

电子说
摘要:为了提高农田精准管理效率,基于无人机(Unmaned Aerial Vehicle,UAV )实时获取和传输的遥感数据设计了一种快速监测农田土壤水分的方法:首先,利用 UAV 飞行采集农田的多光谱数据,在农田选取一个代表性的重点观测区域进行随机样点土壤水分探测;然后,利用垂直干旱指数(Perpendicular Drougth Index,PDI),结合样点土壤水分数据快速构建农田土壤水分反演模型,进而获得大范围的农田土壤水分监测结果. 并通过6个时相获取的UAV数据和样点土壤水分数据,进行方法实验和模型精度分析,结果表明利用该方法进行农田土壤水分监测的精度较高:6个时相土壤水分反演结果的决定系数 R2均在 0.8 以上,其中5个时相的均方根误差RMSE和系统误差SE值均小于0.1. 这证明了基于UAV数据设计的农田土壤水分监测方法的有效性和可行性,可以为大范围农田土壤水分的快速监测提供方法参考。
土壤水分表示一定深度土层中土壤的干湿程度,是气候、生态、水文和农学等研究领域的一个基础参数[1]. 在农业生产中,农田的土壤水分是旱涝指示因子,是农作物旱情判断及灌溉管理的基础指 标,也是影响农作物的生长发育的重要因素,更是影响精准农业发展的关键因素[2]. 因此,全面、实时和准确的农田土壤水分监测,对农作物长势的科学认识、精准灌溉技术的实施和农作物产量的评估都有重要的现实意义.
土壤水分监测方法主要有传统的土壤水分测定方法和遥感监测方法. 传统的土壤水分测定方法是基于手工的单点测定,尽管具有测定精度高和操作简单的优点,但数据时效性差,且单点土壤水分信息不能代表区域土壤水分情况,难以满足大范围、实时的土壤水分监测需求[3-4] .遥感技术的发展,给土壤水分的实时、动态、宏观监测提供了新思路,一定程度上弥补了传统测定方法的不足. 遥感手段获取土壤水分是基于土壤表面的遥感数据,通过研究遥感数据与土壤水分的关系,建立土壤水分与遥感数据的关系模型来反演土壤水分信息[5-6] . 目前利用遥感技术反演土壤水分主要用到的遥感波段有:可见光-近红外、热红外和微波. 学者们基于这些遥感波段得到了许多模型和方法,如作物缺水指数(Crop Water Stress Index,CW-SI)法[7-8]、水分亏缺指数(Water Deficit Index,WDI)法[9]、植被供水指数(Vegetation Supply Water Index,VSWI)法[10]、微波法[11-12]等. 其中,可见光-近红外遥感监测土壤水分方法根据土壤反射率会随着土壤水分增加而降低的特征,通过构建光谱指数与土壤水分之间的关系模型进而反演土壤水分. 基于近红外和红光(NIR-Red)对水分的吸收特性,GHULAM等[13]提出了垂直干旱指数 (Perpendicular Drought Index,PDI ),能有效探测土壤水分变化趋势,简单易用且物理意义明确,常应用于不同地区土壤水分的监测[14-16].