

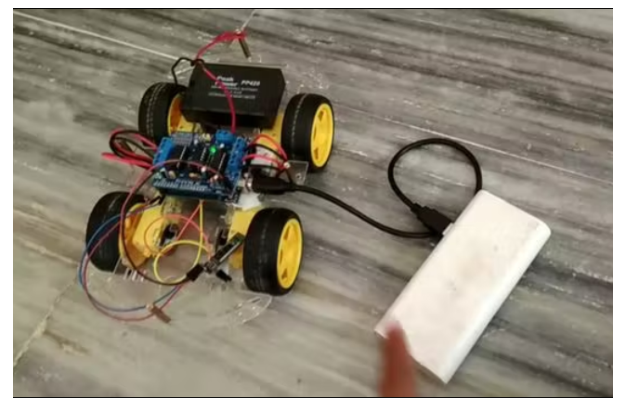
这是一款使用HC-05蓝牙模块与手机进行通信的蓝牙控制车。
我们可以通过蓝牙用手机控制汽车。使用一个应用程序来控制汽车的运动。
第 1 步:要求

Arduino
电机护罩
电机电池(4v以上1amp以上)
为 Arduino 供电的 5v 移动电源
HC-05蓝牙模块
机器人底盘
第 2 步:组装机箱

根据给定的底盘说明组装电机、车轮和底盘。
第 3 步:下载 Zip 文件
下载压缩文件
并提取它
第 4 步:添加自动对焦马达库
提取 zip 文件
打开提取的文件夹
复制自动对焦马达文件夹
转到文档部分
打开 Arduino 文件夹
现在打开库文件夹
粘贴 AFMotor 文件夹
关闭
第 5 步:上传程序

将 Arduino 与笔记本电脑或 PC 连接
再次打开提取的文件夹
打开汽车程序
转到 Arduino 软件中的工具
确保板是 Arduino Uno 和 Arduino 连接的端口
上传程序
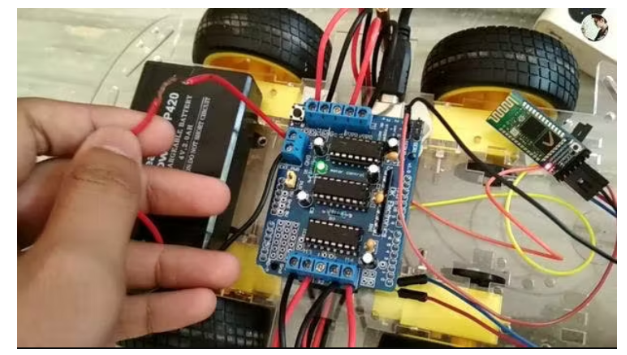
第 6 步:电路连接
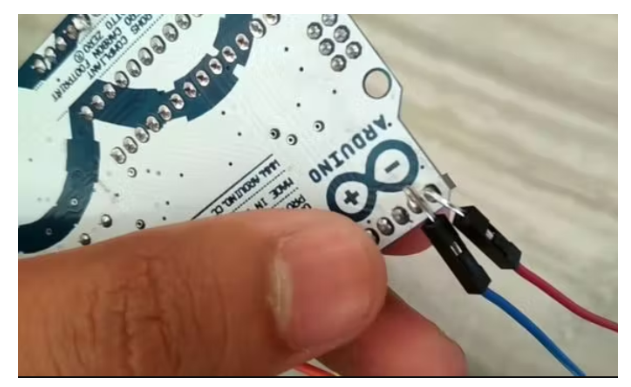
在 Arduino 的 0 和 1 引脚处焊接两根电线:RX 和 TX。
将电机护罩固定在 Arduino 顶部
按照原理图将所有电机连接到电机护罩上。
左侧电机连接到 M3 和 M4
右电机连接到 M1 和 M2
如果有任何电机反向旋转,则将电机的接线接反。
第 7 步:添加蓝牙模块
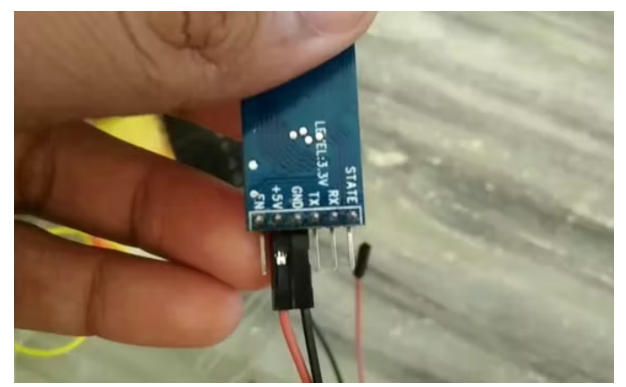
带蓝牙模块
在 +5v 和 GND 处连接两根母线到母线
如图所示,将蓝牙的 +5v 和 GND 与伺服的 + 和 - 连接到电机屏蔽上。
将Arduino的RX连接到蓝牙模块的TX
将 Arduino 的 TX 连接到蓝牙模块的 RX
第 8 步:为 Arduino 和电机供电
通过 USB 线将移动电源连接到 Arduino
将电池连接到电机护罩
第 9 步:连接应用程序
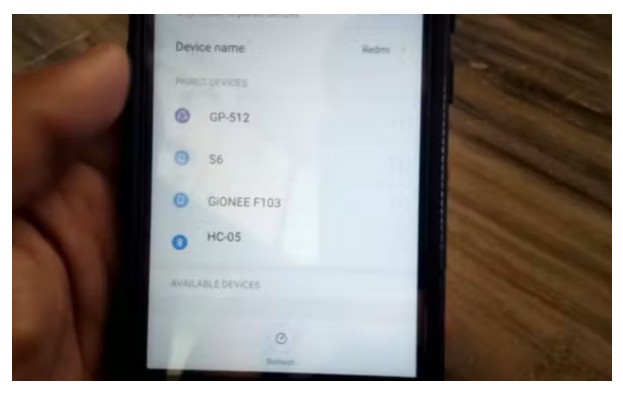
打开蓝牙
搜索新设备
点击 HC-05
输入密码1234
配对后,打开 Play 商店
搜索 Arduino 蓝牙遥控车
下载应用程序并打开
点击设置图标
点击连接汽车
点击 HC-05
当红灯变为绿色时,表示已连接
全部完成
第 10 步:全部完成

Mobile Controlled car code:
#include
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
char bt='S';
void setup()
{
Serial.begin(38400);
motor1.setSpeed(255);
motor2.setSpeed(255);
motor3.setSpeed(255);
motor4.setSpeed(255);
Stop();
}
void loop() {
bt=Serial.read();
if(bt=='F')
{
forward();
}
if(bt=='B')
{
backward();
}
if(bt=='L')
{
left();
}
if(bt=='R')
{
right();
}
if(bt=='S')
{
Stop();
}
}
void forward()
{
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void backward()
{
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void left()
{
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void right()
{
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void Stop()
{
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
全部0条评论

快来发表一下你的评论吧 !

