



吴湛
分享资料个
早在 2016 年的某个时候,我就开始了一次制造六足机器人的迂回之旅。大约一年前,我已经停止为OSH Park工作,并且正在从事一个更“企业化”的客户项目。这个项目很有趣,但我想念电子产品。我也怀念我以前的爱好,即建造(主要是坠毁的)无线电遥控直升机,当我的孩子出于时间/成本原因来到我的生活时,我放弃了它。
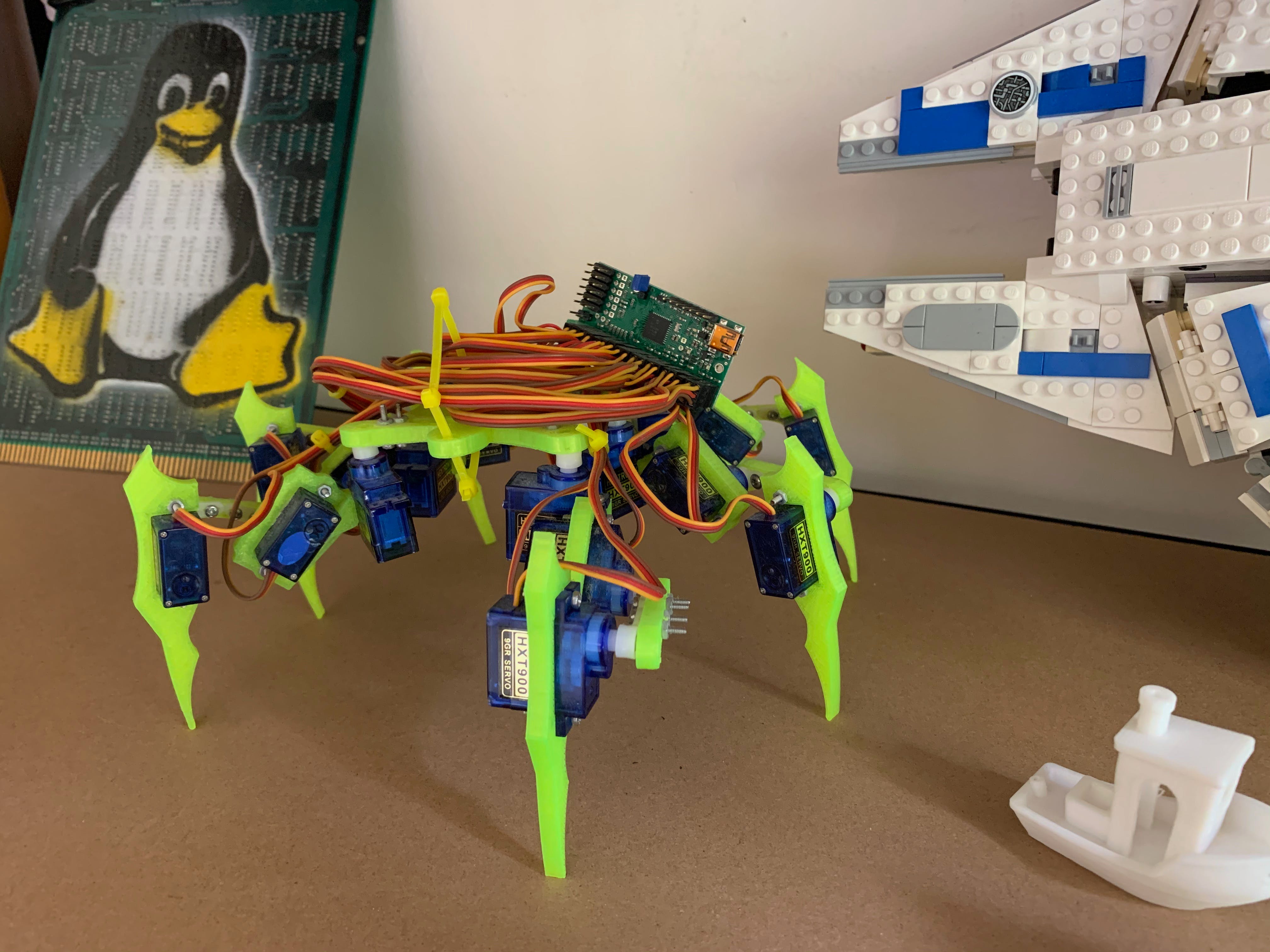
