

工业控制
前言
本章节采用龙伯格观测器进行永磁同步电机的无传感器控制,首先分析了龙伯格观测器的原理,然后设计了PMSM的全阶龙伯格观测器,最后通过Matlab/Simulink对该观测器方案进行仿真分析,为了进行对比分析在Matlab/Simulink中也搭建了基于MICROCHIP AN2950的低阶龙伯格观测器。
一、龙伯格观测器
1.1.龙伯格观测器的原理
上一章节分析了滑膜观测器,并引入了状态观测器的概念。介绍了什么是状态观测器,并对状态观测器增加反馈,通过反馈来不断的修正状态观测器的输出,使状态观测器尽可能的接近真实电机,如下图所示:
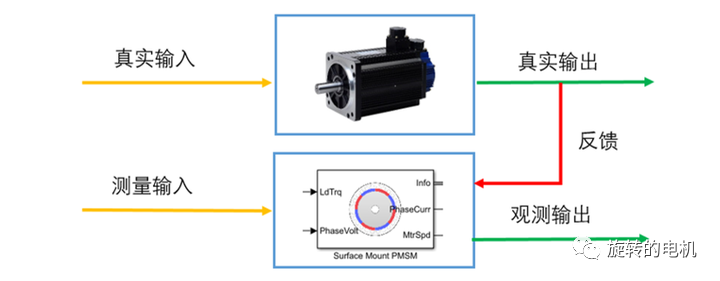
反馈方式与修正方式的不同产生了不同种类的状态观测器。
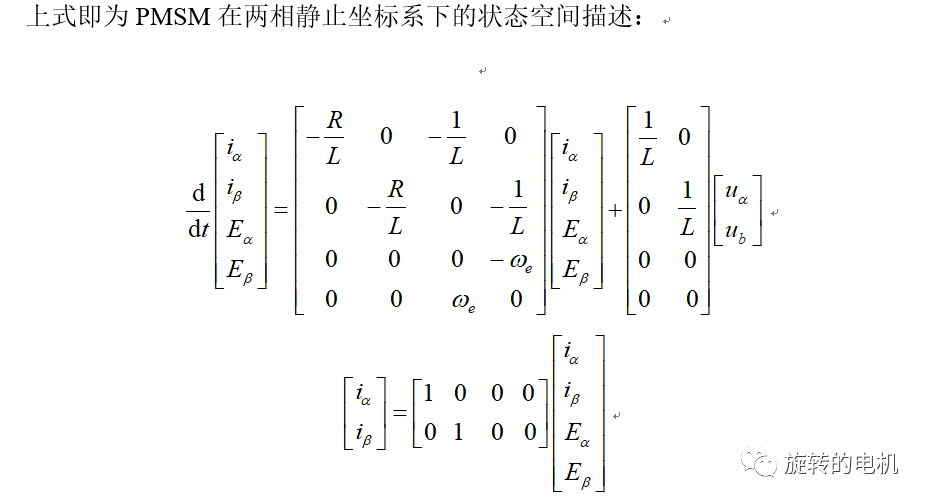
