

随着空间系统开发人员不断努力减小关键模块和元件的尺寸、重量和功率,他们还需要更高性能、抗辐射和耐辐射的组件来增强系统设计。新技术 - 例如更轻,更高集成的卫星电机控制电路 - 可以承受极端空间环境并优化航天器性能。
LX7720航天器电机驱动器经过设计,经过抗辐射处理。它是空间场可编程门阵列(FPGA)的配套集成电路(IC),例如Microchip的RTG4 FPGA和RT PolarFireÒ FPGA,或空间微控制器(MCU),例如Microchip的SAMRH71F20或SAMV71Q21RT。LX7720 中集成了电流检测器、旋转变压器、编码器和霍尔效应编码器接口,减少了电路板空间和重量,同时提高了使用线圈电流反馈和转子位置传感的闭环电机控制的可靠性。
这是LX6的电机驱动器和电流检测电路的八部分系列文章中的第7720篇博客,从场效应晶体管(FET)驱动器和电流检测级内的模块理论开始,然后是如何选择外部元件,最后是无刷直流、双极和单极步进电机的实际实现。本系列的主题包括:
1. 介绍半桥驱动器,并讨论用于为每个高边N沟道场效应晶体管(NFET)产生独立栅极电源的电荷泵方法
2. 使用标准栅极电压和低栅极电压NFET的实用半桥驱动器级
3. 电机绕组电流检测放大器简介
4. 在半桥级内应用电流检测放大器的拓扑选择
5. 将半桥分离为独立的低边和高边驱动器
6. 将 LX7720 连接到无刷直流电机 (BLDC) 或永磁同步电机 (PMSM),带可选的电磁制动器
7. 将LX7720连接到双极步进电机
8. 将LX7720连接到一个或两个单极步进电机
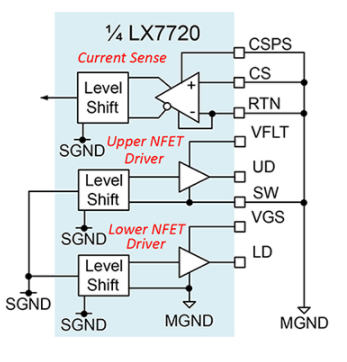
LX7720包含1个带浮动电流检测的半桥驱动器,用于电机线圈驱动,7720个用于检测霍尔效应传感器和旋转编码器的双电平输入(比较器),以及一个完整的旋变器/LVDT接口,带初级线圈驱动器和次级信号调理。图<>显示了使用LX<>的典型电机驱动系统的顶层框图,并说明了在一个IC中集成闭环电机驱动器的所有混合信号电子器件的好处。
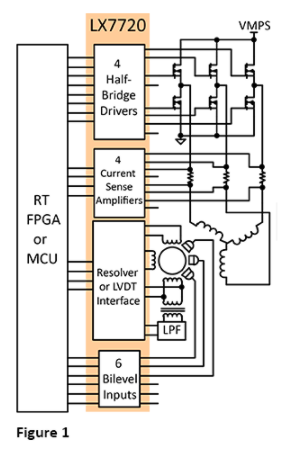
图1.使用LX7720的典型电机驱动系统
之前的博客讨论了LX7720半桥级和集成电流检测的基本原理。本博客讨论将LX7720与无刷直流电机配合使用。
LX7720包含四个半桥驱动器级和四个电流检测放大器,足以驱动三相PMSM或无刷直流电机(BLDC)。永磁同步电机和 BLDC 都是基于永磁体的电机,转子上有永磁体。定子包含等间距的星形或三角形连接绕组,三个用于三相电机。永磁同步电机和 BLDC 电机设计在细节上有所不同,在驱动波形(正弦与梯形/三角形)方面也有所不同。但是,就半桥驱动器级而言,基本架构是相同的。