我认为,在这些不同的技能之间,我有足够的工作知识,可以在业余爱好机器人技术领域发挥作用。我首先在新西兰国家图书馆 Te Puna Mātauranga o Aotearoa打印了这个六足动物,不幸的是,该图书馆停止了 3D 打印服务。我从 HobbyKing买了一堆3 美元重 9 克的伺服系统,然后开始组装它。对我来说不幸的是,组装好的设备太小太脆弱,无法承载我希望装入其中的电子设备,而且构建公差太宽松,无法轻松编写可重复的姿势。简而言之,我就是不开心。
在某个时候,我还幻想自己骑着六足动物在城里转悠。可能是在和我的孩子们一起看了 Big Hero 6 之后 - 这个机器人不会削减它。
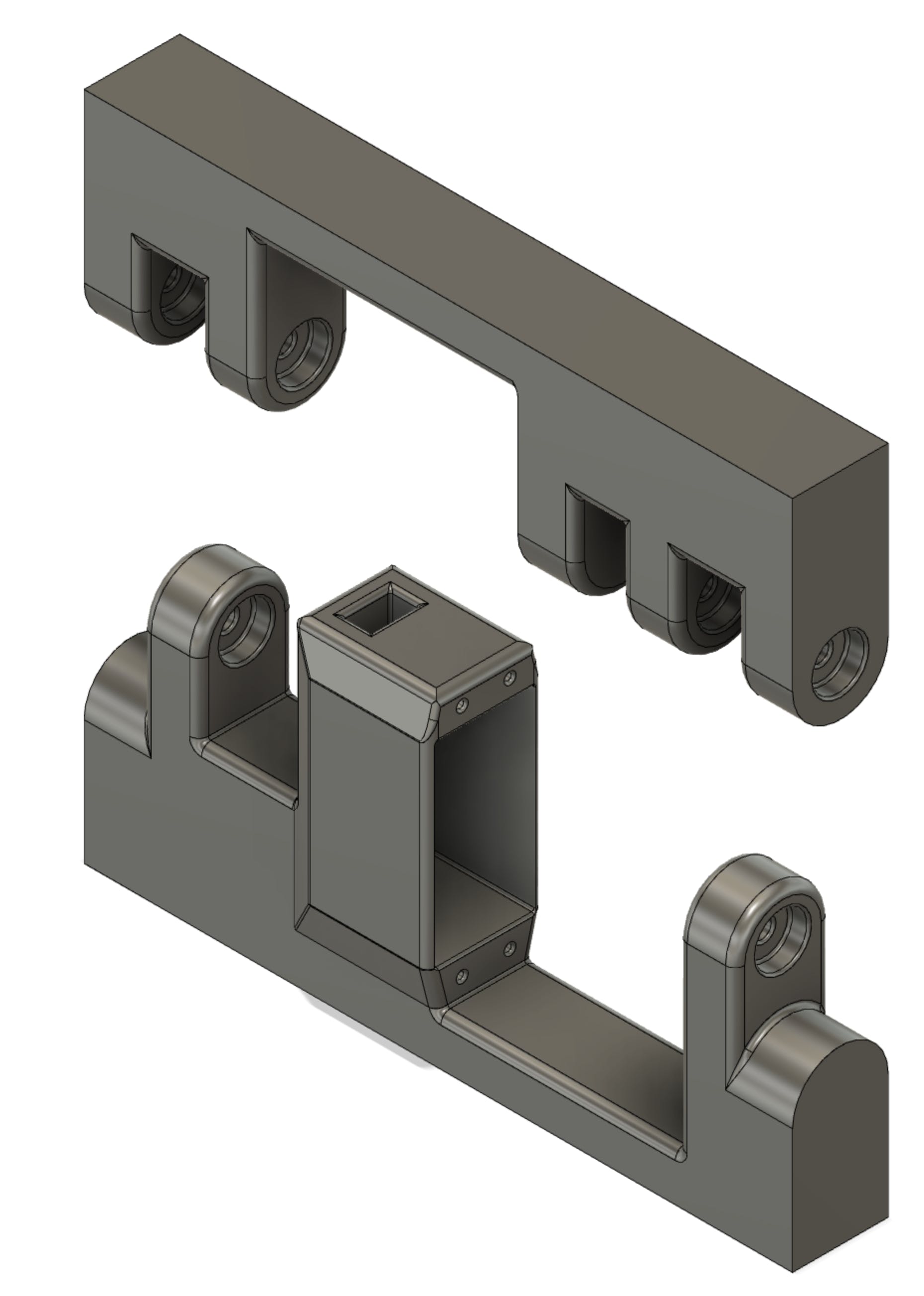
首先,我在 HobbyKing 上发现了这些 11kgcm 扭矩伺服系统,并开始尝试围绕它们进行设计。