

一、硬件配置:
西门子1200系列PLC,以CPU1214DC/DC/DC为例
CM1241 RS485模块
汇川IS620P和SV660P系列伺服驱动器
二、接线原理图:
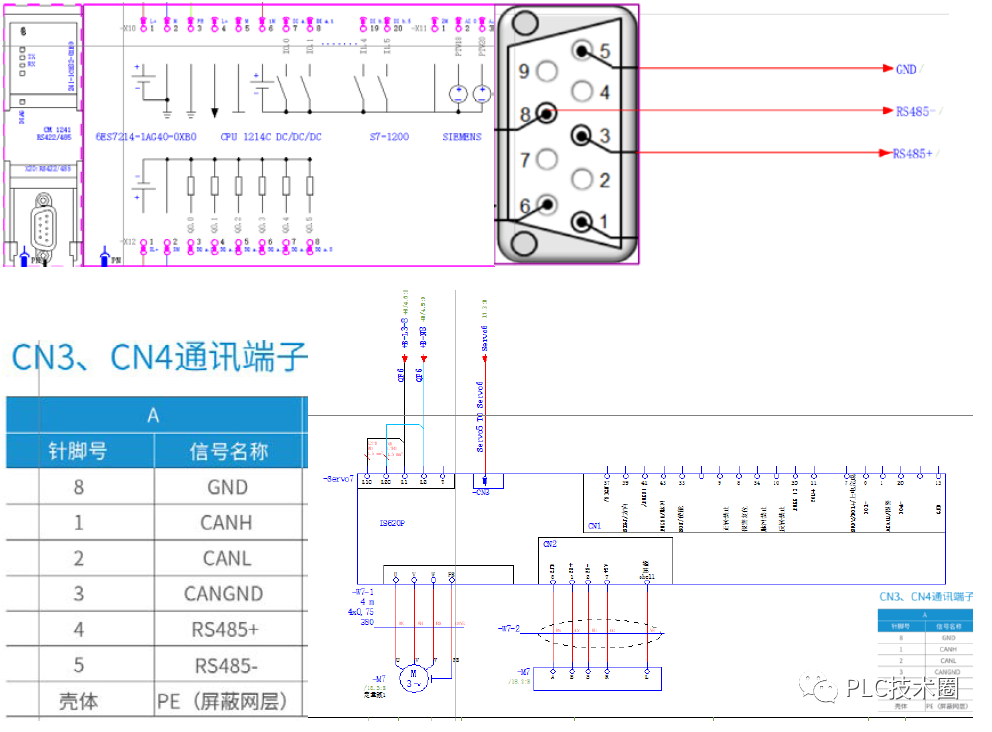
三、参数设置
1、驱动器侧
|
功能码 |
名称 |
设定值 |
出厂值 |
备注 |
|
H0C-00 |
驱动器轴站地址 |
1 |
0 |
1-247 |
|
H0C-02 |
串口波特率设置 |
4 |
5 |
0-2400bps 1-4800bps 2-9600bps 3-19200bps 4-38400bps 5-57600bps 6-115200bps |
|
H0C-03 |
数据格式 |
0 |
0 |
|
|
H0C-09 |
通讯VDI |
1 |
0 |
|
|
H0C-11 |
