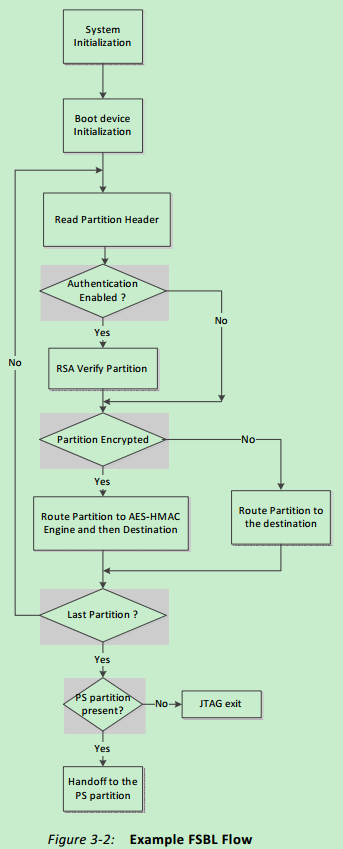
下图是一个简单的FSBL流程图:
12.5、第二阶段启动流程:Second Stage Bootloader
第二阶段引导加载程序是可选的,并由用户设计。
Zynq-7000 AP SoC BootROM加载程序需要引导映像头,它加载单个分区,通常是FSBL。引导映像的其余部分由FSBL加载和处理。
xilinx提供了一个名为Bootgen的实用程序(用来创建一个适合ROM或Fash的引导映像)。它通过构建所需的引导头、
附加描述以下分区的表并将输入数据文件(ELF文件、FPGA bit流和其他二进制文件)处理到分区来创建映像。
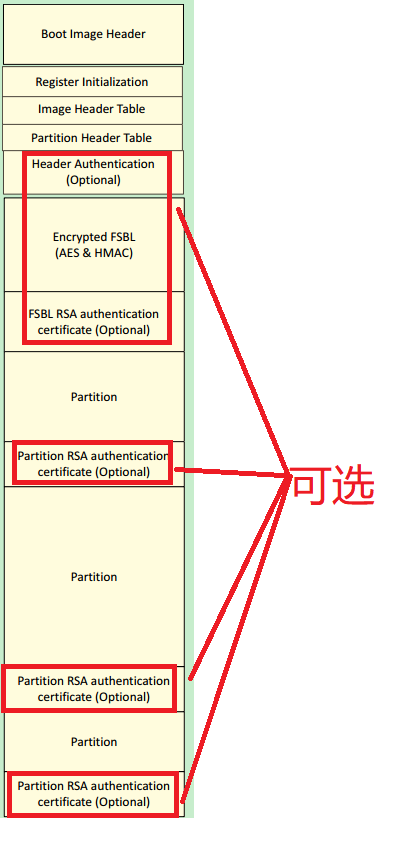
12.6、Boot Image 格式
Boot镜像格式包含下面几个方面 • BootROM header • FSBL image • One or more partition images • Unused space, if available
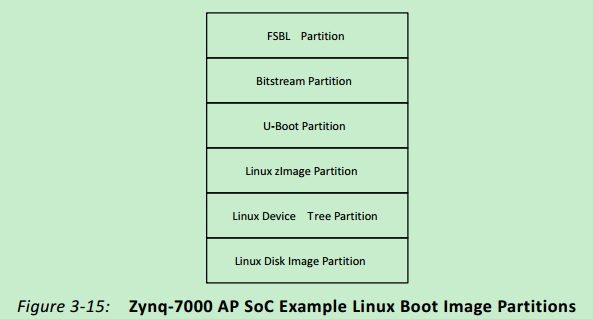
12.7、下图显示了Zynq-7000 AP SoC Linux引导映像分区的示例。
编辑:jq
全部0条评论

快来发表一下你的评论吧 !

