

控制/MCU
董一波,刘立群,杨 阳,李志华,顾任远,周煜博 (甘肃农业大学 信息科学技术学院,甘肃 兰州 730070)
摘 要 :在农业发展过程中,果实采摘是极度耗费人力的工作。为了减少农业生产过程中的人工成本,将人工智能应用于农业领域将是一种有效手段。基于单片机的控制设计出一款智能抓取系统,拥有六关节高自由度机械臂 ;爪子采用柔性材料,在加强爪子和果实贴合度的情况下减少对果实的损伤程度 ;采用视觉系统进行图像处理,并采集三位坐标 ;采用避障系统控制小车前进 ;通过增加蓝牙模块让人工参与变得更加简便。本文设计的基于单片机的多关节机械臂抓取系统,有望提高农业采摘的效率,减少人工成本,将农业生产过程智能化。
中图分类号 :TP301 文献标识码 :A 文章编号 :2095-1302(2022)09-0076-03
0 引 言
中国自古是农业大国,以传统农业生产方式为主。然而,随着国际人口的增长,对自然资源的需求也不断加大。这使得传统农业生产出现了越来越严重的供应短缺,自然环境的负担也成倍增加。为了缓解这种矛盾,最优最大化利用自然资源并且将人类从繁重的体力劳动中解放出来,科学界提出了集中生产的现代化农业构想。近几年,智能机器人频繁出现在其他领域,考虑将智能机器人运用于农业方面也是一个不错的方案 [1]。迄今为止,应用于农业果实采摘方面的机器采集系统还没有普及,因此本文设计一种智能抓取系统,能够帮助采摘果实。
1 系统的总体构成
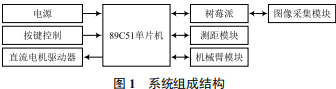
本文设计的机械臂智能抓取系统由三大模块组成 :视觉识别模块、机械臂和底座。系统以 89C51 单片机为核心操作器、六自由度机械臂作为执行合作机构。视觉系统通过摄像头捕获图像后进行实时处理,并反馈果实的三维空间坐标,实现果实数据的精准获得。底座通过红外线扫描获取数据,实时反馈前面路段的信息,实现小车的单目视觉正常行驶 [2]。系统组成结构如图1所示。
2 系统的硬件设计
2.1 89C51 单片机
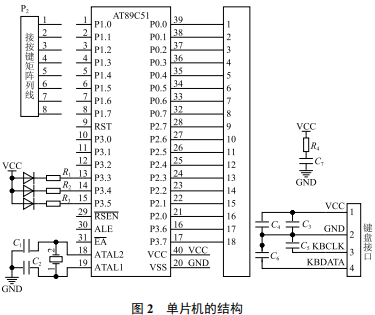
采用51单片机作为控制系统,以 89C51 为主控芯片,拥有 6 路接口的 PWM 舵机和四个独立接口的总线舵机,实现按键控制、采集电路、电源和过流保护。89C51 是一种高性能的CMOS8位处理器,通过电压控制,32 字节闪存逻辑器件和可擦除只读存储器是89C51的重要器件。目前,ATMEL 的 89C51 是一款高效的微控制器,它将8位多功能CPU 和闪存集成到一台单片机中 [3]。单片机的结构如图2所示。
2.2 机械臂模块
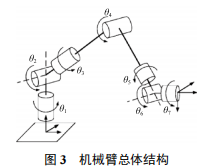
本抓取系统的机械臂由力臂和多功能爪子两部分构成。力臂上拥有六个数字舵机,分别控制六个关节,每个数字舵机都由单片机单独控制,可以实现不同关节伸展或延伸不同的角度,完成不同的工作。为了使机械手具有良好的柔性,获得良好的运动性能,并具有其他类型的角度冗余数据,采用了六自由度柔性机械手。机械臂的结构如图 3 所示。采用新型可提升不同通道的机械臂,实现空间提升,使分拣机具有足够的灵活性。另外,在移动平台的橡胶垫上设置了一个360°旋转紧固杆,避免了因旋转角度不足或夹住壳体而给机械臂的选择带来不便。后续根据实际的工作情况,针对不同应用领域,通过六个关节的力矩传感器与编码器等工具进行数据采集 ;然后通过一系列方法,主要是人类策略的控制方法、傅里叶级数表达式拟合等,逐步建立一个运动轨迹库,有利于机械臂在以后的工作中适应不同的作业 [4]。
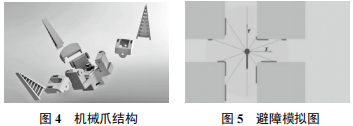
爪子是由三个数字舵机控制三个枝节组成的,三个枝节形成的三角形在抓取果实时更具有稳定性。三个数字舵机与单片机相连接,具有同时性,再提供足够抓力的前提下保障了爪子的稳定性 [5]。爪子的材料采用的是柔性材料,在抓取果实时,爪子可以根据果实的大小和形状,产生相应的形变,减小爪子与果实间的缝隙,尽可能地实现完美闭合,防止果实脱落。机械爪结构如图 4 所示。
2.3 底座模块