通信VDO |
1 |
0 |
|
|
H0C-26 |
通讯数据高低位 |
0 |
1 |
|
|
H06-02 |
速度指令选择 |
4 |
0 |
|
|
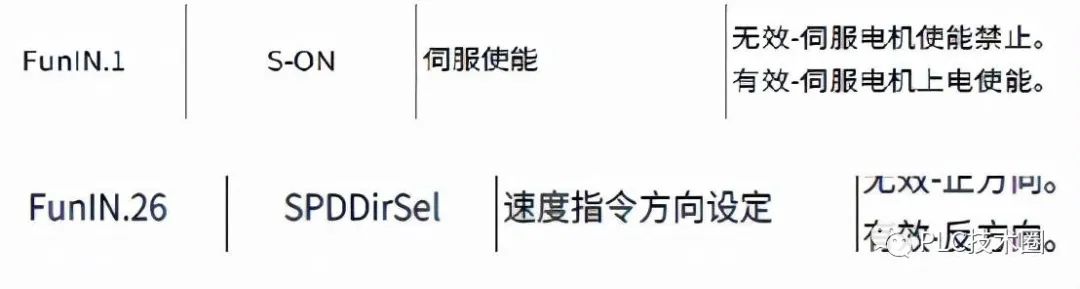
H17-00 |
VDI1端子功能选择 |
1 |
0 |
0-41 |
|
H17-02 |
VDI2端子功能选择 |
26 |
0 |
|
|
H31-00 |
通讯给定VDI虚拟电平 |
0 |
0 |
|
注意:设定H17-XX后,驱动器会报警(Er130),此类报警为VDI分配的点位重复分配,需要报对应的点位区分设定,例H17-00设定为1时,对应的H03-00若设定值为1则会报警,需要把H03-00设定为0,设定完成后重启一下驱动器。
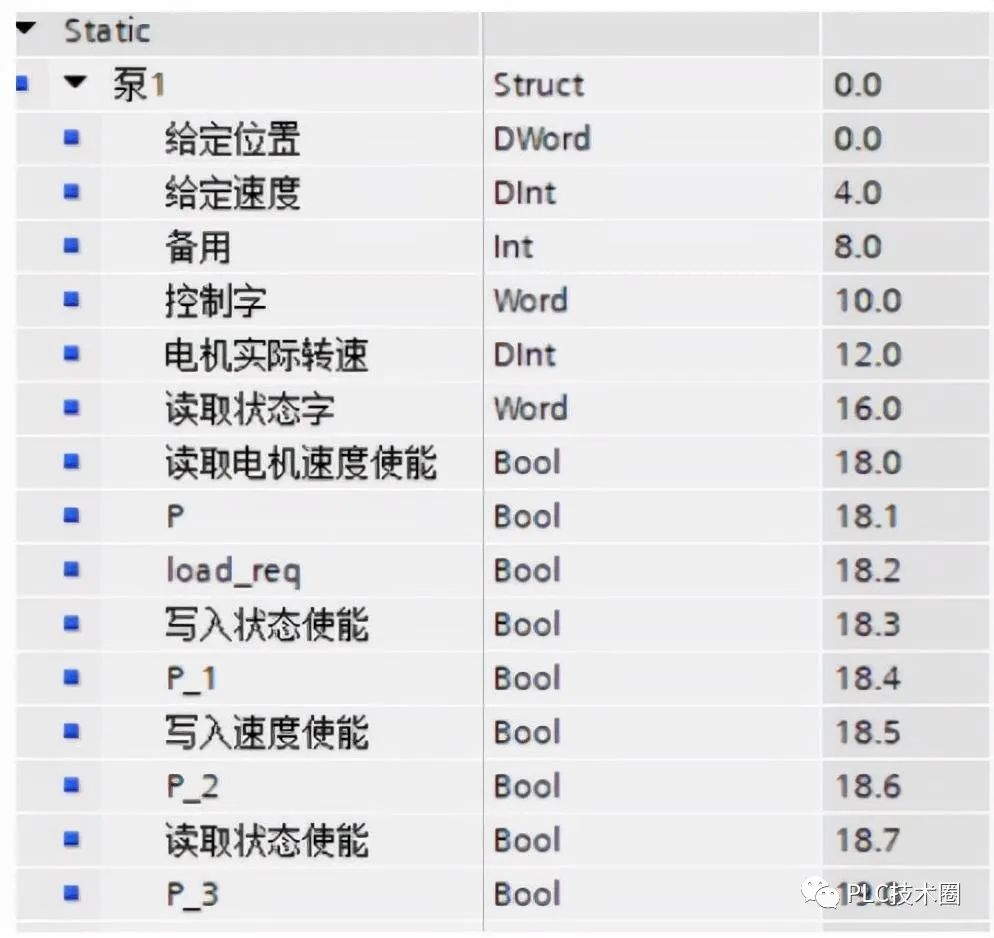