图2显示了一个通用三相电机,由三个半桥驱动器驱动,每个半桥驱动器输出中都有电流检测。电机显示为星形(或星形)定子绕组类型,但与三角形定子绕组的电机的连接是相同的。
LX7720电路经过简化,省略了电流检测和栅极驱动部分的电源和去耦。关键部件是三个半桥和电流检测。
所有三个绕组驱动器的相位输出均具有电流检测功能。但是,由于进入一个相位的电流必须通过其他两个相位退出,因此只需要两个电流检测。第三相电流由其他两者的总和计算得出,如果需要,可以测量以提供冗余。
半桥FET及其集成体二极管所示。与FET并联的二极管是在半桥FET关断时承载换向电流的必要元件。FET关断后的电流换向在第4篇博客中讨论。FET 体二极管通常由分立二极管并联,以实现更高的开关速度和更低的压降。电机绕组电流通过半桥 FET 和/或与 FET 并联的换向二极管的某种组合在电机电源 VMPS 和电机接地 MGND 之间流动。
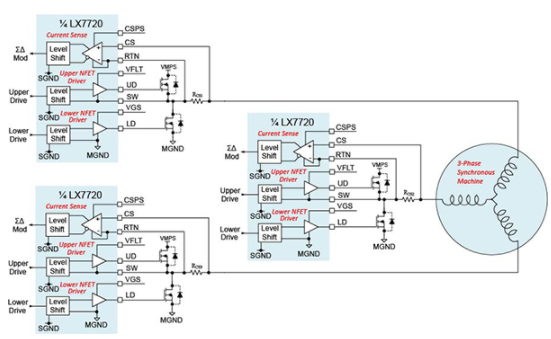
数字 2. 具有相位输出电流检测功能的三相电机驱动器
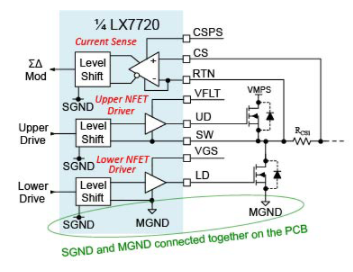
LX7720使用两个内部接地域,如图2所示,分别是信号地(SGND)和电机接地(MGND)。SGND用于数字和模拟信号(控制电路)。MGND用于与外部半桥相关的电路 - FET驱动器、电流检测和电机负载本身。电平转换器管理地面域的交叉。
如果电机控制器板设计将电机驱动电源部分(半桥和换向二极管)与 LX7720 位于同一 PCB 上,则 SGND 和 MGND 两个接地应直接在 PCB 上连接在一起,因此将具有相同的电位(图 3)。
数字 3. 连接LX7720的两个接地域,SGND和MGND
对于高功率电机设计,不在控制器PCB上布线VMPS高电压和/或高电流路径可能更实用。在这种情况下,电源开关元件将位于单独的模块或 PCB 上,通常靠近电机(图 4)。在这种分离式架构下,电机电源VMPS及其相关的接地回路PGND通过线束采用单独的路径连接到半桥FET。
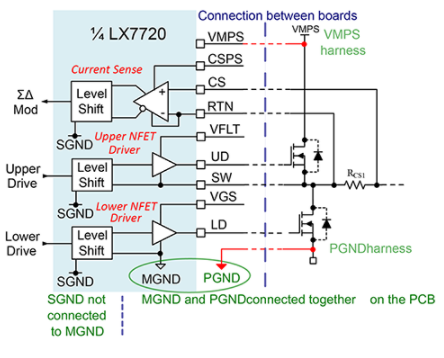
数字 4. 与分离电机接地的连接
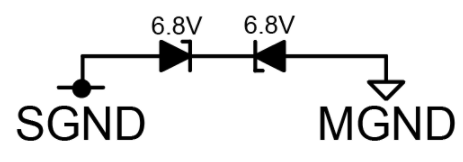
LX7720仍然需要连接到电机电源VMPS,因为这是第一篇博客中讨论的高端FET驱动器的参考。LX1还可以进入半桥驱动器的地面。这两个信号互连在图7720中以红色显示。请注意,现在SGND不直接连接到MGND,而是依赖于LX4所在的PCB外部的系统接地路径。但是,由于电机的电源线承载大电流电机波形,因此PGND/MGND和LX7720的信号GND(SGND)之间会出现接地反弹。MGND和SGND之间的允许电位差为-7720V至+10V。如果对终端系统的分析表明在瞬变期间可能会超过此值,则SGND和MGND之间的背靠背齐纳二极管对可能足以箝位这些现象(图8)。
