

工业控制
导读:首先需要说明的是PI电流调节器和无差拍电流预测控制器的作用都是为了求得电压参考指令作为脉宽调制SVPWM模块的输入。本期文章以传统的PI和复矢量PI调节器与无差拍电流预测控制器作为分析对象,进行控制性能对比。
一、两种PI电流调节器
前期文章已经对PI电流调节器的工作原理和种类作了详细的说明,本期就不再阐述。
1.1传统PI电流调节器
传统PI电流调节器如公式(1)所示,对d、q轴电流进行分别调节。
从式1可以看出,整个PI系统主要由比例调节和积分调节两部分构成。比例调节是一种最简单的调节方式,控制器的输出与输入误差成正比关系,该调节方式可以对偏差做出瞬间的调节,能有效地减轻系统的滞后特性,但会出现静差。积分调节中控制器的输出与输入误差的积分成正比关系,虽然这样可以有效的消除系统的静差,但会使系统的响应速度下降,并且会增加系统的超调量。PI 调节综合了比例和积分调节的两种优点,既能够快速抵消干扰,也能够消除静差,因此在实际工程中应用十分广泛。
由式1可以看出,PI 调节器的比例、积分参数对整个控制系统的可靠性与稳定性影响巨大,因此PI 参数整定是控制系统设计的核心内容。目前 PI 参数整定的方法有很多,如自适应PI、神经网络等,这些方法在实际应用中的控制设计太过复杂.目前,一般工程仍然采用的试凑,这不仅工作繁琐,误差也比较大。
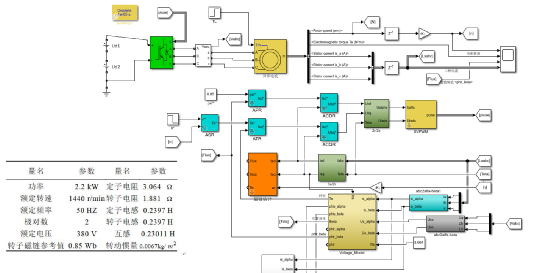
图1 传统PI电流调节器
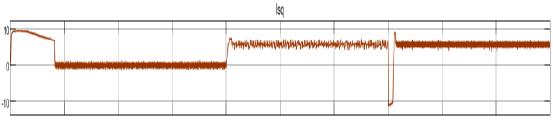
图2 传统PI电流调节器q轴电流阶跃响应
基于传统PI电流调节器的FOC中q轴电流阶跃响应虽然具有较快的上升速度但超调量很大。
1.2复矢量PI电流调节器
传统的线性 PI 调节器将电流内环分离成 d、q 轴两个控制环,由于两个环路之间存在交叉耦合项并不能实现完全独立设计。而复矢量调节器将 d、q轴的电流环当作一个整体,与传统方法相比具有更优的控制性能和参数鲁棒性。
将电机数学模型的状态方程中的反电动势项略掉后进行拉普拉斯变换,得到定子电流到电压的传递函数如式(2)所示。
根据公式(2),可以设计复矢量调节器如式(3).

图(3)是基于复矢量调节器的电流环的控制框图。
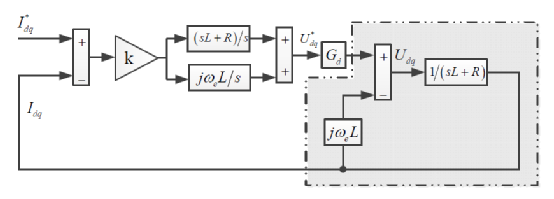
图3 基于复矢量调节器的控制框图
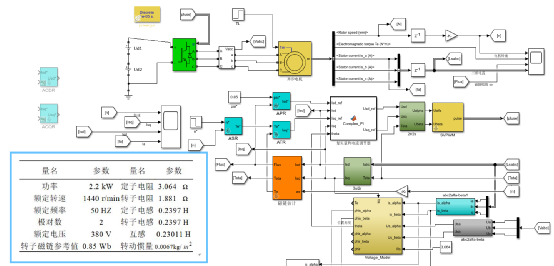
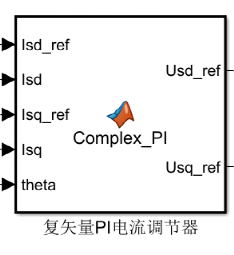
图4 复矢量PI电流调节器
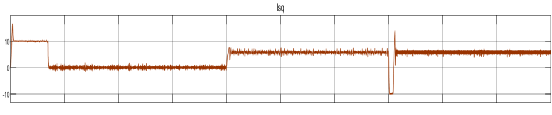
图5 复矢量PI电流调节器q轴电流阶跃响应
基于复矢量PI电流调节器的FOC中q轴电流相比较于基于传统PI电流调节器的动态效果要好一些,稳态时的谐波也更小一些。
二、无差拍电流预测控制器
传统异步电机矢量控制一般为转速外环、电流内环的双闭环结构,双闭环结构均采用PI 调节器,但数字 PI 调节器存在着固有的滞后特性,会对异步电机的转矩电流跟踪性能和动态响应特性造成一定影响,影响控制的效率,实际效果不能完全尽如人意,并且整个控制性能受电机参数影响较大。电流预测控制能够实现在当前控制周期下,预测出下一个周期的控制指令,从而从本质上解决 PI 调节的滞后性,提升系统的带宽。
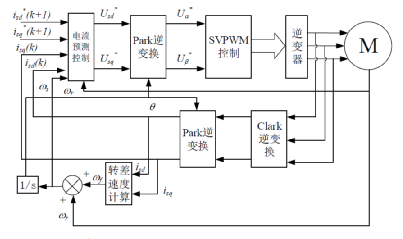
图6 基于无差拍电流预测控制器的异步电机矢量控制系统框图
无差拍电流预测控制器的思路:利用系统的数学模型和当前时刻的采样值,求出给定电压矢量,并使逆变器输出电压矢量,达到实际电流在下一采样周期能跟踪上给定电流的效果。
2.1电流预测控制器原理
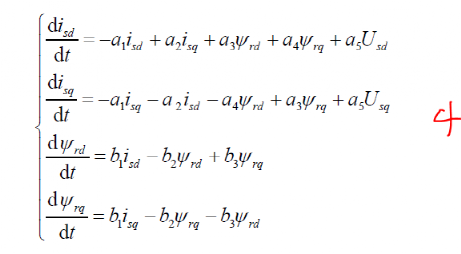
异步电机在两相同步旋转坐标系下的数学模型,选择定子电流和转子磁链作为状态变量,得到异步电机的状态方程如式4所示。
设计无差拍电流预测控制器需要将异步电机的数学模型离散化,由式4可得电机离散化状态方程,如式5所示。