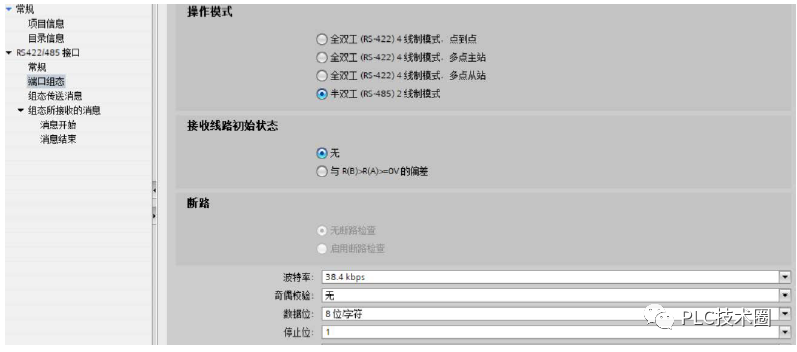
2、PLC短设置
新建项目——添加PLC硬件和CM1241模块——添加数据块“XXXX”——邮件数据块属性去掉优化块访问的√

给数据块添加变量
添加“MB_COMM_LOAD”
注意:要组态Modbus必须调用该端口一次,才能使用“MB_MASTER”“MB_SLAVE”PORT参数为485模块 的硬件标识符
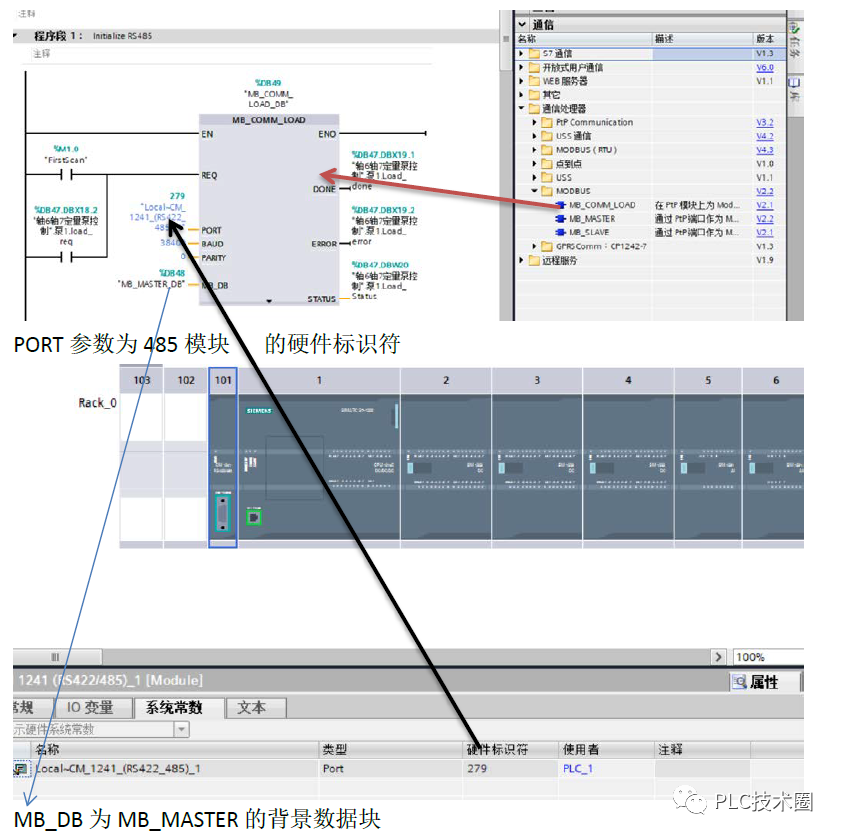
MB_DB为MB_MASTER的背景数据块
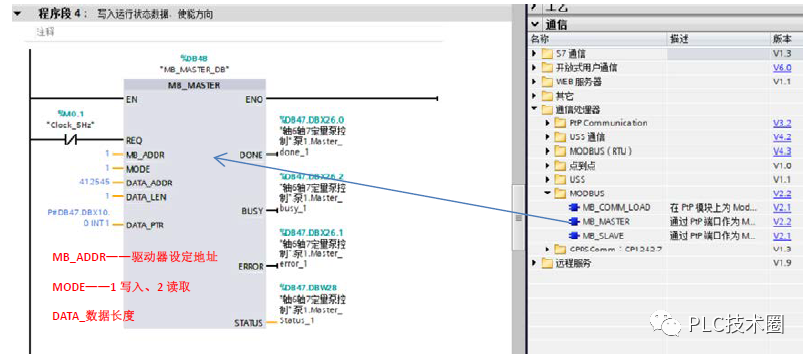
DATA_ADDR参数412545对应H31-00参数,H31为16进制3100转换为10进制为3×16³+1×16²+0×16+0×1=12