“标准尺寸”伺服系统的主要问题之一是它们不是标准的,而且它们的形状很难处理。我开始尝试围绕它设计一个铰链,它可以承受负载而不会对伺服本身施加过度的机械应力。当时我没有 3D 打印机,所以我从3D Hubs订购了一台。当然,它的价格为 120 美元,并且需要两周时间才能送达。它还依赖于一些法兰轴承和螺钉。简而言之,它太大、太复杂且制造成本太高。它确实让我发现了NZ Miniature Bearings - 这是一个非常棒的网站,我发现它浏览起来非常平静。
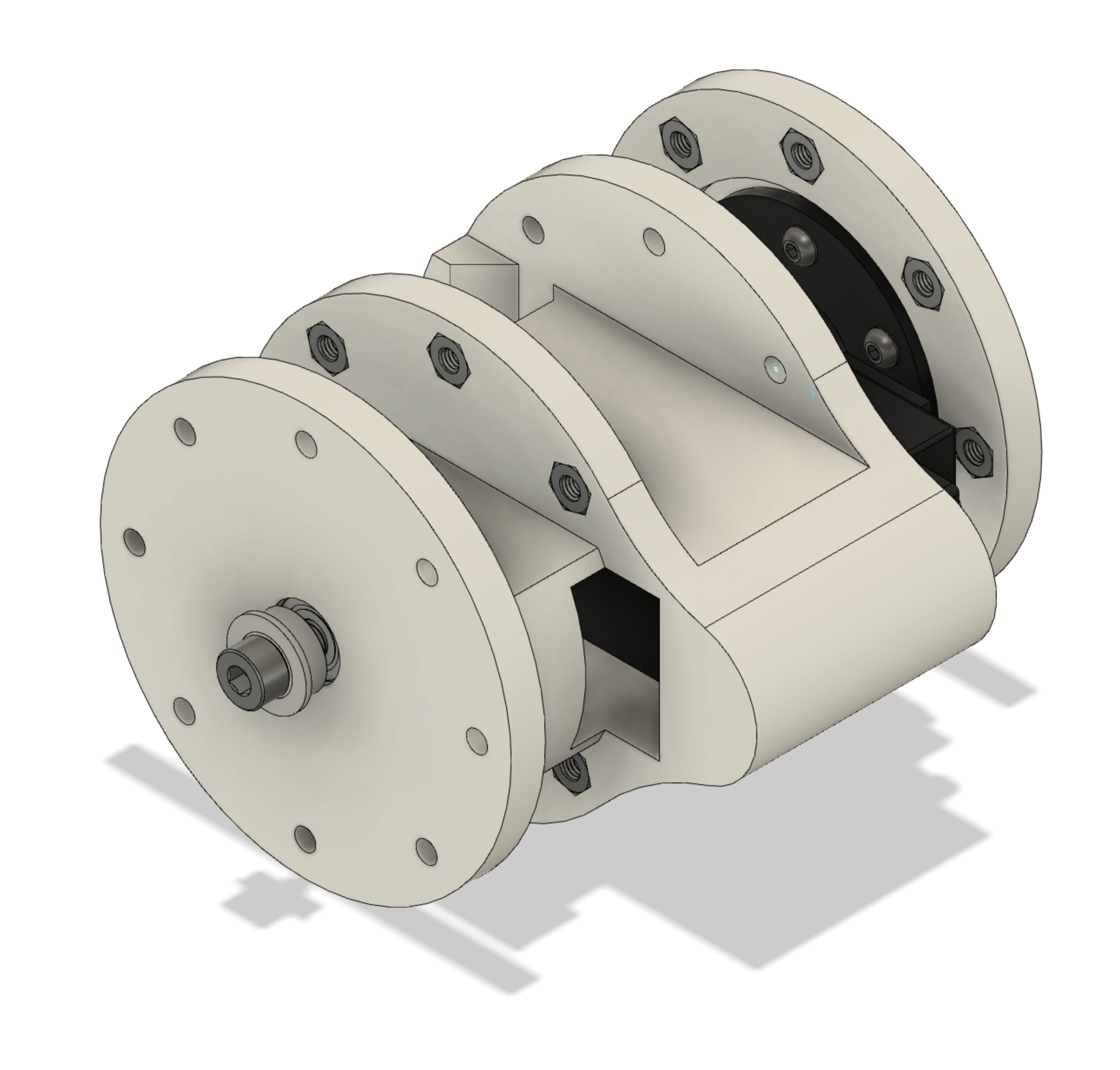
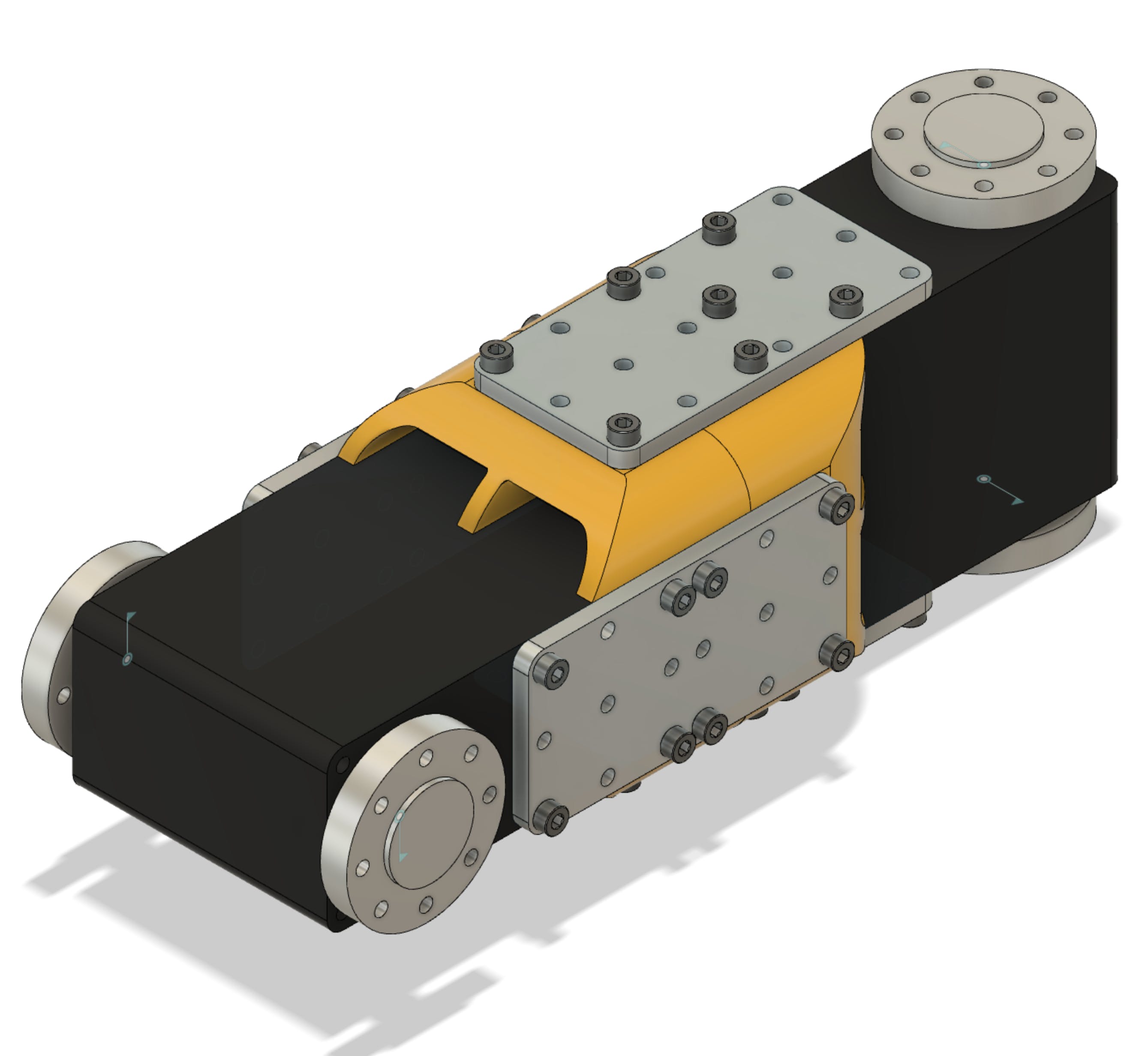
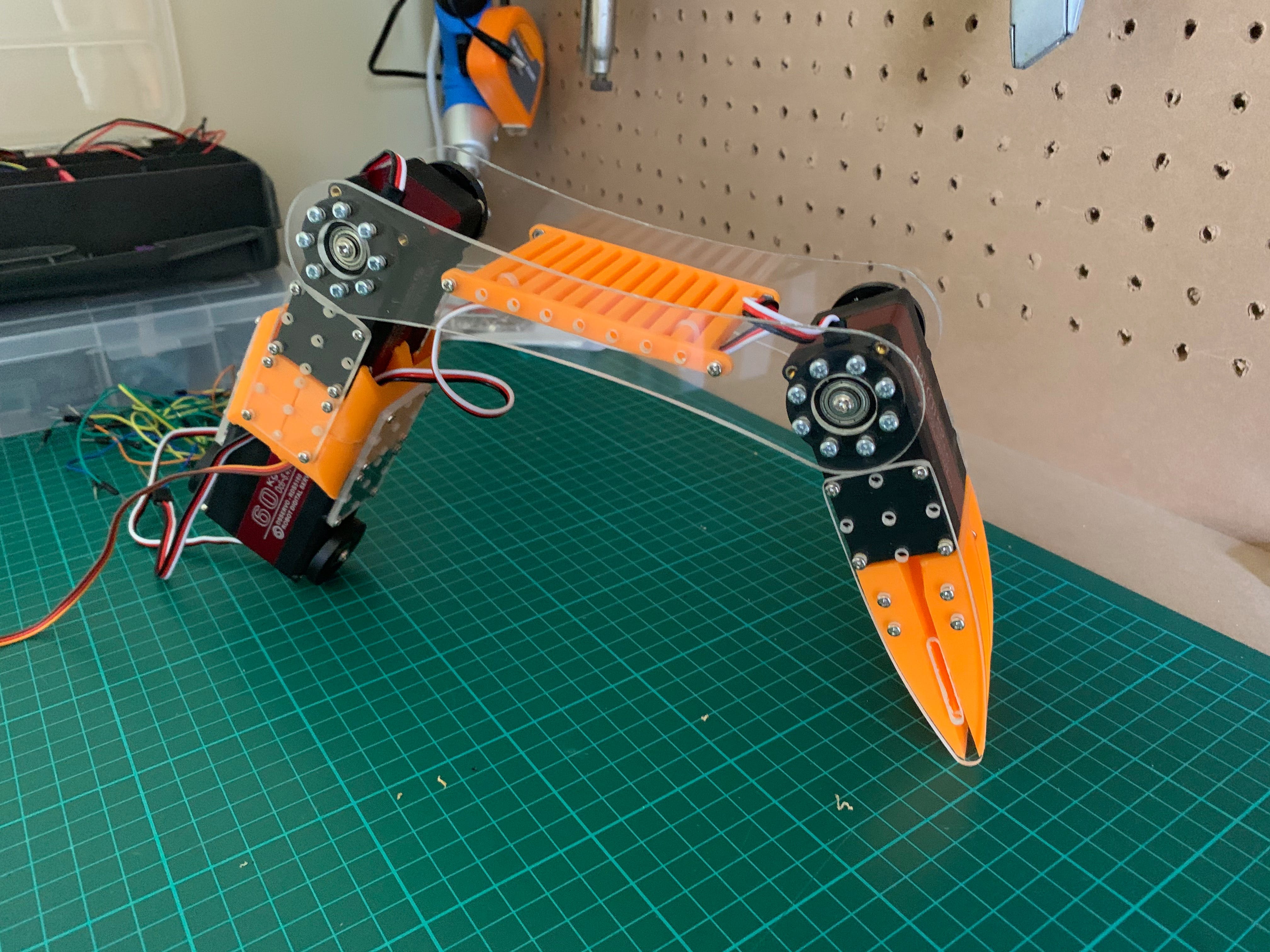
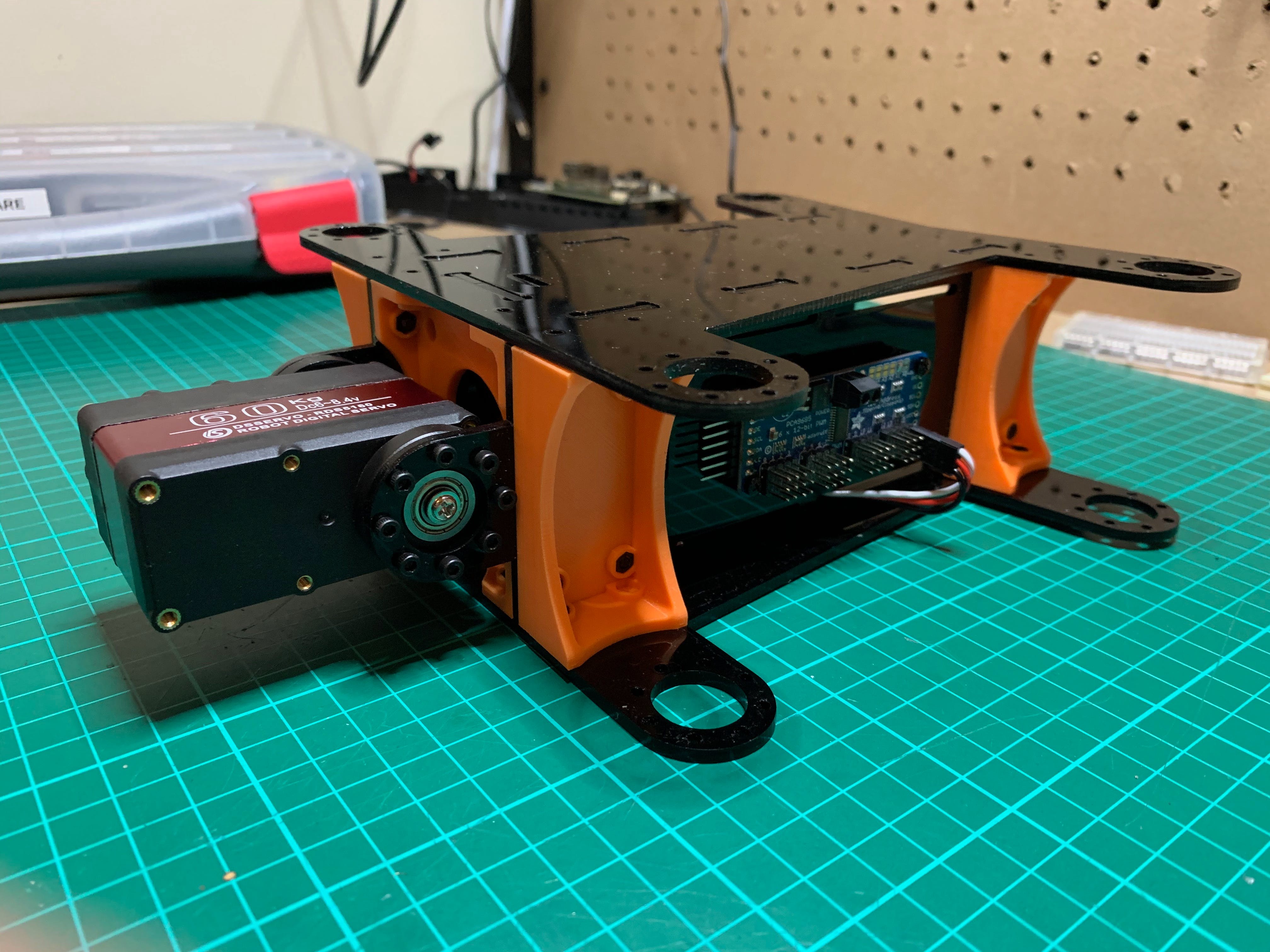