现代控制理论中实际系统的状态空间表达式为:

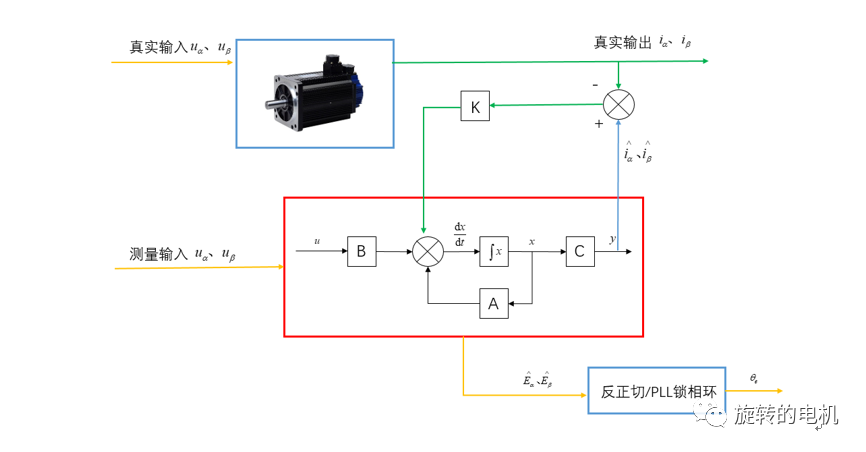
龙伯格观测器不同于滑膜观测器的简单结构,该观测器完全依托于上述状态空间表达式。我们用状态空间表达式的形式建立用于描述电机的数学模型,并引入反馈。通过反馈不断的修正龙伯格观测器的状态,从而使观测器不断的接近真实电机。龙伯格观测器的结构如下图所示:
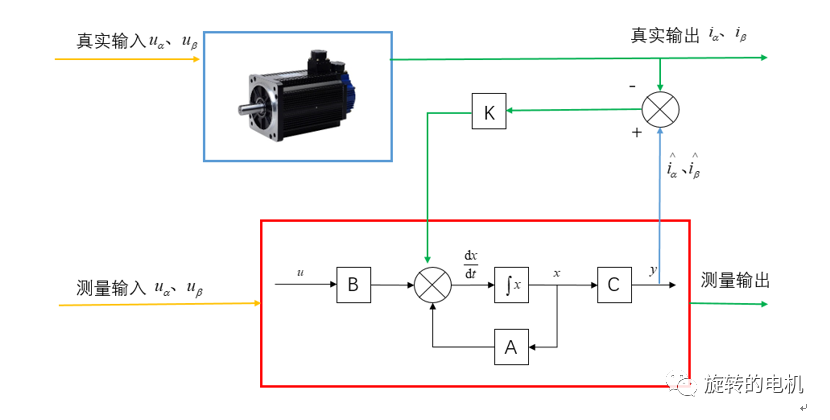
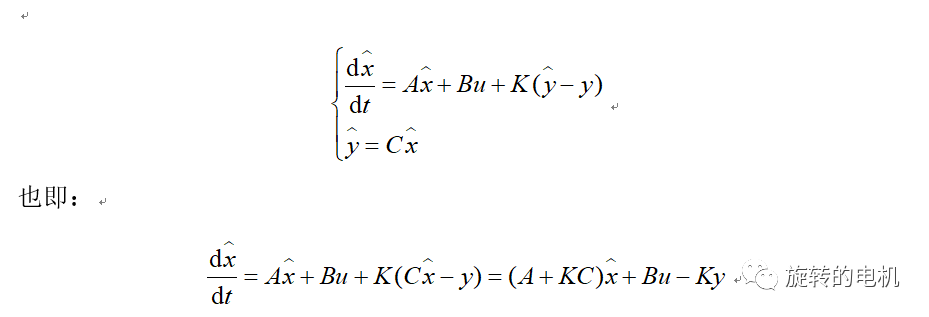
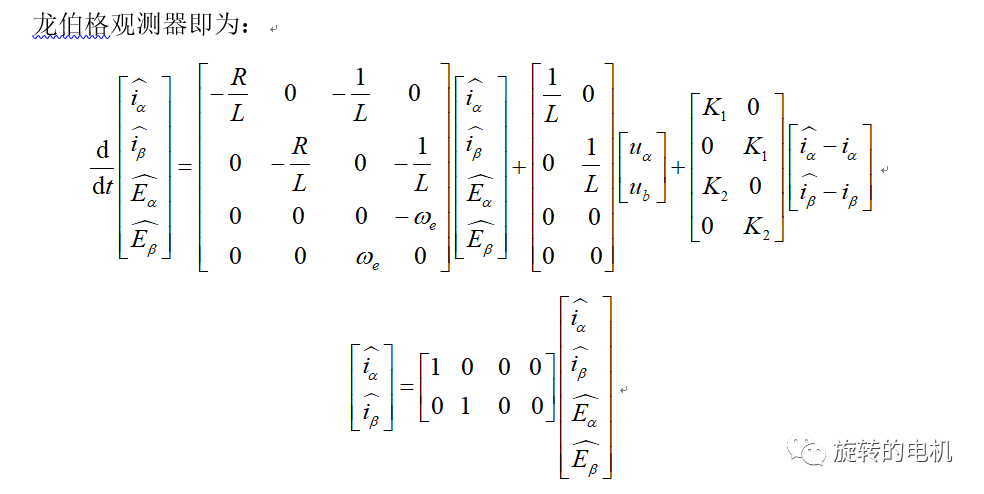
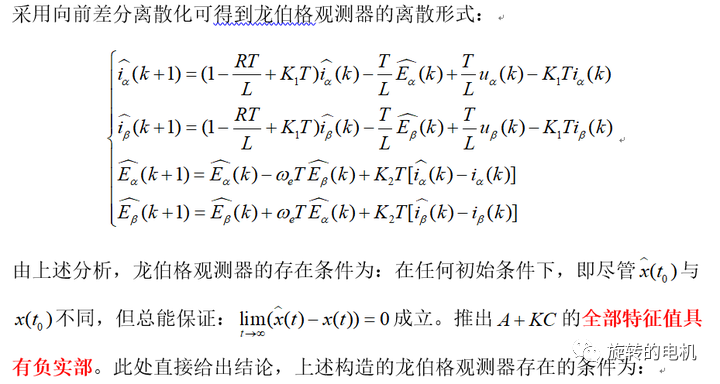