目前的遥感方法可以实现对土壤水分的大面积监测,但仍存在时效性较差、精度较低的问题. 无人机(Unmaned Aerial Vehicle,UAV )可以实时获取和传输高分辨率的遥感数据,UAV 遥感可以弥补目前的遥感方法监测土壤水分时效性差的不足,为作物土壤水分监测提供了新的技术和思路. 近年来,基于UAV遥感的土壤水分监测方法得到了广泛的研究,如:张智韬等[17]利用 UAV数据对裸土含水率进行大范围快速测定并确定了最佳土壤监测深度;陈震等[18]利用UAV影像进行作物土壤水分亏缺反演研究,构建了土壤水分反演模型;葛翔宇等[19]提出 了一种基于UAV遥感快速监测土壤水分的新方案.当前,UAV 遥感监测土壤水分的方法和相关模型正在不断地完善,如何利用UAV 数据进行准确、快速、大范围的土壤水分监测是未来研究中的重点和难点.本文旨在探索一种基于UAV遥感的农田土壤水分监测方法:利用实时获取的UAV多光谱数据,构建农田土壤水分反演模型,从而实现大范围农田土壤水分的快速监测,为农作物合理灌溉、农业精准化管理提供参考。
1 研究区域
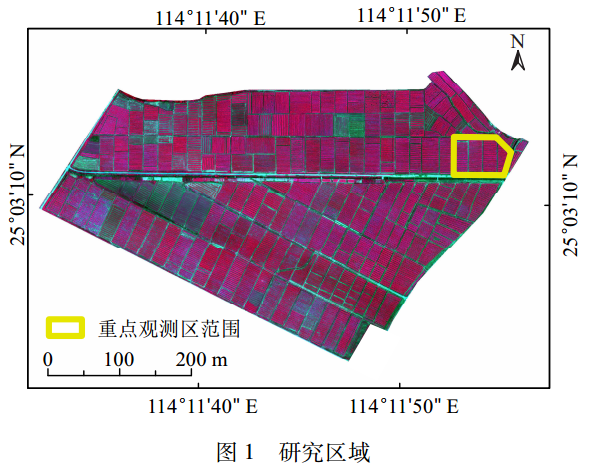
研究区域是位于广东省韶关市始兴县东北部的特色烟叶种植农田 (中心经纬度:114°11‘44’’E,25°03‘10’‘N),如图 1 所示. 该农田总面积约为16.67hm2,田间作物种植统一有序,田埂排列整齐. 作物的生长期为每年的 3—6 月份,图 1 是2019年5月12日获取的农田范围的多光谱影像. 由于研究区面积较大,为了快速建立农田土壤水分反演模型,本研究在农田中选取了一块面积为0.38hm2 的重点观测区(农田东北部的黄色矩形区域),用于实地探测田间样点的土壤水分.
2 数据与方法
2.1 数据采集
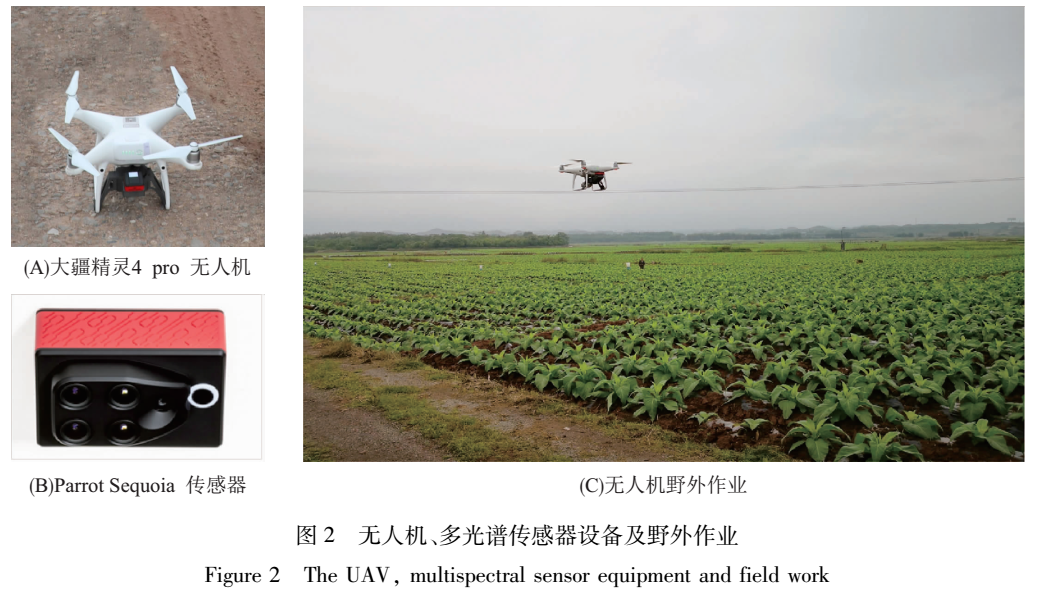
数据采集包括UAV多光谱数据获取与田间样点的土壤水分探测. UAV数据的获取采用大疆精灵4proUAV 信息采集系统,搭载Parrot Sequoia 传感器作为遥感数据采集平台,飞行设备及野外调研照片如图2所示. Parrot Sequoia 传感器由多光谱传感器和光照传感器两部分组成,其获取的多光谱影像共有4个光谱通道:绿光Green ( 波长550nm,带宽40nm)、红光Red(波长660nm,带宽 40nm )、红边 Red_edge(波长75nm ,带宽10nm )和近红外NIR(波长 790nm,带宽40nm ). 本研究在作物生长期内一共飞行采集了6个时相的覆盖整块农田的UAV多光谱影像(具体时间见表 1),UAV飞行高度均为 80m, UAV 多光谱影像空间分辨率为0.1m ,数据质量良好.
