



分享资料个
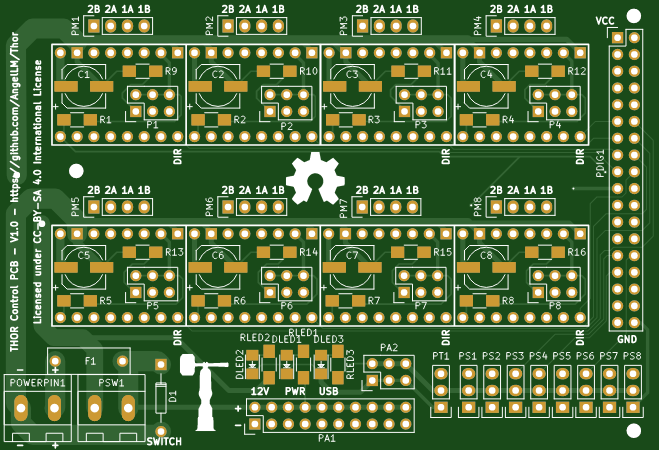
PCB图如下:
描述
雷神控制PCB
ControlPCB是Thor项目中用于控制驱动机械臂的步进电机的电路板。
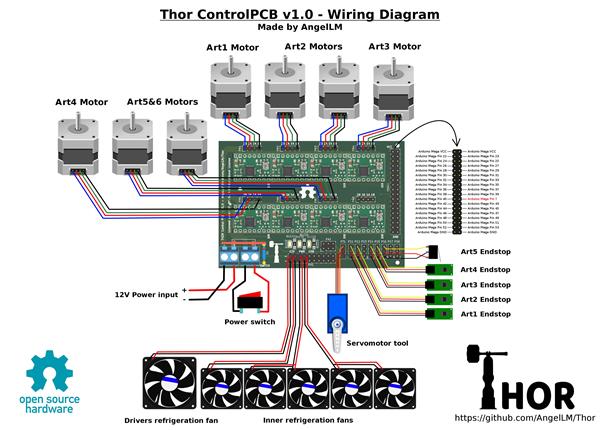
该板基于 RAMPS 1.4 并充当 Arduino Mega 的屏蔽,支持多达 8 个步进驱动器(A4988 和兼容)。它还支持多达 8 个末端停止器(每个电机 1 个)和一个 pwm 输出来控制机器人工具。它还具有 5V 和 12V 辅助电源轨。
您可以在此处查看 BOM ,您可以在其 GitHub 存储库中找到该板的源文件。
Thor是一个具有六个自由度的开源和可打印机械臂。其配置(yaw-roll-roll-yaw-roll-yaw)与市面上大部分机械手机器人使用的相同。在伸展位置,Thor 高约 625 毫米,可以举起高达 750 克的负载。
该项目的主要目的是设计一种可用于大学和学校教授机器人技术的机器人。考虑到这一点,设计必须负担得起且易于使用。发布源文件并在开源许可下这样做是最好的选择:任何人都可以深入研究机器人的任何元素,此外,还可以根据自己的需要对其进行修改或调整。
整个材料的成本低于 350 欧元。如此实惠,我认为几乎每个学校/大学/制造商都可以充分利用至少一个!
在许可方面,我希望这个项目是开源的,因为我希望任何人都有机会研究、修改和改进它。
Thor 仅使用开源工具开发:用于 3D 建模的 FreeCAD、用于 PCB 设计的 KiCAD 和用于控制电子设备的固件 GBRL。通过这种方式,可以保证任何人在任何地方都能获得知识,而无需任何经济成本。没有一个理由不攻击雷神!
如果您想了解更多关于这个项目的信息,请访问Thor 网站,在那里您可以找到文档、手册和论坛来解决您的所有疑问。
希望你喜欢!
天使 LM
代码
https://github.com/AngelLM/Thor
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
