

今日头条
基于迪文T5L1芯片的车牌识别功能,是通过T5L1接收并处理OV2640摄像头拍摄的车牌号图片、抓取车牌字符信息来实现的。图片处理过程借助了DGUS平台的基本显示功能,可在一定程度上减少二次开发工作。
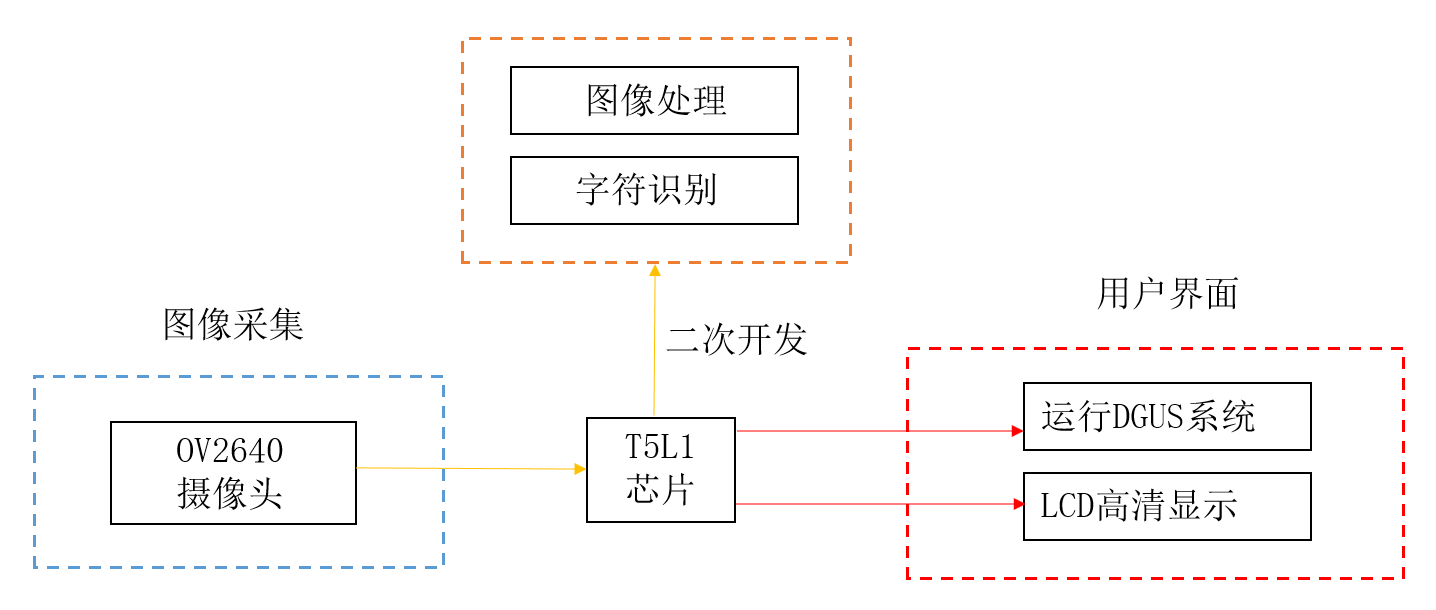
硬件连接:
P1口分别连接摄像头数据传输D0-D7管脚;
P2^0连接SCL、P2^1连接SDA、P2^2连接PWDN、P2^3连接RST、P2^4连接VSYNC、P2^5连接HREF、P2^6连接PCLK;
P2^1通过上拉电阻3.3k连接到电源3.3V上。
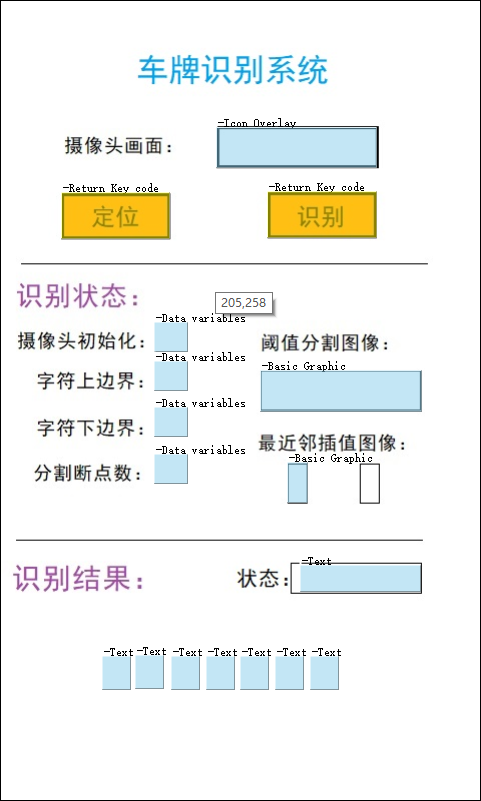
DGUS界面设置:
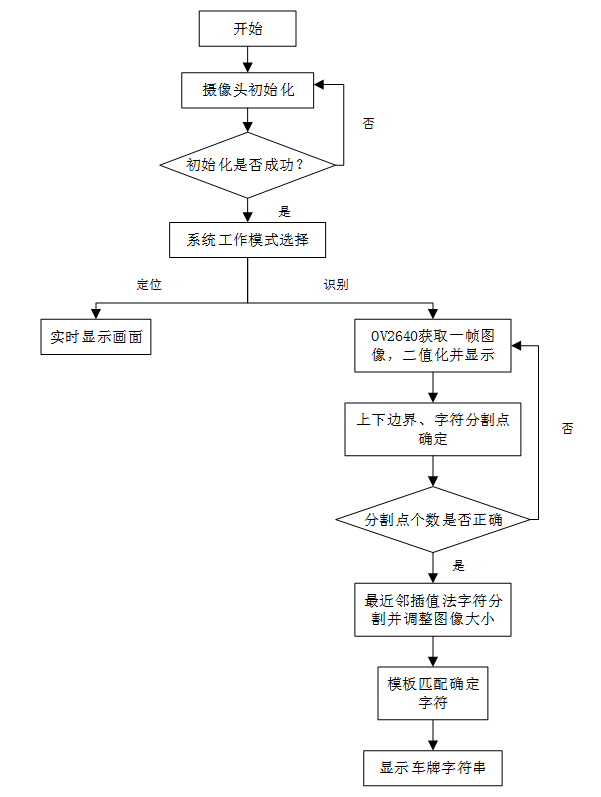
车牌识别流程图:
软件程序主要函数:
void RGBImage_Acquisition(void);
//RGB565数据采集,存储到内存空间
void JPGImage_Acquisition(void);
//JPG数据采集,在屏幕上显示
void RGBImage_threshold();
//二值化处理
void Gray_Filter();
//二值化后图像滤波,删除多余杂点
void GRAY_Image_draw();
//将二值化后的图像通过基本图形控件显示
void Table_ChangePoint(u16 Width, u16 Height);
//统计每行和每列黑色像素点的个数
void ChangePoint_Analysis_row(void);
//横向跳变点分析,用于统计图像的上下边界
void Nearest_neighbor(u8 left,u8 right,u16 up,u16 down);
//最近邻插值法将字符放缩到标准
void Nebour_GRAY_Image_draw();
//最近邻插值图像显示
u8 Segmentation_Char(void);
//分割字符个数统计及左右边界记录
void Template_Cnstruction();
//创建模板行列跳变特征向量
void Template_Comparison_All();
//全像素点与模板进行比较
void Template_Comparison();
//与模板行列特征向量比较
void License_plate_display(u16 x,u16 num);
//显示对比结果即最终输出
如果需要完整的开发资料包或者效果演示视频请留言联系。
全部0条评论

快来发表一下你的评论吧 !