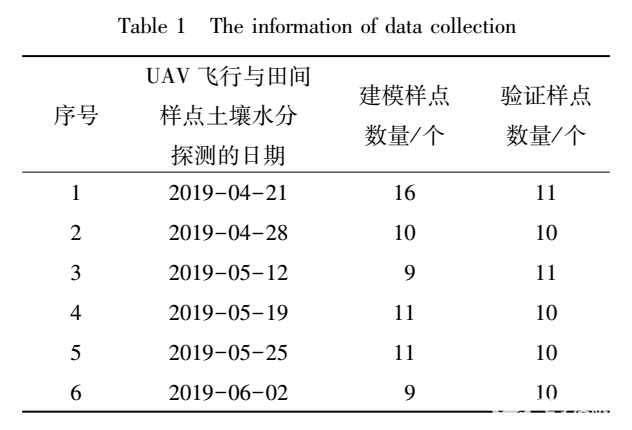
为了快速建立农田土壤水分反演模型,每次飞行采集 UAV多光谱数据完成后,均在重点观测区随机选取若干个建模样点,并进行土壤水分探测;最后,在农田其他区域也选取若干个验证样点并进行土壤水分探测,用于检验反演模型的精度水平,详细信息见表 1. 田间样点的土壤水分采用Decagon公司生产的ECH2O/EC-5土壤湿度监测仪进行单点测定,该仪器的探针插入土壤中,通过计算土壤中电解质的质量分数来估算单位土壤容积中水 分子所占的比例,则可快速探测出样点的土壤体积含水率(Volumetric Water Content,VWC),仪器的测量偏差值为±0.03. 每个样点最终记录的 VWC值均是通过连续3探测所取的平均值(VWC 值越大,代表土壤水分越高),每次探测时长为 3~ 4s,探测土壤深度为0~ 10cm.
2.2 土壤水分监测方法
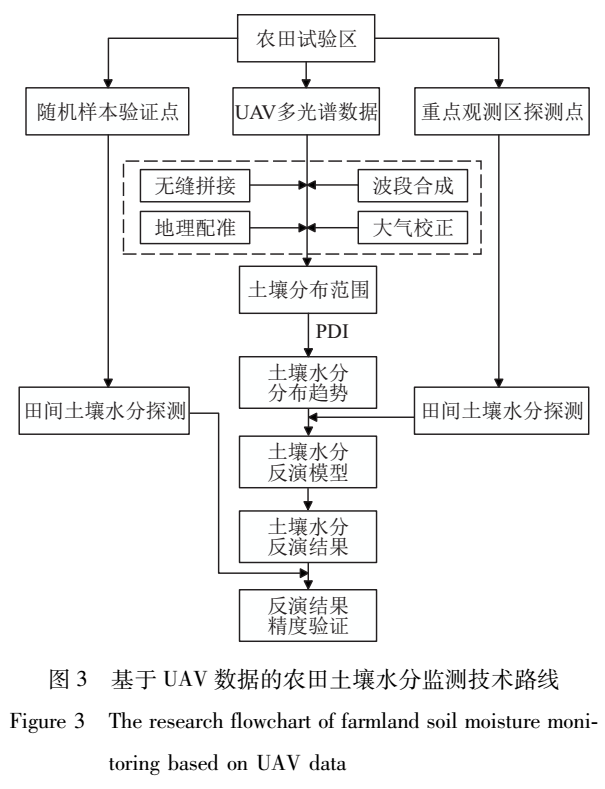
本文利用 UAV 多光谱数据和垂直干旱指数(PDI),设计了一种快速监测农田土壤水分的方法,并通过6个时相获取的 UAV 数据进行方法实验. 技术流程如图 3 所示,具体方法介绍如下:(1)通过搭载在 UAV 的多光谱相机获取覆盖整块农田的多光谱数据,并对数据进行拼接、配准、校正等预处理;(2)计算归一化植被指数( NDVI),从而得到植被覆盖(作物)范围,对植被覆盖范围进行掩膜处理,得到农田的土壤分布范围;(3) 计算农田土壤范围的PDI,得到整块农田土壤水分分布趋势;(4) 在整块农田中选定一个重点观测区,并在重点观测区随机选取建模样点探测土壤水分,即得到建模样点的VWC 值;(5)构建PDI与 VWC值的关系模型,即得 到农田土壤水分反演模型;(6) 计算整块农田的VWC 值,得到整块农田的土壤水分反演结果;(7)在整块农田中(重点观测区除外) 随机选取验证样点进行土壤水分探测,对土壤水分反演结果进行精度验证.
