

今日头条
作者:YAJUNG TU产品应用工程师Analog Devices
激光二极管在光纤通信系统中用作发送信号的发射激光器、用于掺铒光纤放大器 (EDFA) 和半导体光放大器 (SOA) 的泵浦激光器。在这些应用中,激光器的特性,包括波长、平均光功率、效率和消光比都必须保持稳定,以确保电信系统的整体性能。然而,这些特性取决于激光器的温度:只要温度漂移,波长就会改变,转换效率就会下降。所需的温度稳定性范围为 ±0.001°C 至 ±0.5°C,因应用而异。
温度控制需要一个由热敏电阻、热电冷却器 (TEC) 和 TEC 控制器组成的回路。由于热敏电阻的电阻随温度成比例变化(负比例或正比例,取决于热敏电阻的类型),当配置为分压器时,它可用于将温度转换为电压。TEC 控制器会将这个反馈电压与代表目标温度的参考电压进行比较,然后通过控制流过它的电流来调整 TEC 必须传递的热量。
上述系统的总图 如图1所示。激光二极管、TEC 和热敏电阻位于激光模块内部。TEC 控制器 ADN8833 或 ADN8834 将从热敏电阻读取反馈电压并向 TEC 提供驱动电压。微控制器用于监视和控制热回路。请注意,热回路也可以在模拟电路中构建。ADN8834 具有两个内置的零漂移斩波放大器,可用作 PID 补偿器。
本文将描述电信系统中激光二极管热控制系统的组成,并介绍主要部件的关键规格。目的是从系统级的角度介绍设计考虑,为设计人员提供如何构建具有良好温度控制精度、低损耗和小尺寸的高性能系统的总体指南。
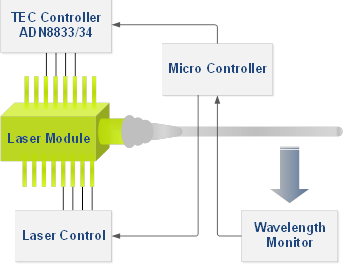
图 1:激光模块的温度控制系统。
热电冷却
TEC 技术 TEC 由两个表面陶瓷板和其间交替放置的 P 型和 N 型半导体阵列组成, 如图 2 所示。当电流流过这些半导体时,热量会在一端被吸收,在另一端释放,当电流方向反转时,热传递也会反转。这个过程称为珀尔帖效应。N型半导体中的载流子是电子;因此,它的载流子和热量从阳极流向阴极。对面的 P 型半导体具有空穴载流子,热量也沿相反方向流动。取一对 PN 半导体并用金属板将它们连接起来, 如图 3 所示,当电流流过时,热量将沿一个方向传递。
通过改变直流电压的极性使传热方向可逆,传热量与电压幅值成正比。凭借其简单性和稳健性,热电冷却被应用于电信系统中的各种热调节应用。
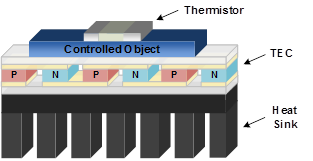
图 2:带散热器的 TEC 模块。
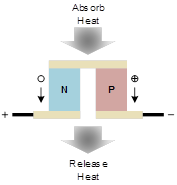
图 3:珀尔帖效应:PN 半导体对的热流。
选择 TEC 模块 选择 TEC 模块时需要考虑系统中的许多因素,例如环境温度、目标对象温度、热负载、电源电压和模块的物理特性。必须仔细估算热负荷,以确保所选的 TEC 模块有足够的能力从系统中抽出热量以维持目标温度。TEC模块制造商通常在数据表中提供两条性能曲线;一张显示了在不同温度增量 (ΔT) 与电源电压之间的传热能力,另一张显示了在电源电压和 ΔT 的不同组合下所需的冷却/加热电流。设计人员可以估算模块的功率容量并确定它是否足以满足特定应用的需求。