龙伯格观测器的一般表达式如下所示:
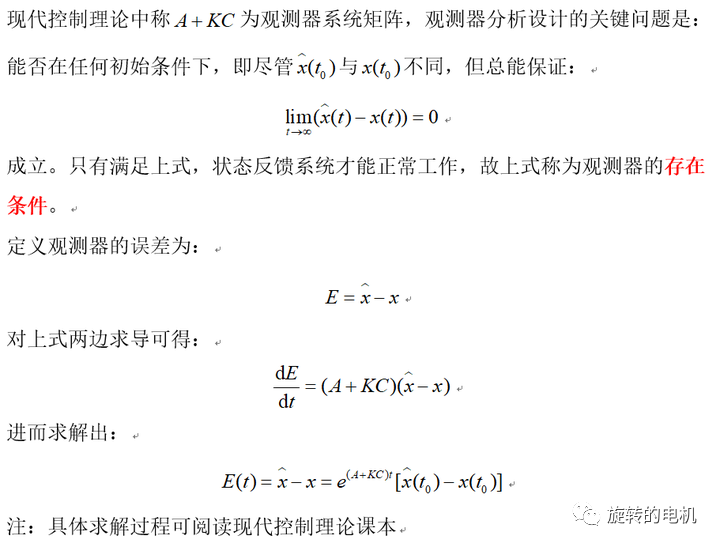
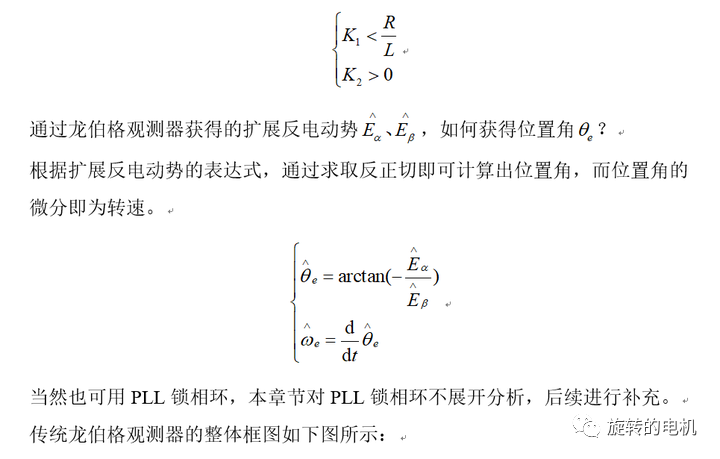
1.2.龙伯格观测器的误差
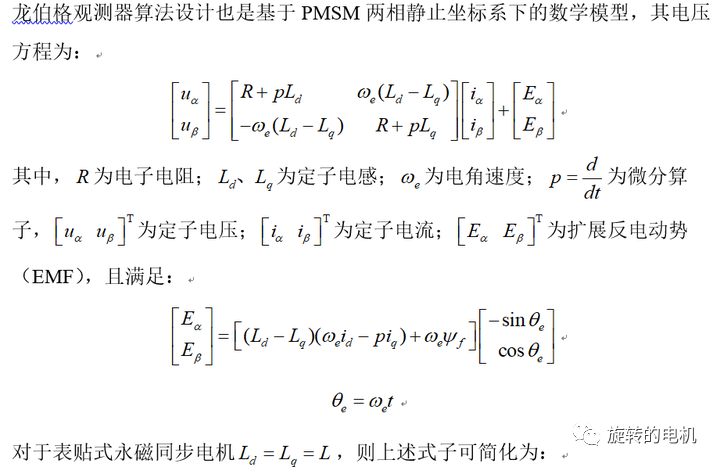
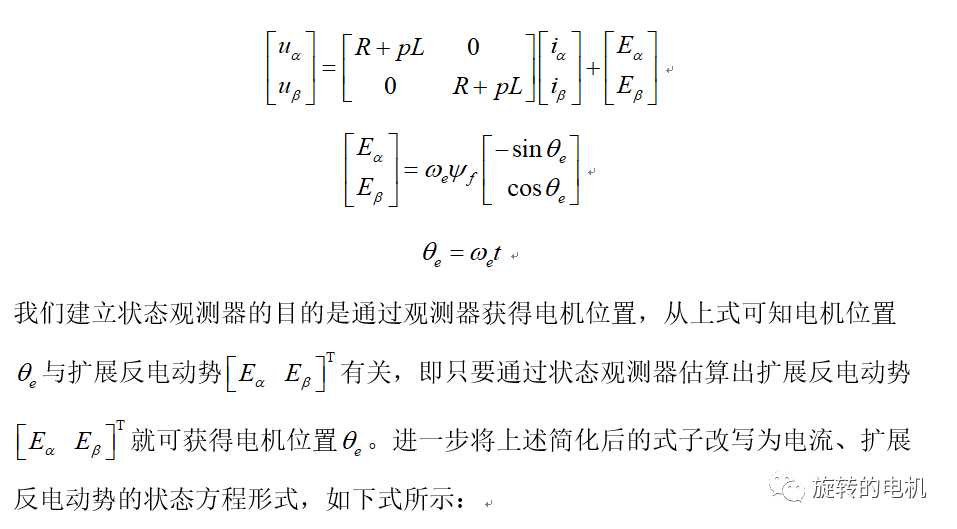
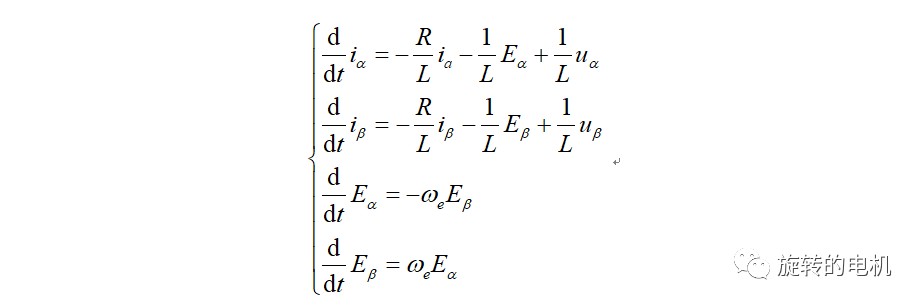
1.3.PMSM龙伯格观测器的建立
二、Matlab/Simulink仿真分析
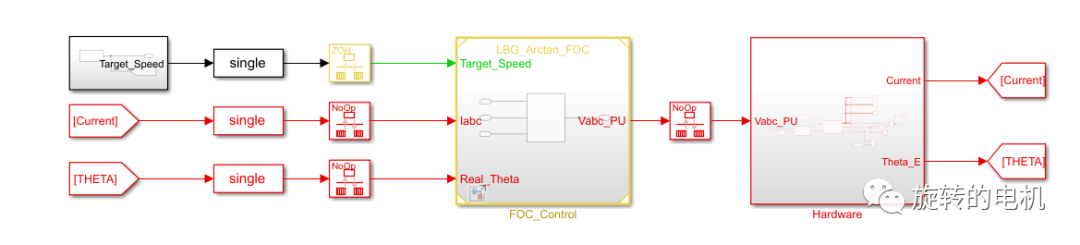
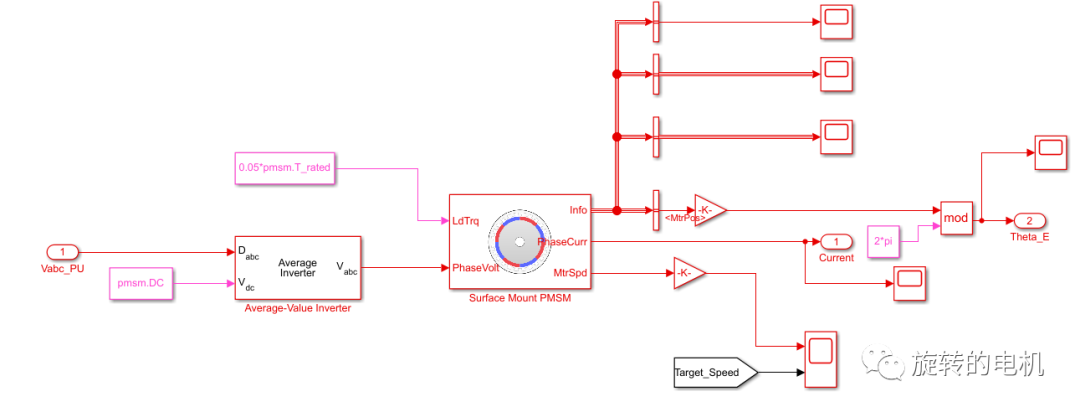