下面将对本方法所用的归一化植被指数、垂直干旱指数和精度验证指标进行详细介绍.
2.2.1 归一化植被指数 NDVI 在计算 PDI之前需要剔除植被像元对土壤水分计算的影响,本文利用归一化植被指数( NDVI)[20] 得到植被覆盖范围,并对植被覆盖范围进行掩膜处理. NDVI计算公式
如下:

2.2.2 垂直干旱指数 PDI土壤在红波段 Red和近红外波段 NIR 的反射率具有线性关系,在 NIR-Red光谱特征空间中,土壤的光谱变化表现为一个由近于原点发射的直线,称为“ 土壤基线” [21],可以表示为:

其中,Rred、Rnir分别是红光、近红外波段的反射率,M、I分别为土壤基线的斜率、截距.
GHULAM 等[13]利用了土壤在NIR-Red 光谱特征空间的特性,建立了垂直干旱指数(PDI),可以有效地探测土壤水分. 其计算公式如下:

在NIR-Red二维散点图中,PDI 构成垂直于土壤基线的法线. 在NIR-Red 光谱特征空间上,从任何一个点到该法线的垂直距离可以说明土壤的干湿程度,距离越大则说明土壤越干旱,越小则说明土壤越湿润,即 PDI 值越大表示土壤水分越低,反之土壤水分越高.
2.2.3 精度验证指标
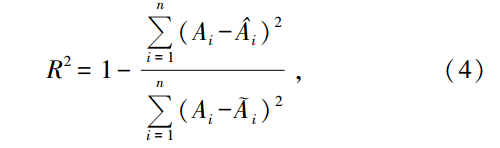
精度验证分别采用决定系数 R2、均方根误差(Root Mean Square Error,RMSE)和系统误差(Systematic Error,SE)3个指标来分析.R2可以用来度量2个变量之间的回归拟合效果,计算公式如下:
其中,

为估算值,Ai为实测值,

为所有实测值的均值;n为样本数量;R2值介于0和1 之间,R2值越接近1,表示2个变量的回归拟合效果越好 .
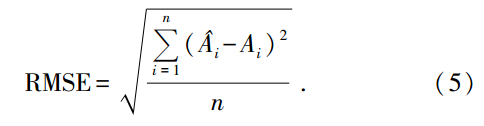
RMSE用来评价所有检验样本的整体估算误差,计算公式如下:
SE用来评价系统误差的影响(如高估、低估),计算公式如下:
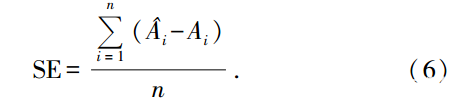
RMSE和 SE值越小,代表模型的估算精度越高. 其中SE值大于0表示结果被高估,反之则表示被低估.