根据果园道路泥泞崎岖的突出特点,移动平台必须具备一定的道路选择和避障能力 [6]。平台系统采用四轮差速器,提高了移动平台的承重能力和稳定性,并在一定程度上提高了转向精度,更适合通道内的路径选择和避障,使移动平台更加平稳安全。每个轮子由电机驱动芯片控制单独的伺服电机控制。移动平台使用锂电池作为能源,通过不同的电源处理器及稳压模块,输送不同电压和电流到相应的工作单位中,实现能源的驱动 [7]。本文采用 E18-D80NK-N 红外线传感器和 US-100 超声波避障模块。E18-D80NK-N 红外线传感器的功能 :前方无障碍时输出高电平 ;有障碍时输出口电平会从高电平变成低电平,传感器检测到这一信号就可以确认正前方有障碍物,并传送给单片机,单片机通过输入内部的算法,协调小车两轮工作,从而完成躲避障碍物的动作。US-100 超声波避障模块的主要功能 :通过超声波发射装置发出超声波,根据接收器接到超声波时的时间差就可以测算距离。超声波发射端在单片机前置电路的驱动下工作,接收端的信号放大、整形后在单片机的中断口产生中断,通过发射和接收的时间差计算出小车与障碍物的相对距离 [8]。模拟图如图 5 所示。
2.4 视觉模块
为了能够精准地抓取果实,在抓取系统中增加视觉系统。视觉模块相当于抓取系统的眼睛,其作用决定了采摘果实的质量和现场采摘的速度 ;同时在视觉模块中引入了深度学习,重新建立模型和模拟人的大脑进行分析和预测,进而处理 3D图像和数据。通过对摄像机以各种方式采集的图像进行分析,可以得到 PTZ 缓动控制的能力,以便将来将运动目标保持在中心区域。运动目标跟踪在过去的十年中得到了广泛的研究,但在相同的经济背景下,运动目标跟踪面临着许多新的挑战。进一步的优化算法可以提高目标跟踪系统的鲁棒性 [9]。
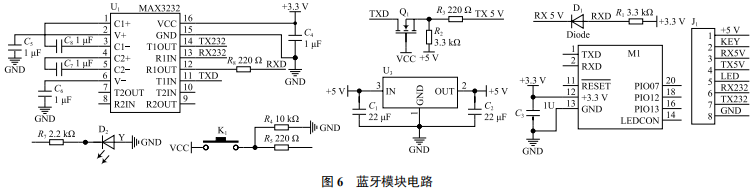
2.5 蓝牙模块
本文的操作系统增添了 HC-08 蓝牙串行通信处理模块,该模块是新一代数据传输系统模块,基于蓝牙规范 V4.0 蓝色协议。增添蓝牙模块的作用在于 :操作人员可以根据任务需求手动控制操作系统来完成相应的工作。手机可以在开放的环境中实现 80 m 网络通信 [10]。电路如图 6 所示。
3 结 语
本文的智能抓取系统以 51 单片机作为控制系统,89C51作为主控芯片,拥有六路接口的 PWM 舵机和四个独立接口的总线舵机,实现按键控制、采集电路、电源和过流保护等功能。用树莓派作为视觉处理系统的处理芯片进行图像采集 ;支持蓝牙 4.0 的远程操控,可以通过手柄、手机 APP 和电脑对机械臂进行操控,实现机械臂躯干的活动和机械爪的抓取工作。
注:本文通讯作者为刘立群。
参考文献
[1] 杨絮,牛亚琼,张璟言,等 . 基于六自由度机械臂的水果采摘装置设计 [J]. 科技创新导报, 2019,16(20):102.
[2] 姚佳 . 智能小车的避障及路径规划 [D]. 南京:东南大学,2005.
[3] 宏晶科技 . 89C51 单片机技术手册 [EB/OL]. [2022-09-20]. http://www.stcmcudata.com/.
[4] 郭志强,崔天时,吕信超,等 . 六自由度机械臂逆运动学求解 [J].农机化研究,2016,38(12):51-55.
[5] 杨文亮 . 苹果采摘机器人机械手结构设计与分析 [D]. 镇江:江苏大学,2009.
[6] 伍锡如,黄国明,刘金霞,等 . 新型苹果采摘机器人的设计与试验 [J]. 科学技术与工程,2016,16(9):71-79.
[7] 杜瑞廷,王张骏,何永杰,等 . 苹果自动采摘机的设计 [J]. 现代化农业,2019,41(9):65-66.
[8] 唐渊,周汝,段武斌,等 . 基于单片机控制的红外线与超声波混合避障智能小车 [J]. 中国设备工程,2018,34(12):179-180.
[9] 郑胤,陈权崎,章毓晋 . 深度学习及其在目标和行为识别中的新进展 [J]. 中国图象图形学报,2014,19(2):175-184.
[10] 蓝牙技术联盟 . Core_V4.0 [EB/OL]. [2022-09-20]. https://www.bluetooth.com/specifications/specs/core-specification-5-3/.
作者简介: 董一波(2004—),男,山西运城人,就读于甘肃农业大学,研究领域为电子信息工程。 刘立群(1982—),女,甘肃天水人,甘肃农业大学副教授,主要研究方向为智能计算、图像处理。 杨 阳(1999—),男,甘肃兰州人,就读于甘肃农业大学,研究领域为电子信息工程。 李志华(2002—),男,甘肃天水人,就读于甘肃农业大学,研究领域为电子信息工程。 顾任远(1998—),男,浙江诸暨人,硕士研究生,研究方向为深度学习、机器视觉。 周煜博(1996—),男,湖南湘潭人,硕士研究生,研究方向为图像处理。
编辑:黄飞
全部0条评论

快来发表一下你的评论吧 !