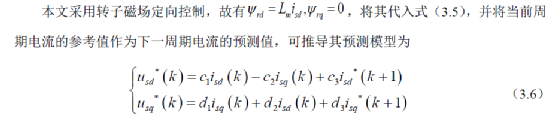
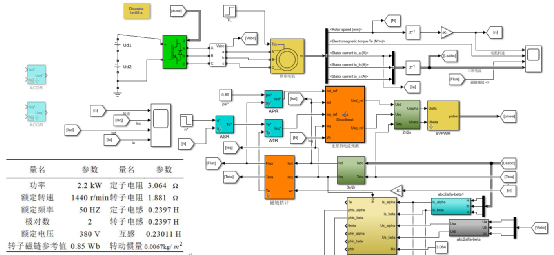
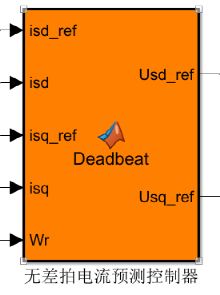
图7 无差拍电流预测控制器

图8 无差拍电流预测控制器q轴电流阶跃响应
三、仿真分析
图9 基于传统PI调节器的异步电机矢量控制系统仿真
图10 基于复矢量PI调节器的异步电机矢量控制系统仿真
图10 基于无差拍电流预测控制器的异步电机矢量控制系统仿真
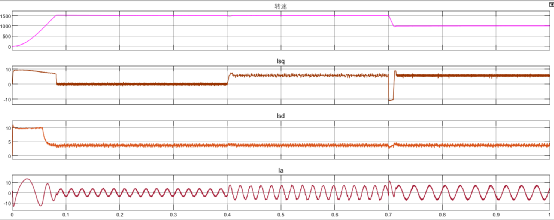
图a 传统PI
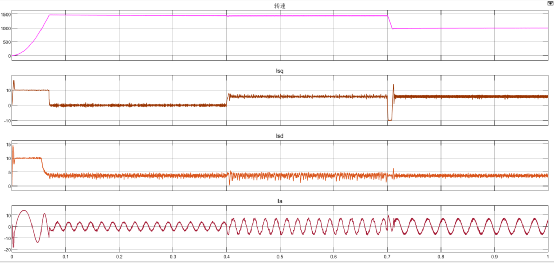
图b 复矢量PI
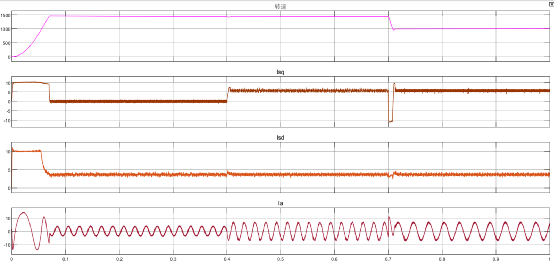
图c 无差拍电流预测控制器
通过以上仿真结果可以看出,相比较于传统PI电流调节器,采用电流预测控制器时转矩电流的跟踪特性明显改善且能明显的提升系统的动态性能,并在整个过程也能略过试凑PI 参数的繁琐过程。未考虑改变电机参数和其他特殊的运行方式时,两种调节器在仿真中的性能区别不是很大。但是总体上而言,复矢量PI调节器不像传统 PI 调节器那样将两个电流环分开考虑,所以复矢量PI调节器的结构要简单很多。
全部0条评论

快来发表一下你的评论吧 !

