

我们聊过了LLC电路在调频模式以及移相控制下的一些特性,今天我们还是继续聊LLC电路,虽然这部分聊得不是很详尽,大家至少有些概念,能够在实际运用中有一些启发,足够了。 今天我们聊聊LLC电路的控制策略。
1LLC电路控制策略
LLC电路常数的控制方法包括:变频控制(Variable-Frequency Control,VFC)和定频移相控制(Phase-Shift Control,PSC)。
针对电动汽车直流充电桩需要较宽范围输出电压的要求,单独地采用一种控制是较难满足要求的,因此我们通常将两者结合起来(也就是两天我们讲到内容的结合)。
下面是调频移相混合控制策略结合的宽电压增益曲线:
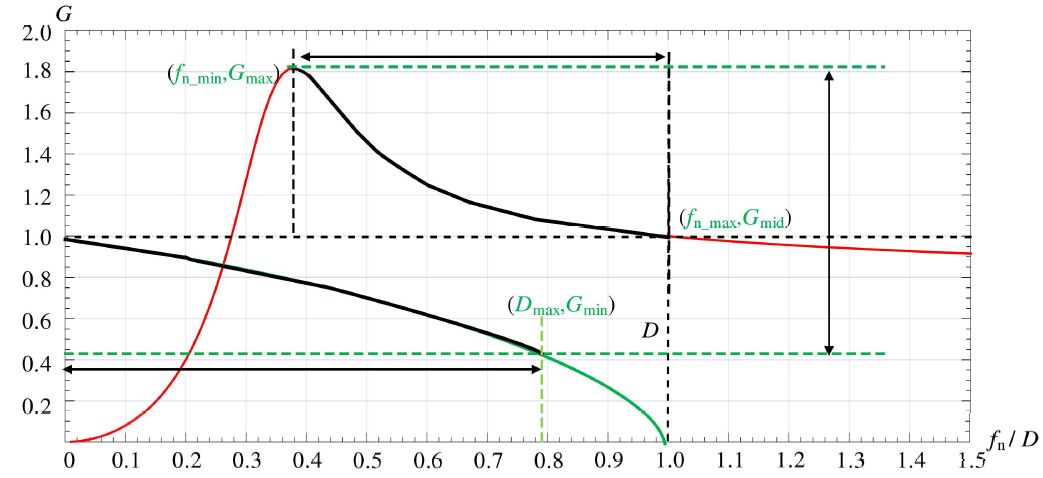
即调频模式下电压增益大于1,移相模式下电压增益小于1.当电路稳态运行时,根据输入输出电压的需求得到电路的增益,以此来判断控制类别。
在LLC电路的启动过程中,假设以第一谐振频率开始启动,在Lr和Cr谐振的过程中,此时的谐振电流的交流基频分量为:
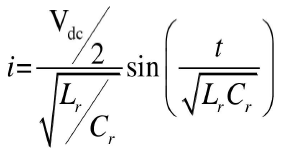
从上式可知,由于副边输出起始并没有建立电压,Lr和Cr上所加的电压会很大; 并且处于第一谐振点时Lr和Cr谐振的谐振等效阻抗为0,所以此时的启动电流最大,带来的好处是输出电压可以很快的建立起来,但是过大的冲击电流对开关管却是致命的。 为了降低电流的冲击,我们需要使启动时的工作频率远离第一谐振点。
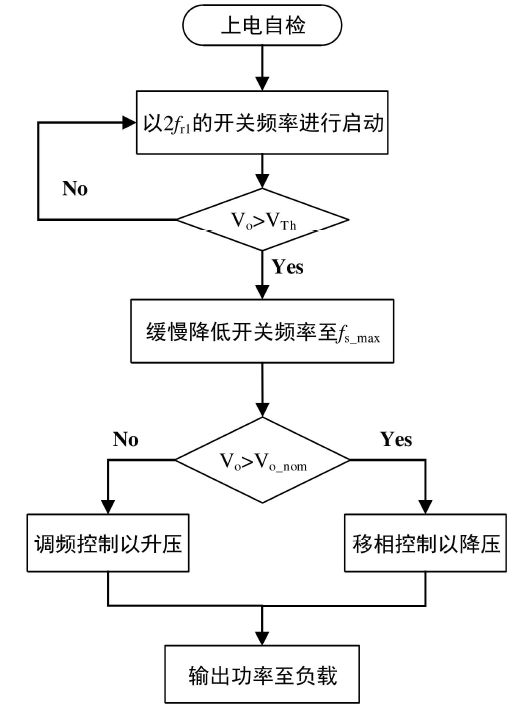
采用低于第一谐振点的频率启动时,此时Lr和Cr谐振时对外呈容性,不利于启动过程中开关管实现ZVS,所以LLC电路一般采用高频启动。
下面给出了LLC电路从启动到稳定输出的控制流程图:
2LLC的控制电路的设计
为了提高充电桩的输出功率,同时降低输出电压纹波,故后级采用两个半桥三电平LLC电路并联。 为了保证输出电压的稳定性,两个并联电路的控制电路需要共用一个电压环,电压环的输出经过电路分配器产生两路电流。 基于此类控制,在输出功率较小时,只有一路LLC电路工作; 当输出功率逐步增大时,另一路LLC电路才会慢慢开始工作,但两路被分配的电流取决于电流分配器。
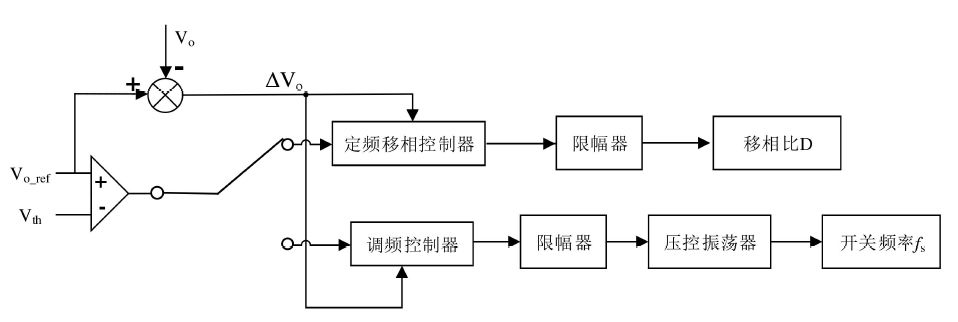
电流控制器的输出采用混合控制,当输出电压较低时,电路是固定频率的移相控制; 当输出电压较高时,电路为固定最大占空比的变频控制。 这样有利于实现开关管的软开关,提高电路效率。 下面是输出电压较高时的变频控制电路框图:

我们根据之前的分析,控制器是根据输出电压来做选择的。 当给定的输出电压大于转换电压时采用调频控制,否则采用定频移相控制。 故我们得到如下单个LLC电路的控制图:
此外,LLC电路常用的控制方法也可以分为单电压环控制和电压电流双环控制。 其中前者比较简单,参数也比较容易确定; 而后者双环控制具有谐振电流可控,动态特性较好的特点。 下面我们简单地介绍一下两种控制(我们以模拟电路的方式来说吧,这样直观一点,补偿和控制也比较容易。 数字控制中只要相应的离散化就OK了)。
3单环控制
单电压环控制在实际中我们常选择PID控制,无论是移相还是调频模式下,控制器的输出越大,意味着输出的频率或者移相角越大,则对应的输出电压越小,则我们可以知道其呈现正反馈特征。 下图是LLC单电压环PID控制简单电路图:
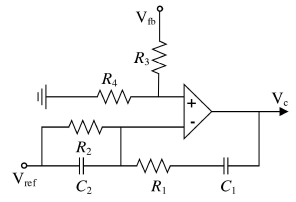
我们可以得到输出和反馈的关系如下:

该控制器的比例常数为(C2/C1)+(R1/R2),积分常数为1/(R2C1),微分常数为R1C2。 根据开环传递函数的特性对其进行相应的补偿,其中比例环节影响系统的稳态误差和输出精度; 积分环节可以提高系统的稳态性能,确保系统的无差输出; 微分环节可以提高系统的稳定性,但是不能单独使用,否则会放大电路的噪声信号。
4双环控制
双环控制模拟电路如下:
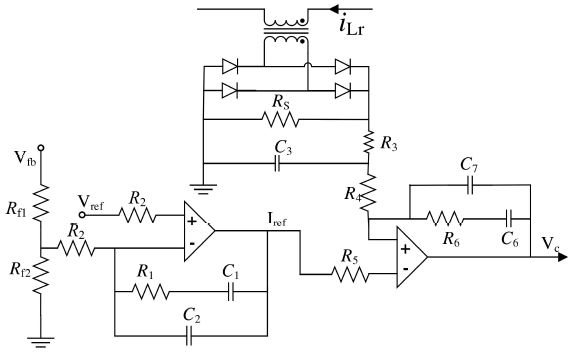
我们为了简化电路的参数整定,采用单极点-单零点补偿网络。 电流选取为谐振电流经过整流采样后的平均值,电压环的输出作为谐振电流的平均值的给定。
从上图我们可以得到电压环的传递函数为:
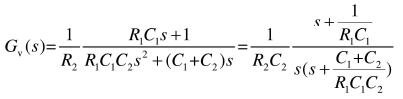
其中,C1>>C2,直流增益和零极点频率分别为:

以上我们可知,电压环为负反馈,电流环为正反馈。 当输入电压提高或者负载增大导致输出电压下降,则Vfb降低,电压环输出升高,即电流的给定增大; 电流环的反向输入端增大,正的电流环输出减小,即频率或者移相角降低,输出电压升高,这样一个闭环。
关于LLC电路的调频和移相相结合的控制策略我们就聊到这里,希望你们能够喜欢。
全部0条评论

快来发表一下你的评论吧 !