3 结果与分析
3.1 土壤水分的反演模型
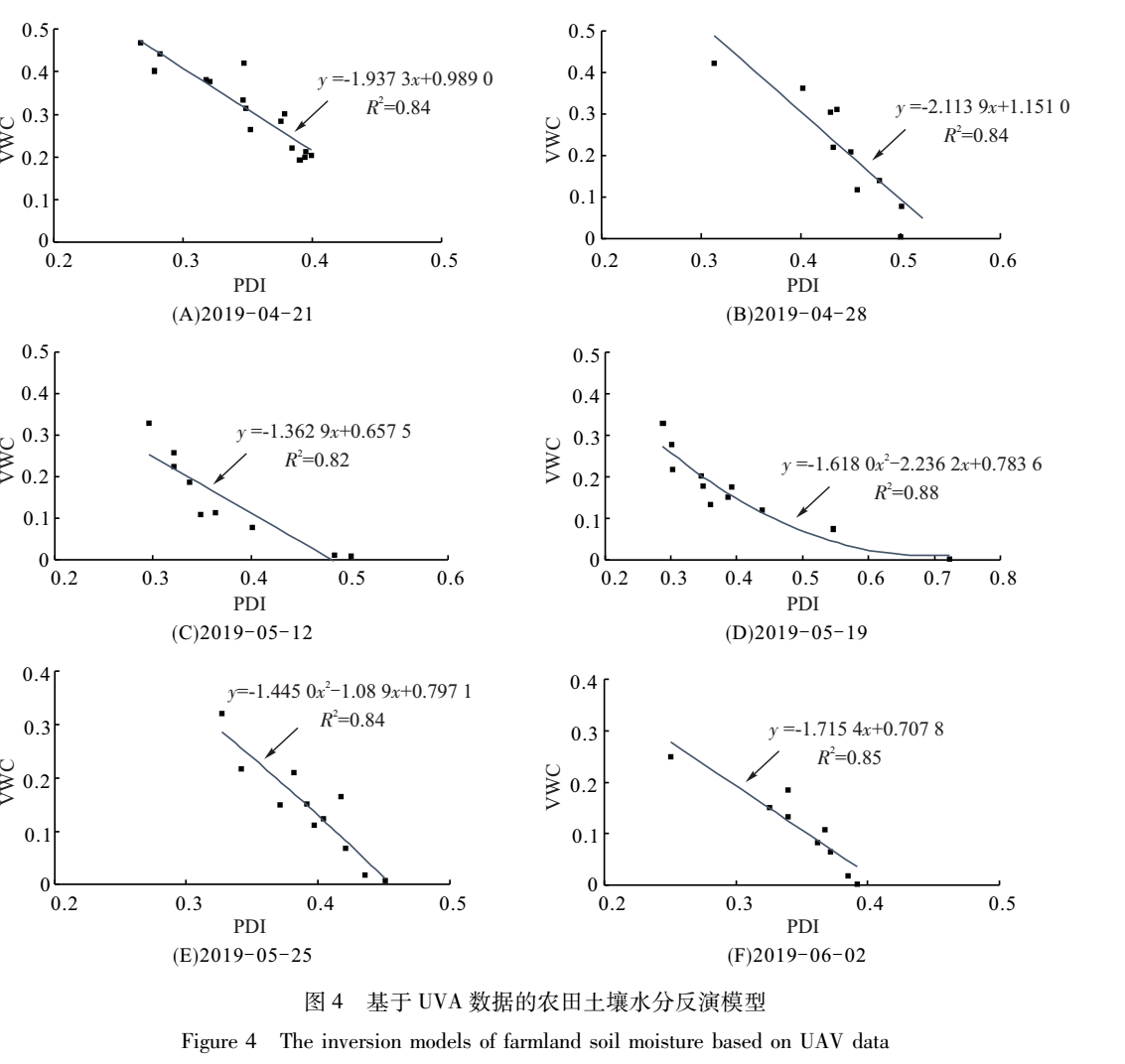
本文一共获取了6个时相的农田UAV多光谱数据和田间样点土壤水分数据进行实验. 根据在重点观测区所探测的建模样点的土壤体积含水率(VWC)和农田土壤范围的PDI,分别建立 VWC与PDI 的关系模型,得到每个时相的农田土壤水分反演模型结果(图4).
由 6个时相的模型结果可知:PDI 与VWC值均呈负相关关系,PDI 越高,则 VWC越低,即土壤水分越低;从模型的拟合效果来看,6个时相的模型方程的拟合较好,决定系数 R2均在0.8以上,且拟合方程的显著性检验均具有统计学意义(P<0.01).