上图为PMSM基于龙伯格观测器的无感控制整体框图,为了后续模型生成代码进行工程实现,本示例将控制算法部分单独建模,通过调用控制算法模型进行PMSM的控制。
2.1.仿真电路分析

为了后续模型生成代码加载到底层进行工程实现,本示例建立了三个不同时间的调度任务。
10ms任务:用于电机控制模式的切换,本示例采用经典的三段式启动方式,即转子预定位、IF开环启动、开环切闭环进行无感控制。
速度环控制:相较于电流环速度环对实时性要求不高,带宽一般为电流环带宽的1/20,本示例将速度环设置为2ms任务。
电流环控制:电流环对实时性要求高,带宽高时间设置为FOC的执行时间50us。
2.1.1 电机控制模式切换10ms任务
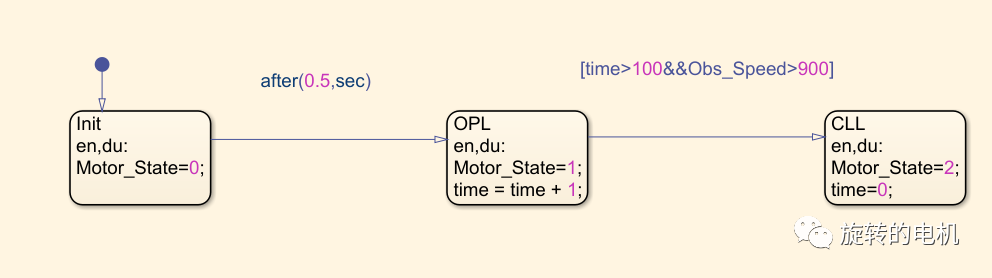
