



分享资料个
您对使用 Arduino 控制轮式机器人感兴趣吗?我敢肯定,在某些时候,您想控制自己的机器人。但是,总是有一个大问题:我没有带轮子的机器人。如何测试我的编程控制逻辑?
当我没有自己的机器人时,我也总是问自己这个问题。正是出于这个原因,我与 JLCPCB 公司合作建造了印刷电路板机器人车。

接下来,我们将展示构建 Arduino 控制的 PCB 机器人车项目的完整结构。
JLCPCB 机器人车采用 8 个 LED 和一个超声波传感器来检测障碍物。如您所见,2 个蓝色 LED 用于表示机器人的轮子。
此外,我们在每个后视镜中有 2 个红色 LED,在汽车前部有 4 个照明 LED。
使用这 8 个 LED,我们可以进行多种类型的模拟。例如,通过它们,您可以发出向前、向后、向左和向右移动的信号。
此外,当物体非常靠近汽车时,激活一些 LED。
您喜欢 JLCPCB 机器人车的各种可能性吗?如果您喜欢它,让我们了解如何使用 Arduino 构建我们自己的 JLCPCB 机器人车。
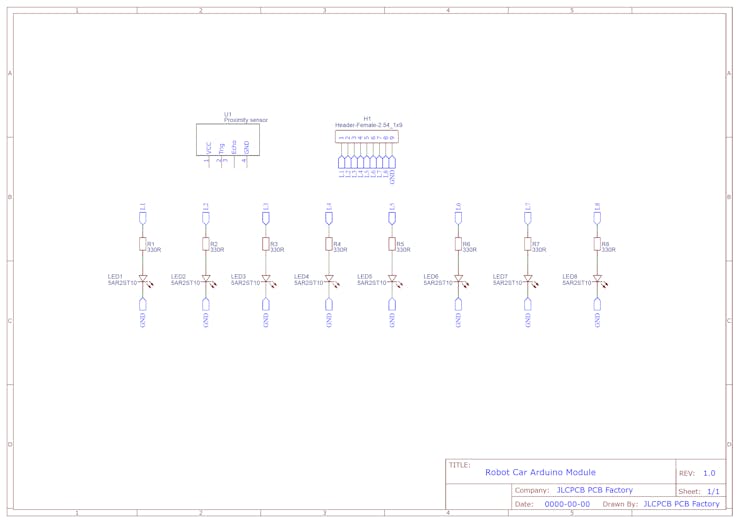
上面的示意图显示了电子板的电路元件的连接结构。
从这个电子方案,电子板被开发出来。该板的电子结构如下图所示。
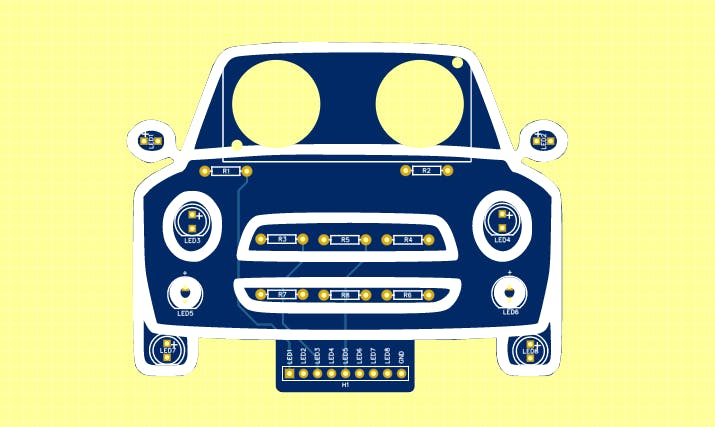
该板的结构非常简单,可以连接到原型板。
此外,还有一些孔可以将超声波传感器连接到 JLCPCB 机器人车的后部。
从那里,您将学习如何创建逻辑并将 JLCPCB 机器人车与 Arduino 一起使用。
为此,我们将解决以下问题:
当 JLCPCB 机器人车检测到障碍物时,用 Arduino 制定一个项目来偏转 JLCPCB 机器人车。机器人必须向右转,激活后视 LED 并在离开障碍物后继续前进。
现在,让我们动手开发这个项目。
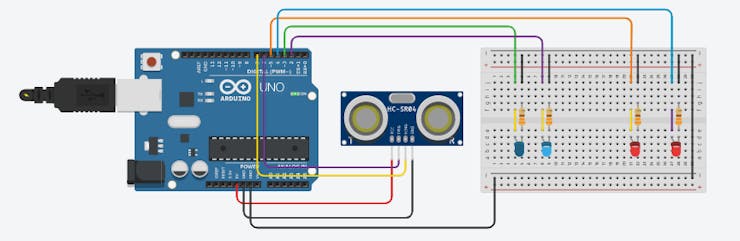
首先,我们必须构建下图中的电路。该电路由传感器和带有车轮和前照灯的汽车的 LED 组成。
_wnHGmvoie7.png?auto=compress%2Cformat&w=740&h=555&fit=max)
从这个电路中,创建了下面的编程逻辑。该逻辑旨在模拟汽车从任何障碍物转移。如果汽车距离障碍物不到 30 厘米,汽车必须打开 LED 并启动发动机,这样它才能改变方向。
当车辆远离物体时,即距离大于 30 厘米时,LED 将关闭。
#define echoPin 9
#define trigPin 8
long time = 0;
int measure = 0;
void setup()
{
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
time = pulseIn(echoPin, HIGH);