3.2 土壤水分监测结果
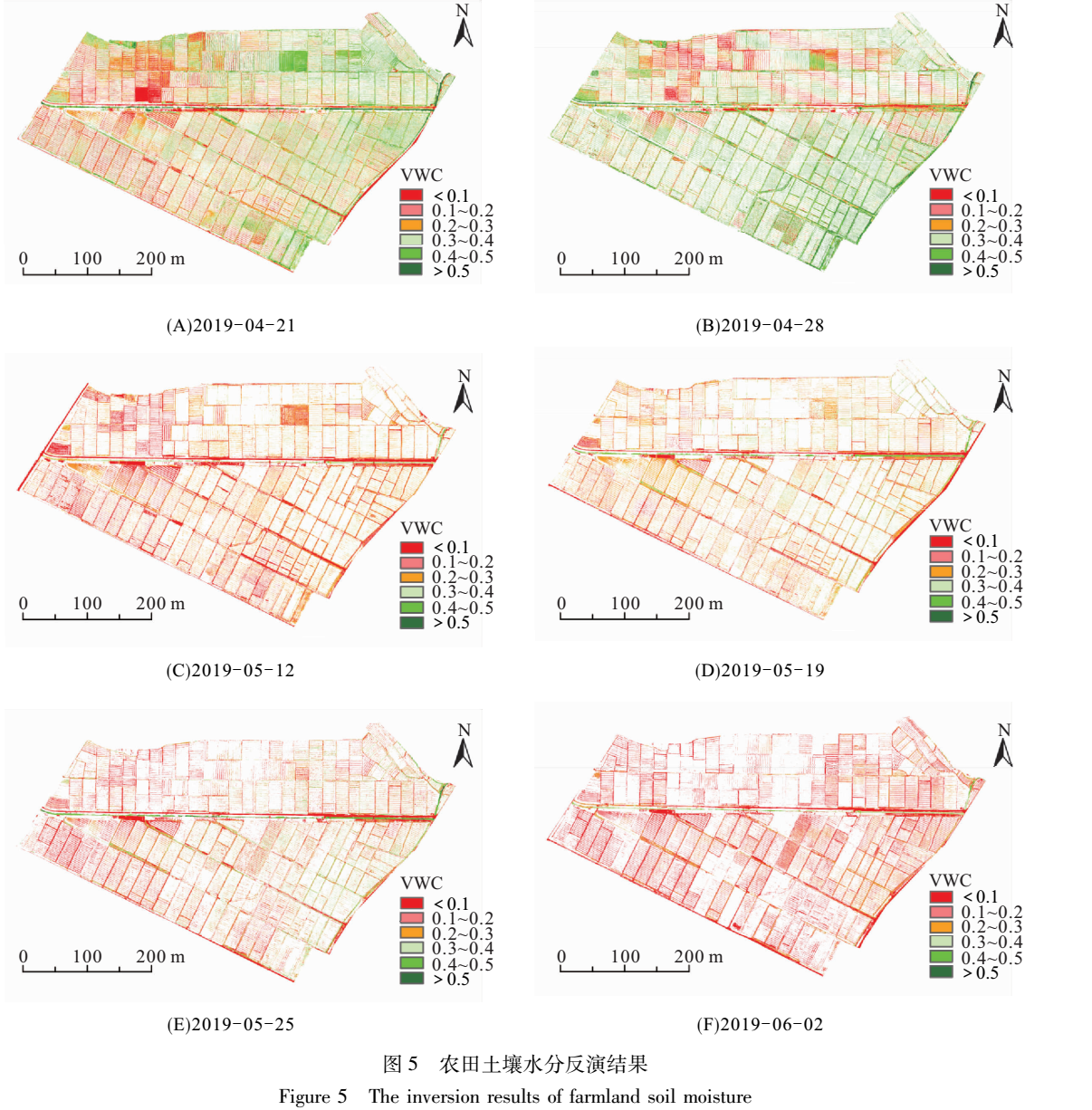
基于上述的农田土壤水分反演模型,计算6个时相的农田VWC 值(图5),即可以得到每个时相的农田土壤水分反演结果,实现整块农田土壤水分的监测. 由图5可知:(1)从农田土壤水分结果来看,经像元统计得到 6个时相的农田VWC 均值分别为0.28、0.34、0.16、0.23、0.16、0.15;农田土壤水分在作物生长期呈先增加后减少的趋势,在作物生长后期( 2019年5月中下旬) 则明显减少 (2)从农田土壤水分空间分布来看,农田的土壤水分在不同时期均存在空间分布不均的情况,在作物生长前期(2019年4月) 表现得最为明显;2019年4月21日农田东边的土壤水分明显大于西边,4月28日农田南边的土壤水分明显大于北边. 因此,通过土壤水分反演结果可以快速判断农田总体土壤水分的高低,还能快速获取农田土壤水分的空间分布情况,对农田精准灌溉和种植管理有重要的指导意义
3.3 精度验证
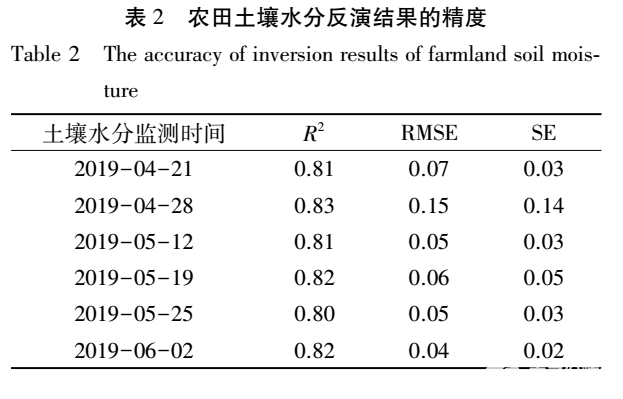
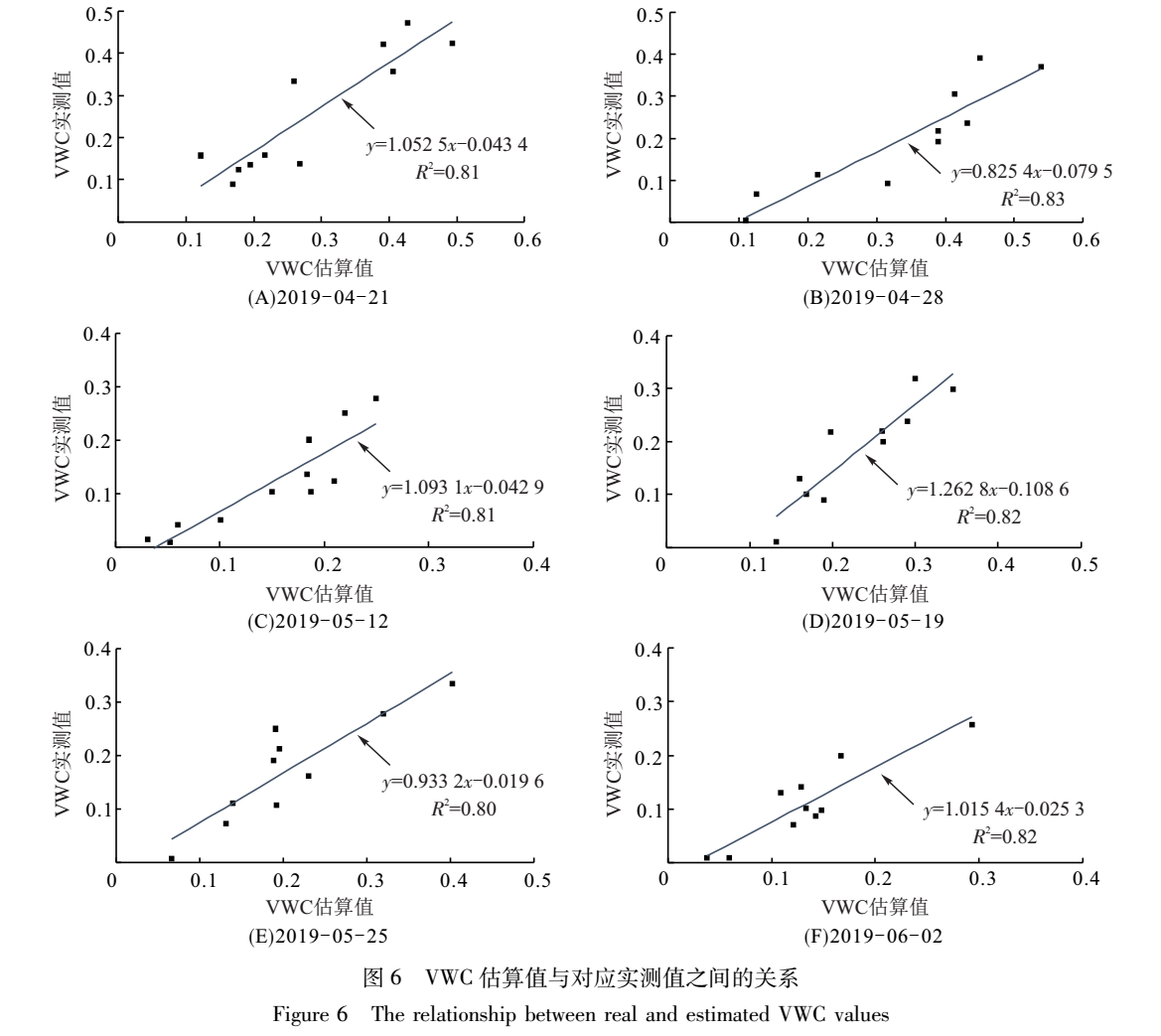