设置转子预定位持续时间500ms;500ms后切换为IF开环控制;如果IF开环启动时间大于1s且此时的观测速度大于900RPM,则切换到无感闭环控制。
2.1.2 速度环控制2ms任务
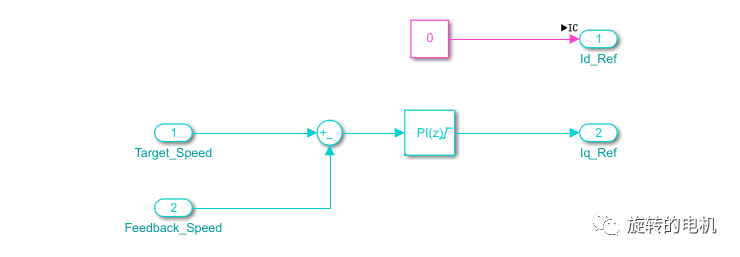
只有在无感闭环控制模式才用到速度环。
2.1.3 电流环控制50us任务

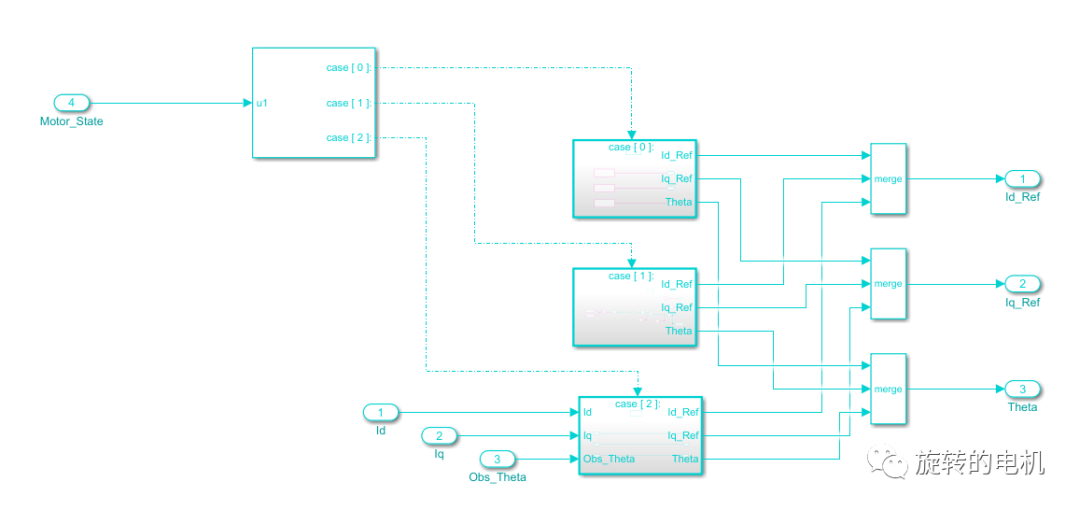
控制模式切换:
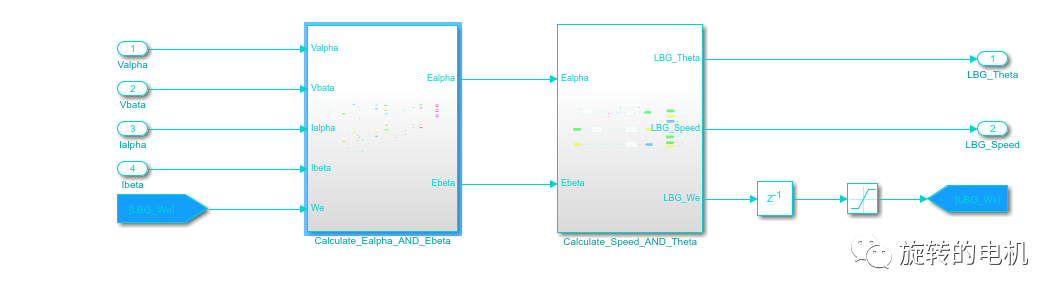
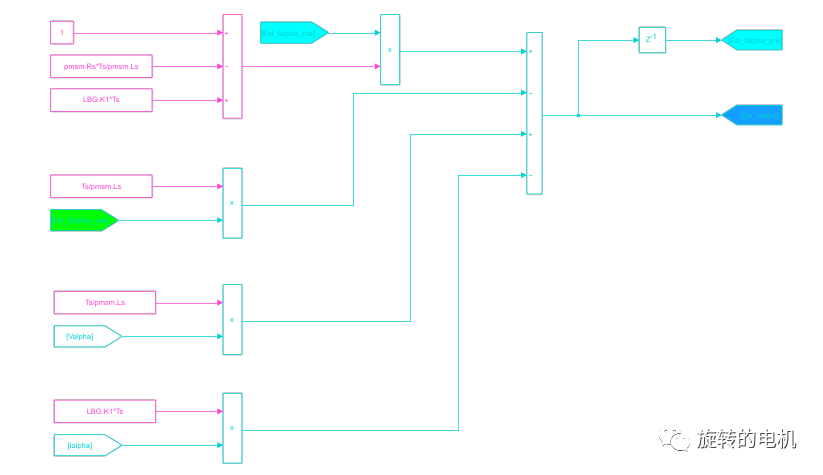
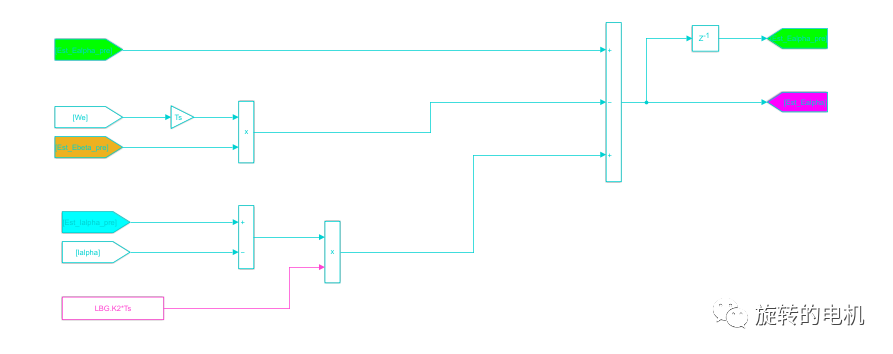
龙伯格观测器:
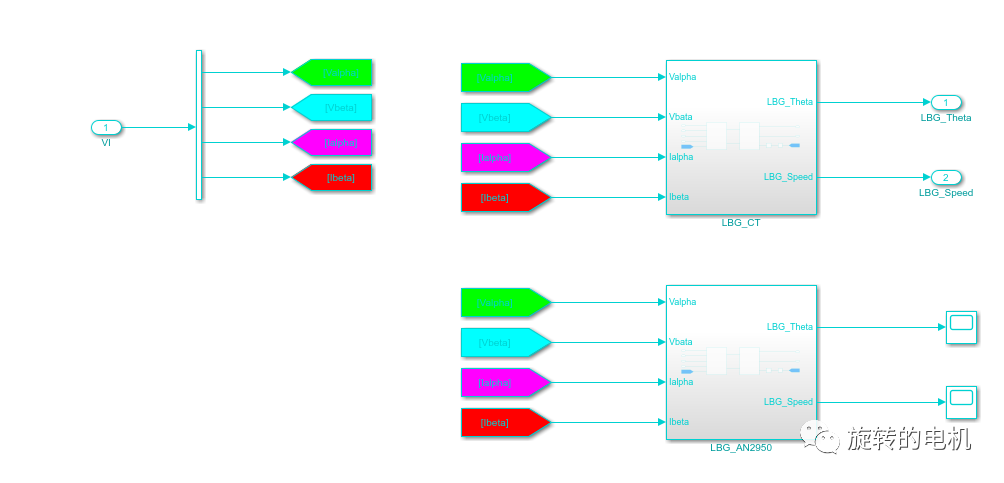