measure = time * 0.034 / 2; // Speed of sound wave divided by 2 (go and back)
if(measure <= 30)
{
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
}
if(measure > 30)
{
digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(3, LOW);
digitalWrite(2, LOW);
}
}该程序的操作非常简单。
最初,声明了超声波传感器连接引脚的名称,还声明了程序变量。代码部分如下所示。
#define echoPin 9
#define trigPin 8
long time = 0;
int measure = 0;接下来,我们声明 void setup 函数。此函数用于将引脚配置为 LED 的输入和输出以及超声波传感器的引脚。代码部分如下所示。
void setup()
{
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}之后,我们进入循环函数。首先,我们触发传感器的触发并将信号到达和返回的时间存储在时间变量中。代码部分如下所示。
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
time = pulseIn(echoPin, HIGH);计算好时间后,还要计算距离。使用下面的公式计算距离。
measure = time * 0.034 / 2; // Speed of sound wave divided by 2 (go and back)我们根据声音在空气中传播的平均速度计算距离,即 340 m/s。
我们将它除以 2,因为我们只需要与波之间的距离,因为计算出的时间等于声音通过空气返回和返回的时间。
最后,我们将检查机器人在任何障碍物处的距离范围。如果距离小于或等于 30,则驱动其中一个车轮并打开两个 LED,以指示它正在进行转向运动。
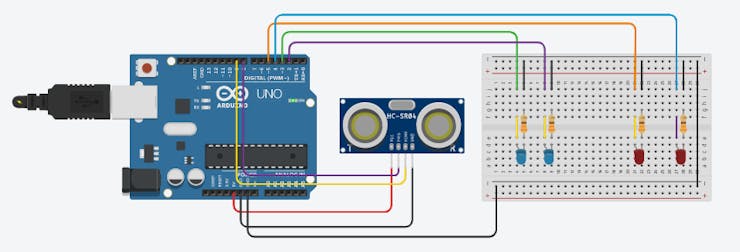
下图显示了 LED。
之后,我们就有了第二个条件。第二个条件检查距离值是否大于 30。如果为真,则打开两个电机(蓝色 LED)并关闭前照灯 LED。
这可以在下图中看到。
最后,在最后一次检查之后,代码流回到开头,一切都重新开始运行。
该项目是使用 JLCPCB 开发的,您可以在下面的主题中下载此文件。
所有文件都在下面的附件部分。
我们感谢JLCPCB的支持和合作,以低成本和可访问性生产项目。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉




全部0条评论

快来发表一下你的评论吧 !
