



梁宏满
分享资料个
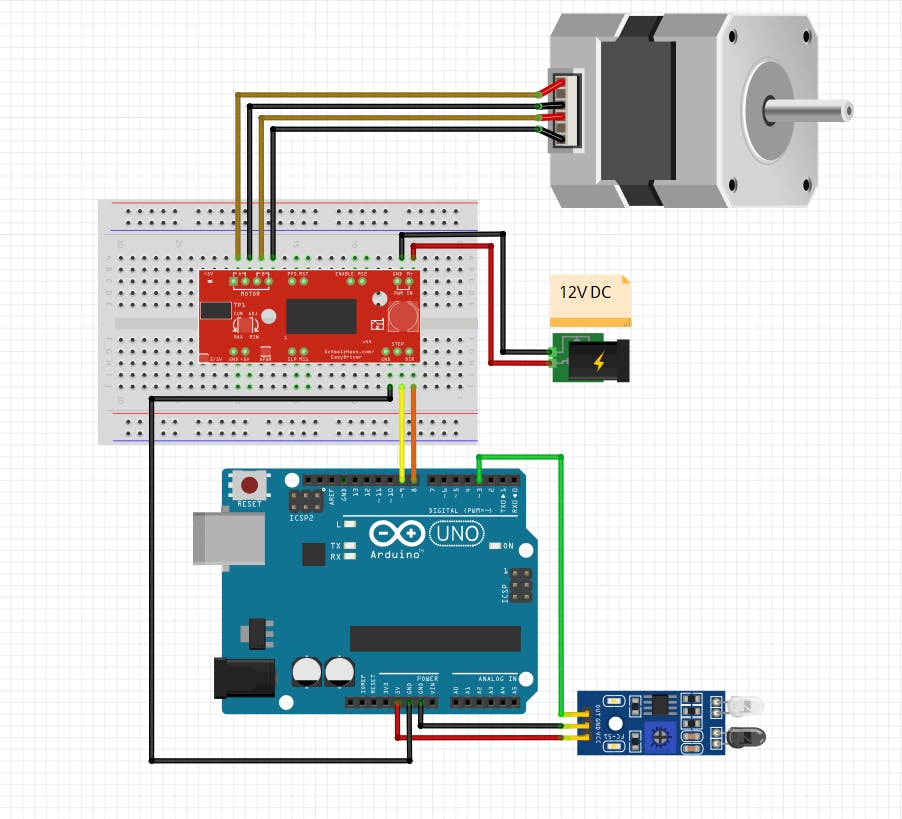
我设计这个项目是因为我需要解决旧模板机的问题。模板没有按照相同的轨迹进行,所以这就是我的项目的工作方式:
当传感器检测到模板轻微移动时,步进器启动并旋转杠杆,将模板重新定位在正确的轨迹上。
这可以通过删除 ! 在if (检测 != HIGH)
void setup() {
Serial.begin(9600);
pinMode(3, INPUT); //IR Sensor
pinMode(8, OUTPUT); // Stepper Direction
pinMode(9, OUTPUT); // Stepper Step
digitalWrite(8, LOW);
digitalWrite(9, LOW);
}
void loop() {
int detect = digitalRead (3);
if (detect != HIGH){
digitalWrite(9, HIGH);
delayMicroseconds(500);
digitalWrite(9, LOW);
delayMicroseconds(500);
}
else{
if(detect == LOW)
digitalWrite(9, LOW);
delayMicroseconds(500);
digitalWrite(9, HIGH);
delayMicroseconds(500);
}
}
*速度设置为500ms。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉




全部0条评论

快来发表一下你的评论吧 !