数字 5. 用背靠背齐纳二极管箝位SGND和MGND。
同步电机也可提供三相以上。由于LX7720中的半桥和电流检测级是独立的,因此可以一起使用多个LX7720来控制具有四相以上电机。
对于三相电机,LX7720提供一个备用半桥级。第5篇博客讨论了将半桥分离为独立的低边和高边驱动器,并具有可选的电流检测。然而,螺线管或电磁制动器等负载通常由脉宽调制(PWM)波形驱动,以调节电流,从而调节机械力。然后,可以通过监控感性负载中输出电流的上升和下降,逐周期调整PWM时序。
当负载开关关闭时,需要一个二极管来为感性负载提供斜坡下降的路径。图5所示电路显示了一个具有高端电流检测功能的低侧驱动器。所有负载电流都通过电流检测电路,无论是在开关导通时通过FET斜坡上升,还是在开关关闭后通过二极管斜坡下降。
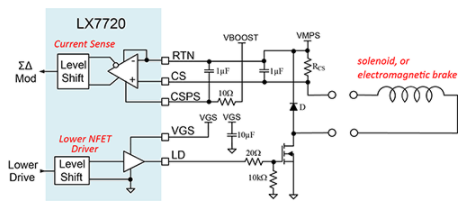
数字 6. 带电流测量的低侧感性负载驱动器
图6所示的替代配置是具有低侧电流检测的高边驱动器。电流检测可以由备用ADC输入(如果系统中可用)执行。在这种情况下,只需一个备用LX7720半桥部分即可构建两个负载驱动器,从而为低侧驱动器保留LX7720的电流检测模块。
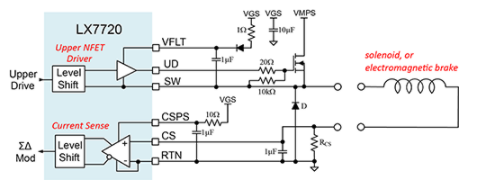
数字 7. 带电流测量的高边感性负载驱动器
这两个驱动程序有两个缺点。首先,需要两根电线来连接负载。其次,二极管D是相对有损耗的。只需使用完整的备用半桥来驱动负载,电流检测位于输出端即可消除这两个限制(图 8)。高端FET驱动负载,低侧FET用作有源二极管。如图2所示,额外的半桥的配置方式与用于电机的其他三个半桥相同,但功率组件的细节可能存在差异。
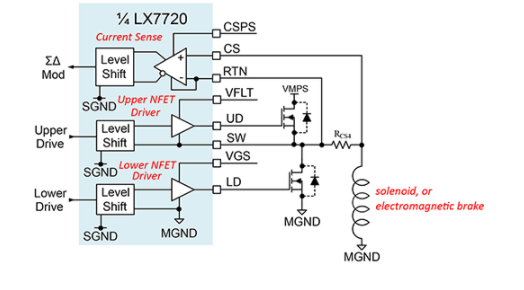
数字 8. 带输出电流测量的半桥感性负载驱动器
有一个警告要记住。VGS栅极驱动电源引脚和VMPS电机电源引脚是LX7720内所有四个半桥通用的。这意味着电磁阀或电磁制动器必须使用与电机相同的 VPMS 和 VGS 电源,并具有三个备用电路。
最后,图6显示了如何连接未使用的半桥驱动器或电流检测放大器。
数字 6. 连接未使用的半桥驱动器和/或电流检测
结论
您现在应该了解如何将 LX7720 连接到 BLDC 或 PMSM,以及如何使用第 4 个半桥级来驱动电磁阀或电磁制动器。
审核编辑:郭婷
全部0条评论

快来发表一下你的评论吧 !