为了检验6时相土壤水分反演结果的精度水平,即对比模型反演结果( VWC估算值) 与土壤水分实际探测值( VWC实测值) 之间的差异,本文分别计算了 VWC估算值与对应实测值之间的 R2、RMSE和 SE,以验证反演结果的精度.由精度验证结果(表2 和图6) 可以看出:6 个时相的VWC 估算值与对应实测值之间的 R2 均在0.8以上;除 2019 年4月28日的结果外,其余 5个时相的 RMSE 和 SE 值均小于0.1;6个时相的SE 值均大于0,说明土壤水分反演结果略有高估. 整体上,6个时相的农田土壤水分反演结果精度较高,证明本文设计的基于 UAV 数据的农田土壤水分监测方法是有效的、可行的.
4、 结论
土壤水分是作物生长和发育的保证,对农田土壤水分进行监测,快速判断农田土壤水分的高低,获取农田土壤水分的空间分布情况,对农作物合理灌
溉和农业精准化管理有重要的指导意义. 本文基于UAV 多光谱数据和垂直干旱指数(PDI)实现了农田土壤水分的快速监测.本文一共获取了6 个时相的农田UAV多光谱数据和田间样点土壤水分数据,构建了6 个时相的农田土壤水分反演模型,并得到对应的农田土壤水分反演结果. 