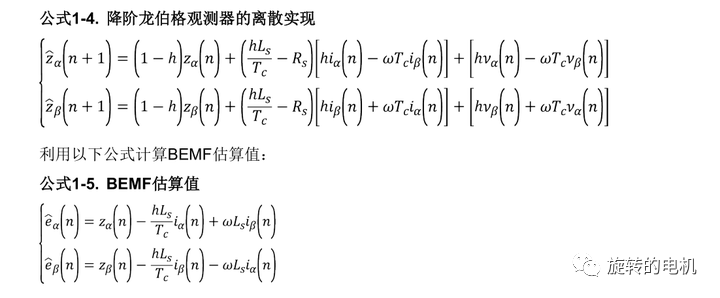
该示例搭建了上述推导的全阶龙伯格观测器,并且为了进行对比,参考了MICROCHIP AN2950同时搭建了降阶龙伯格观测器,AN2950降阶龙伯格观测器方案如下:
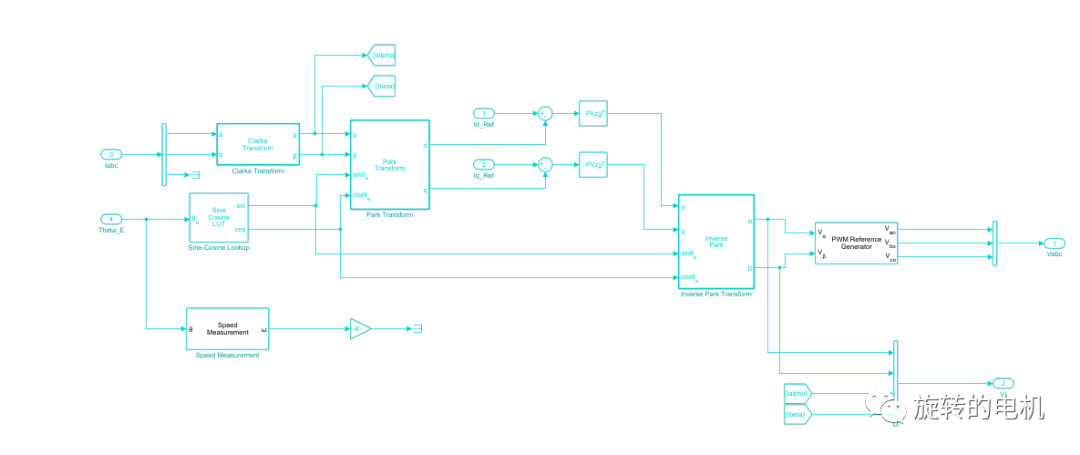
FOC电流闭环:
2.1.4 电机主电路
2.2.仿真结果分析
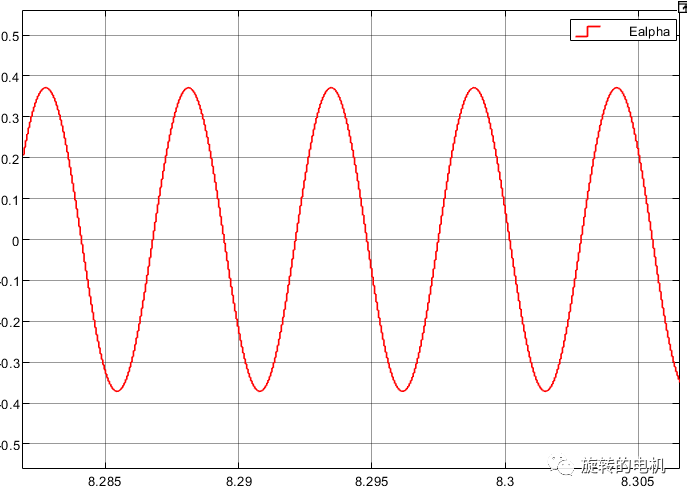
全阶龙伯格观测器反电动势观测值:
降阶龙伯格观测器反电动势观测值:
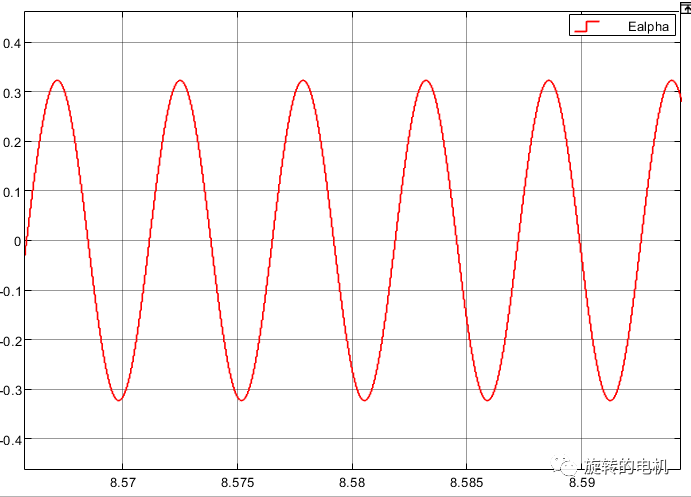
由仿真结果,全阶龙伯格观测器和降阶龙伯格观测器都得到了很好的观测结果。