544,H31-00为12544+00,再加上400001得到412545,有同学要问为什么加400001呢:Modbus Master 协议库支持如下地址
000001-099999:数字量输出(线圈)
100001-199999:数字量输入(触点)
300001-399999:输入数据寄存器(通常为模拟量输入)
400001-499999:数据保持寄存器
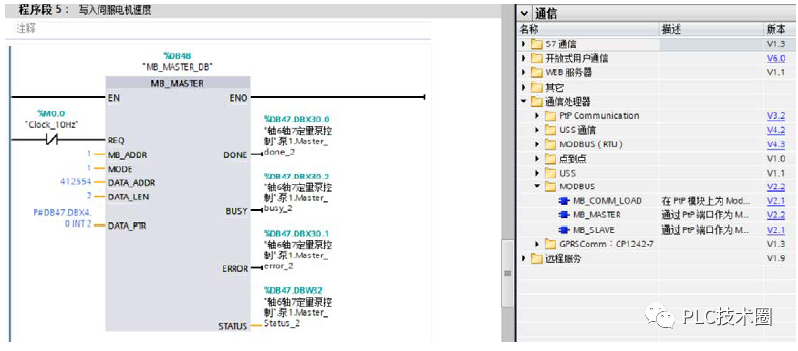
写入方向后给定速度
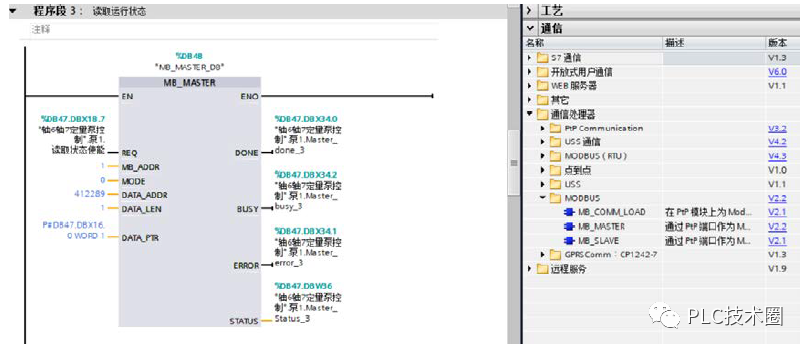
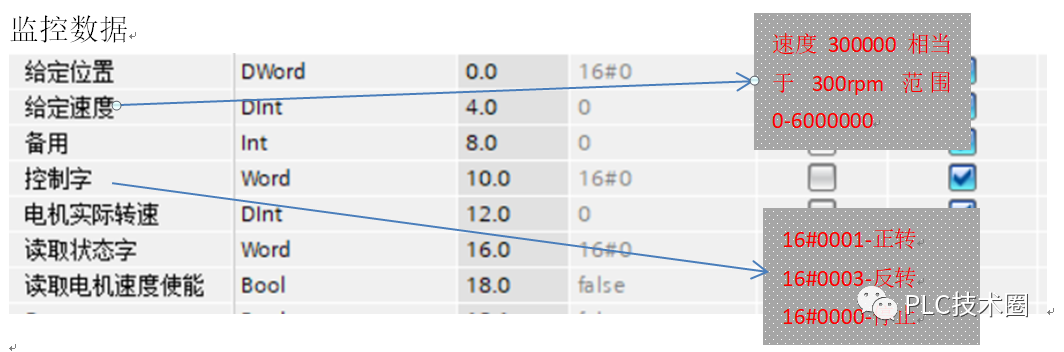
读取数据
以上实例为速度模式控制,还有位置控制模式,转矩控制模式等等!
审核编辑 :李倩
全部0条评论

快来发表一下你的评论吧 !