精度验证结果表明:整体上反演结果精度较高,6 个时相的农田土壤水分反演结果 R2 均在0.8 以上,5个时相的RMSE 和SE值均小于 0.1,说明本文设计的基于 UAV 数据监测农田土壤水分的方法是有效的、可行的. 因此,未来农田土壤水分监测,可以利用实时获取的 UAV 多光谱数据,选取 一个具有代表性的重点观测区进行随机样点土壤水分探测,快速构建农田土壤水分的反演模型,进而完成农田土壤水分的快速监测. 本文提出的方法可以推广和应用于大范围农田土壤水分的快速监测.
来源:冯珊珊,梁雪映,樊风雷,王 塞,伍健恒.于无人机多光谱数据的农田土壤水分遥感监测 [J]. 华南师范大学学报.2020,52(6):74-81
点将科技(www.Dianjiangtech.cn)成立于2001年,一直专注于生态环境和现代农业相关科研及应用系统和仪器的研发、销售及服务。公司总部位于上海,在香港、北京、昆明、合肥、西安设立大区办公室,及时响应客户的需求。公司一直致力于为用户提供更先进的技术和仪器以及更优质的服务,服务方向涵盖土壤、植物科学、环境气象、水文水质、海洋科学、动物、昆虫科学和现代农业等领域。
审核编辑:汤梓红
全部0条评论

快来发表一下你的评论吧 !