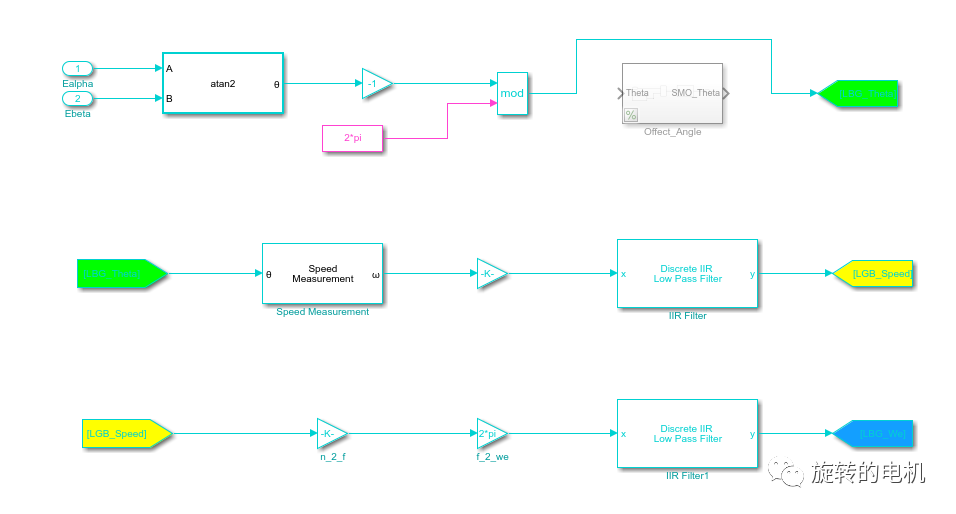
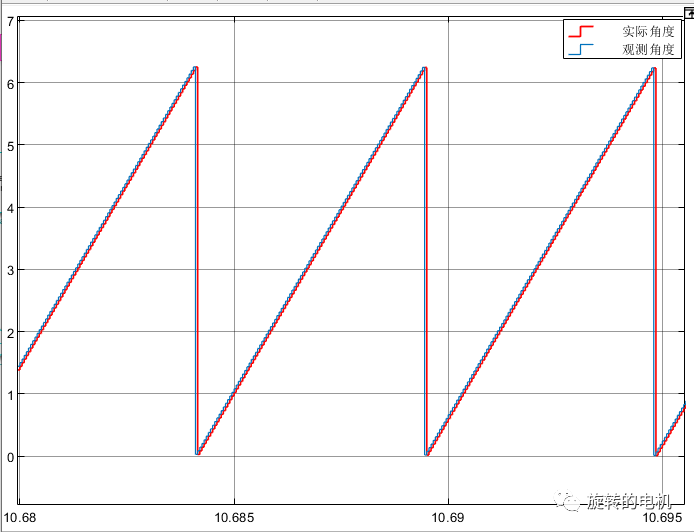
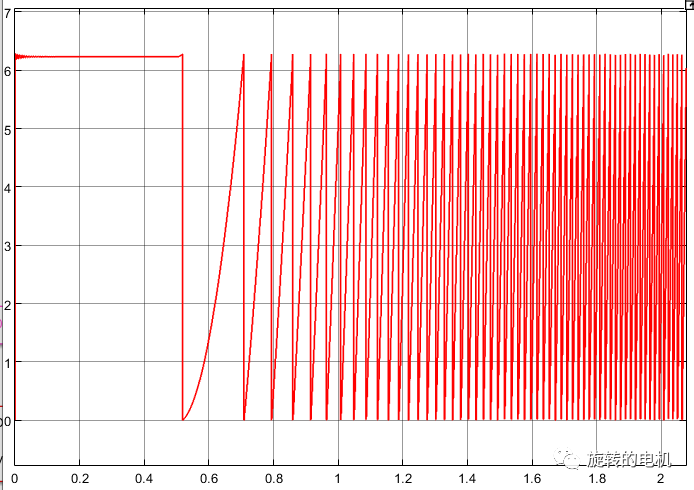
实际角度与龙伯格观测角度:
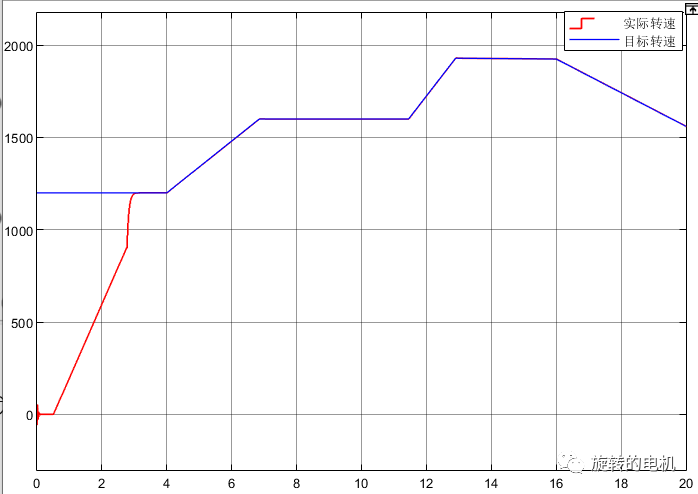
电机转速:
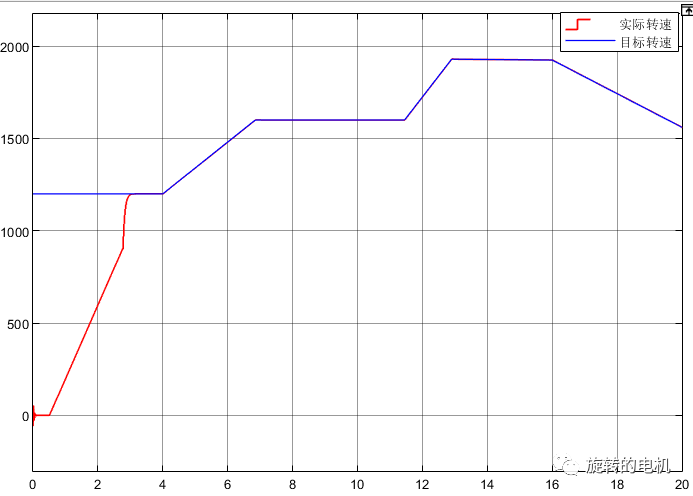
0~0.5s执行转子预定位:
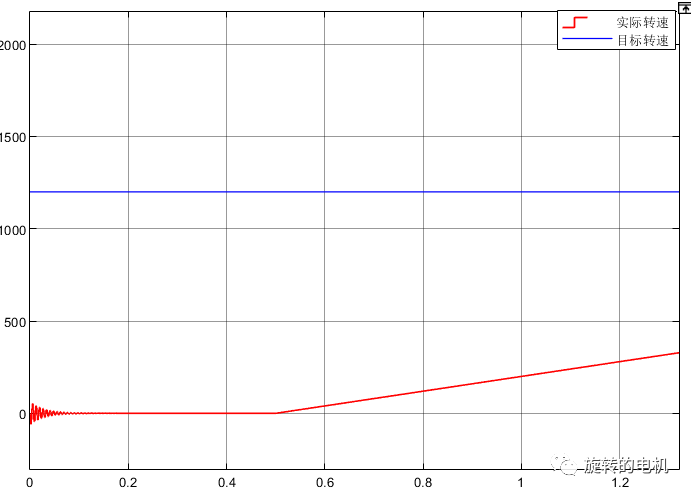
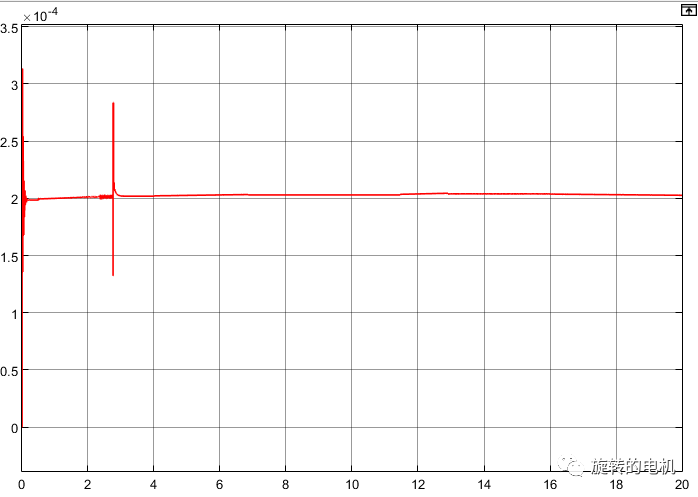
0.5s~2.76s为IF开环启动:
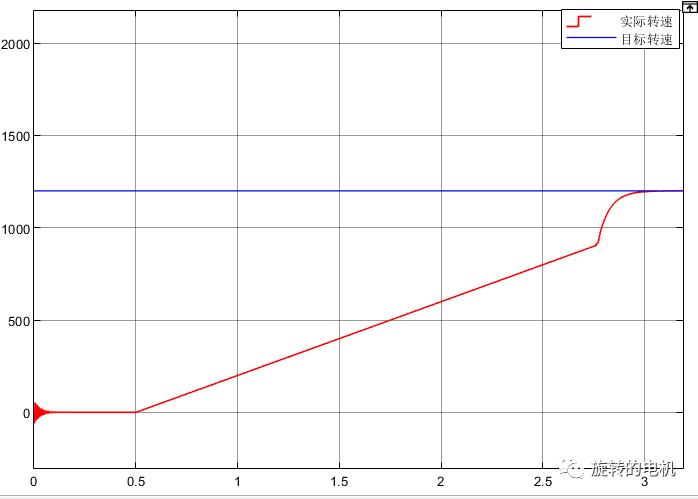