TEC控制器操作和系统设计
为了使用 TEC 补偿温度,TEC 控制器应该能够根据反馈误差产生一个可逆的差分电压,同时提供适当的电压和电流限制。ADN8834的简化系统框图 如图4所示。主要功能块包括温度检测电路、误差放大器和补偿器、TEC 电压/电流检测和限制电路以及差分电压驱动器。
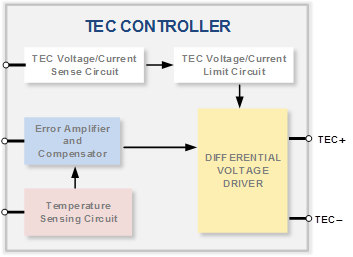
图 4:单片 TEC 控制器 ADN8834 的框图。
差分电压驱动器 TEC 控制器输出一个差分电压,以便通过 TEC 的电流方向可以将热量从 TEC 上的物体上抽走,或者平滑地切换到相反的极性以将热量泵入物体。电压驱动器可以是线性模式、开关模式或这两种驱动器的混合桥。线性模式驱动器更简单、更小,但效率低下。另一方面,开关模式驱动器具有良好的效率——高达 90% 以上——但在输出端需要额外的滤波电感器和电容器。ADN8833 和 ADN8834 采用混合配置,配备一个线性模式驱动器和一个开关模式驱动器,将笨重的滤波组件数量减少一半,同时保持高效性能。
电压驱动器设计对控制器至关重要,因为它占据了大部分功耗和电路板空间。一个最佳的驱动器级可以帮助最小化功率损耗、电路尺寸、对散热器的需求以及成本。
使用 NTC 热敏电阻进行温度检测图 5 显示了负温度系数 (NTC) 热敏电阻随温度变化的阻抗。由于其温度依赖性,当作为分压器连接时,它可用于将温度转换为电压。典型连接如图 6所示;VFB 随 RTH 随温度变化而变化。通过添加与热敏电阻串联的 RX,温度到电压的传递函数可以相对于 VREF 线性化, 如图 7 所示。重要的是它与模块外壳内部的激光器紧密耦合,与外部温度干扰隔离,因此它可以准确地感应温度。
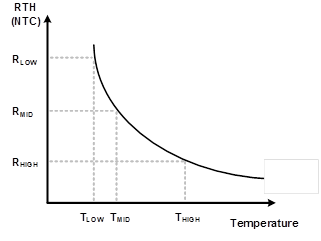
图 5:NTC 随温度变化的阻抗曲线。
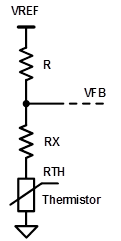
图 6:作为分压器连接的 NTC 热敏电阻将温度读取为电压。
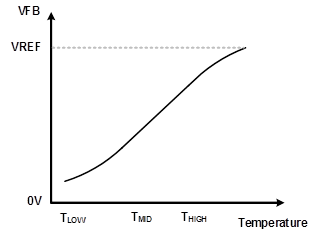
图 7:VFB 随温度变化。
误差放大器和补偿 器 模拟热反馈回路具有由两个放大器组成的两级, 如图 8 所示。第一个放大器采用热反馈电压 (VFB) 并将输入转换或调节为线性电压输出。该电压代表物体温度,并馈入补偿放大器,在此与温度设定点电压进行比较,从而产生与差值成比例的误差电压。如图所示,第二个放大器通常用于构建一个 PID 补偿器,该补偿器由一个极低频极点和两个较高频率的独立零点组成。
PID 补偿器可以通过数学或经验来确定。要对热回路进行数学建模,需要 TEC、激光二极管、连接器和散热器的精确热时间常数,而这并不容易获得。凭经验调整补偿器更为常见。通过在温度设定点终端中声明一个阶跃函数并改变目标温度,设计人员可以调整补偿网络以最小化 TEC 温度的稳定时间。
