

工业控制
上节介绍了MC_MoveSuperImposed功能块,可在一个基础运动,比如MC_MoveRelative或MC_MoveAbsolute的基础上,叠加一个增量式运动。叠加的运动可以被MC_HaltSuperImposed停止。
本节介绍MC_PositionProfile。与ECAT_motion_13:介绍的MC_VelocityProfile概念一致,只不过MC_PositionProfile执行基于Position Profile的定位控制。
2_功能及概念介绍
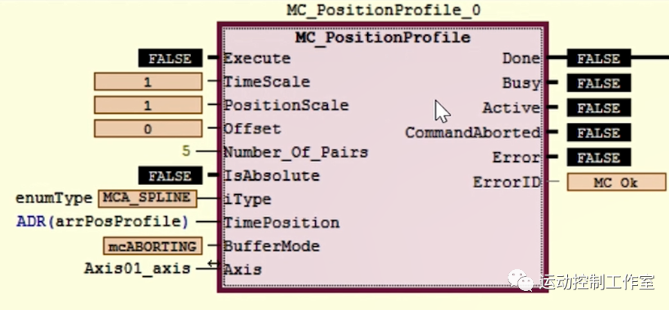
根据定义,此功能块的功能是:“Commands a time-Position locked motion profile”,即:基于时间和位置定义的位置曲线。
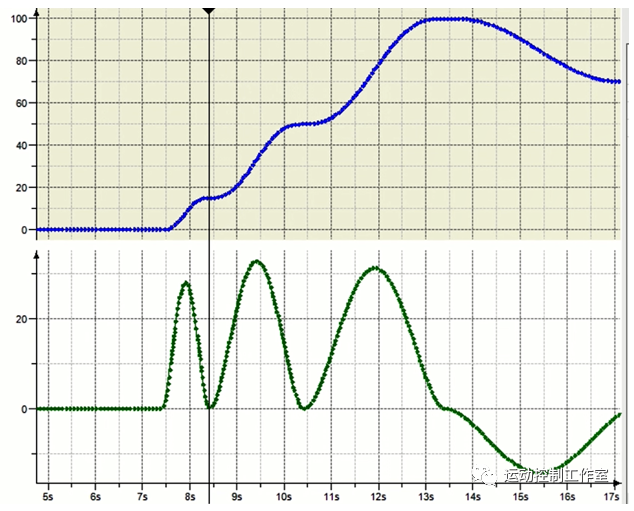
如上图蓝线所示,即为一个基于时间和位置的Motion Profile,其横轴为时间(s),纵轴为位置。
此曲线由5个关键点以及连接这5个关键点的曲线定义。
TimePosition输入:
在功能块上,这些关键点对应TimePosition输入,即结构体数组:arrPosProfile。
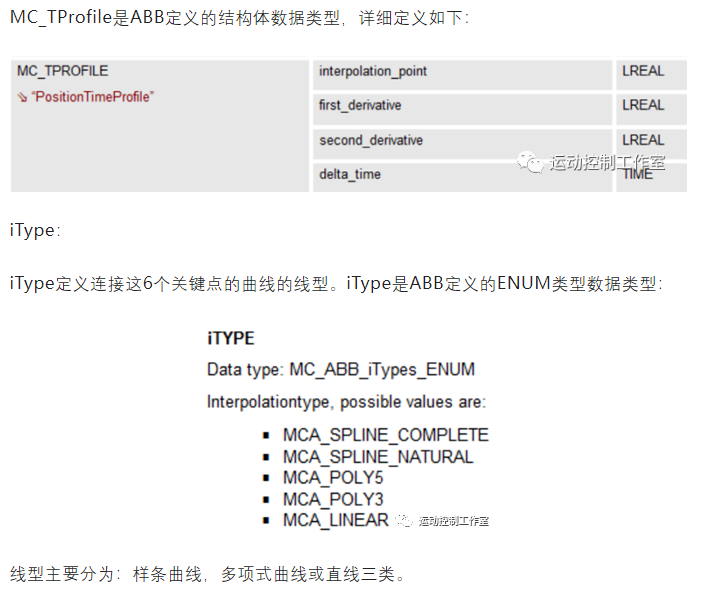
arrPosProfile中定义了6个元素,每个元素即一个关键点,每个关键点的数据类型是:MC_TProfile,用于定义某关键点的位置、时间、速度以及加速度。
Number_of_Pairs:
在进行实际控制时,可能结构体数组:arr_TProfile中定义了多个点,但运动曲线只是用前边的部分关键点,因此,功能块的输入:Number_of_Pairs选择使用几个关键点。
其它输入和输出的功能,可参见功能块的说明文档,相对比较容易理解。
PositionProfile与VelocityProfile的区别:
VelocityProfile中定义的MC_TProfile数组,其关键点的定义的4个元素为:速度、加速度、加加速度和时间。
PositionProfile中定义的MC_TProfile数组,其关键点的定义的4个元素为:位置、速度、加速度和时间。
另:因PositionProfile定义的是位置曲线,因此需定义其位置值是增量式还是绝对位置。
其它的概念都是相同的。
3_具体操作介绍
1.添加Action,在其中编程MC_PositionProfile功能块,并介绍程序的调用关系,以了解程序元素的调用关系。
结合功能块介绍各输入元素,如:iType,Time_Position输入数组,以及MC_TProfile结构体的概念。
2.介绍数组的初始化,与VelocityProfile中介绍的相同。
3.添加VISU并编译下载。
4.激活Axis Tracing,分析运行曲线。
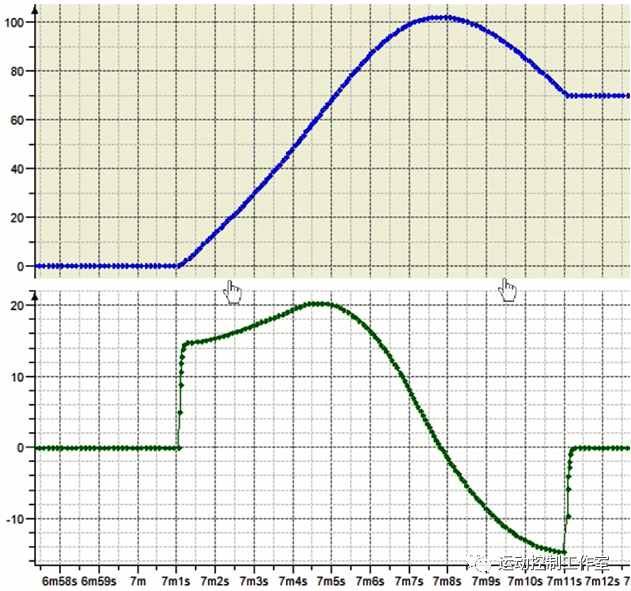
上文中展示的曲线为MCA_Poly5曲线。当把iType设置为MCA_Spline_Natural时,其曲线如下图:
全部0条评论

快来发表一下你的评论吧 !