2.76s~20s为无感闭环控制
电机定子电流:
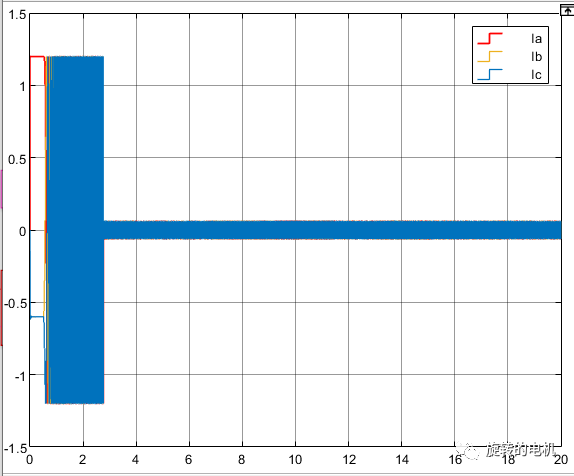
电机实际转子位置:
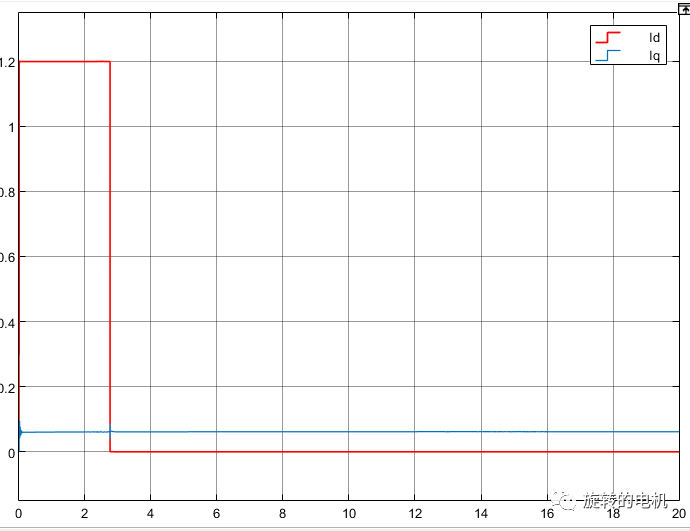
同步旋转坐标系下的定子电流Id、Iq:
同步旋转坐标系下的定子电压:
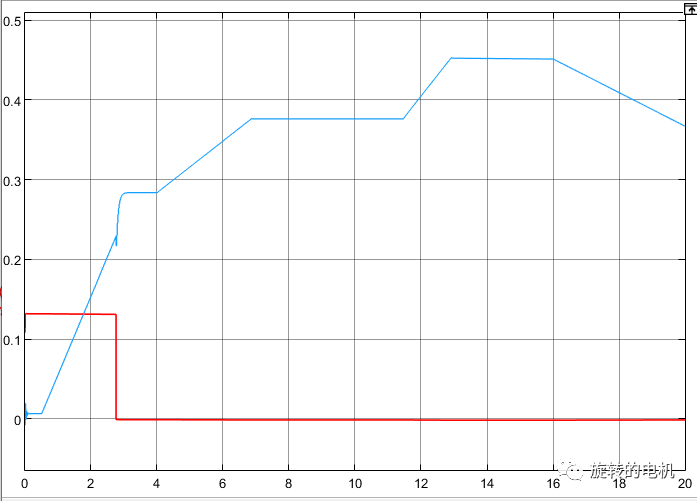
电磁转矩:
总结
本章节采用龙伯格观测器进行永磁同步电机的无传感器控制,首先介绍了龙伯格观测器的原理,然后设计了PMSM全阶龙伯格观测器,最后通过Matlab/Simulink对该方案进行了仿真分析,为了进行对比分析在Matlab/Simulink中也搭建了基于MICROCHIP AN2950的低阶龙伯格观测器。
全部0条评论

快来发表一下你的评论吧 !