激进型补偿器对热扰动反应迅速,但也很容易变得不稳定,而保守型补偿器稳定缓慢,但可以容忍热扰动,但过冲的可能性较小。在系统稳定性和响应时间之间取得平衡很重要。
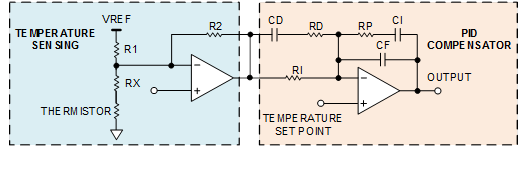
图 8:使用 ADN8834 内部的两个斩波放大器的热反馈回路图。
TEC控制器系统的关键性能
温度调节精度 有时稳态误差仍然存在,即使 PID 补偿器设计得当。有几件事可能会导致此错误:
TEC 热功率预算:TEC 和电源电压是设计系统时首先选择的两个因素。但是,由于热负荷不易估算,因此选择可能不正确。在某些情况下,当 TEC 已施加最大电功率但仍无法满足目标温度时,这可能意味着热功率预算不足以处理热负荷。增加电源电压或选择具有更高额定功率的 TEC 可以解决此问题。
参考电压一致性:参考电压会随着温度和时间而漂移,如果热回路闭合,这通常不是问题。然而,特别是在数字控制系统中,TEC 控制器和微控制器的参考电压可能会发生不同的漂移,从而导致补偿器看不到的误差。建议两个电路使用相同的参考电压,使用驱动能力较高的电压覆盖另一个。
温度传感:精确传感负载温度对于最大限度地减少温度误差至关重要。来自反馈的任何错误都将被引入系统,并且无法由补偿器纠正。使用高精度热敏电阻和自动调零放大器来避免错误。热敏电阻的放置也很重要。确保它连接到激光器上,以便它可以读取它控制的实际温度。
效率 驱动级消耗 TEC 控制器的大部分功率。在 ADN8833/34 中,考虑到其输入至输出电压降和负载电流,线性驱动器的功耗很容易计算。开关模式驱动器的损耗比较复杂,大致可以细分为导通损耗、开关损耗和过渡损耗。传导损耗与 R ds(on) 成正比场效应管和滤波电感的直流电阻。它可以通过选择低电阻元件来减少。开关损耗和过渡损耗很大程度上取决于开关频率。频率越高,损耗越大,但可以减小无源元件的尺寸。为了实现最佳设计,必须仔细考虑效率和空间之间的权衡。
噪声和纹波 ADN8833/34 中的开关模式驱动器开关频率为 2 MHz,快速 PWM 开关时钟沿包含宽频谱,在 TEC 端子处产生电压纹波,并在整个系统中产生噪声。通过添加适当的去耦和纹波抑制电容器可以降低噪声和纹波。
在电源电压轨上,纹波主要由开关模式电源常用的降压拓扑中的 PWM FET 斩波的不连续电流引起。并联使用多个 SMT 陶瓷电容器以降低 ESR 并局部去耦电源电压。在开关模式驱动器输出节点上,电压纹波是由滤波电感的电流纹波引起的。为了抑制这种纹波,在驱动器的输出到地之间并联多个 SMT 陶瓷电容器。由于纹波电压主要由电容器的等效串联电阻 (ESR) 和电感器纹波电流的乘积决定:ΔV TEC = ESR · ΔI L。使用多个电容并联可以有效降低等效ESR。
为电信系统中的激光二极管设计 TEC 控制器系统是一项复杂的工作。除了热精度方面的挑战外,封装尺寸通常非常小,功耗容差也很低。一般来说,一个设计良好的TEC控制器应具备以下优点:
精确的温度调节
高效率
小板尺寸
低噪声
电流电压监测与保护
审核编辑 黄昊宇
全部0条评论

快来发表一下你的评论吧 !