在此之后,我开始研究机器人伺服系统并发现了令人惊叹的DSServo RDS5160 伺服系统- 能够提供高达 60kgcm 的扭矩并且尺寸合理且具有易于建模的连接点。我一接触到一些东西,就立刻在脑海中构想出这东西是如何工作的。也是在这个时候,我发现自己在工作之间有一点现金可以花,所以我就花掉了。我买了一台 Tarantula Pro 3D 打印机和一台3018 Pro CNC 路由器,并开始快速迭代设计。从新伺服选择的 30 毫米宽度和 12 毫米安装网格中取出我的尺寸队列,事情开始迅速聚集在一起。
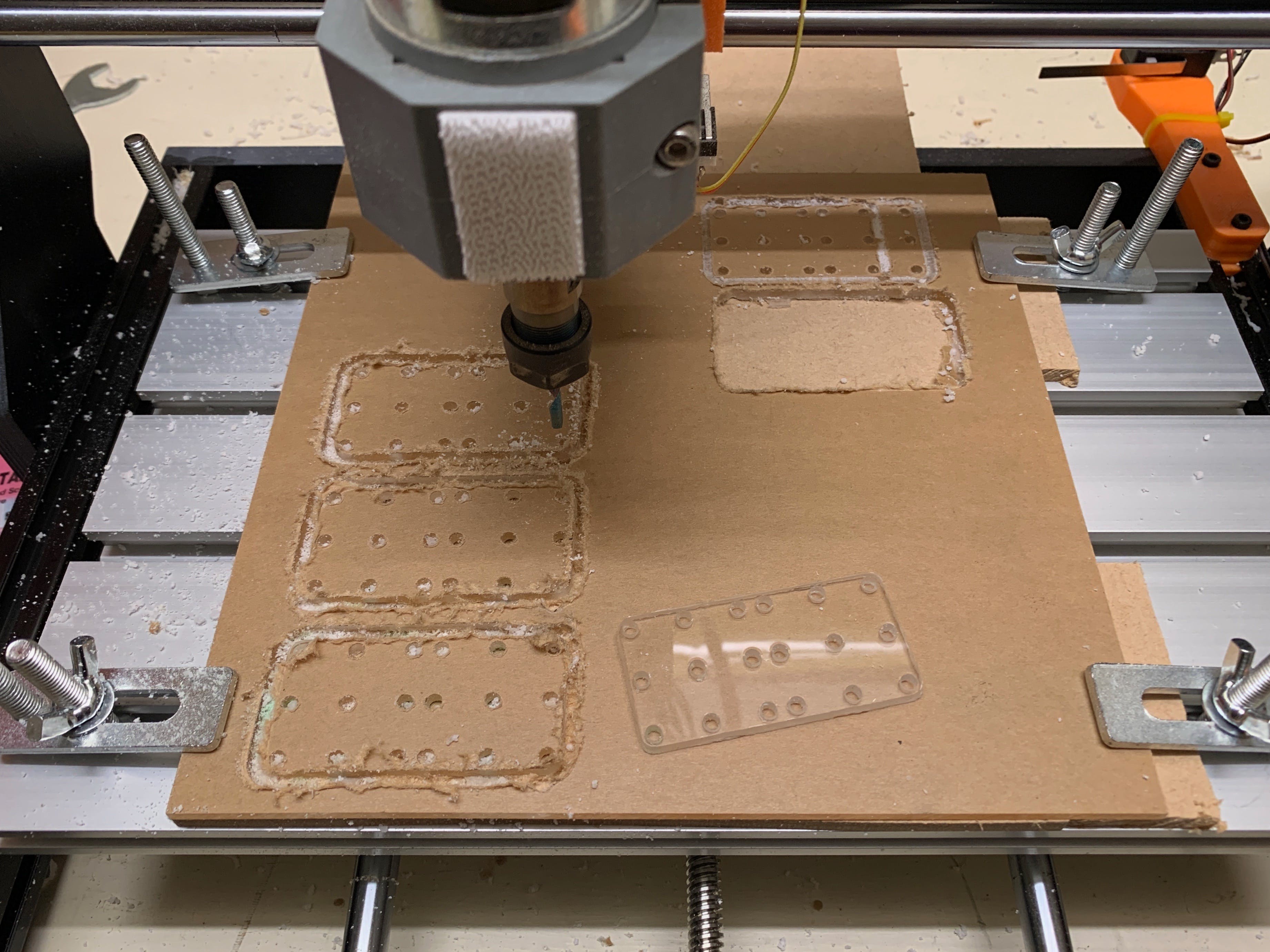
尽管在朝着我喜欢的设计迈进的道路上进展顺利,但我对从布线的丙烯酸部件中获得的结果并不满意。3018 是一台有趣的小型机器,但即使进给和速度极低,NEMA17 尺寸的步进器也往往会在主轴最轻微的背压下跳过步骤,而且噪音和混乱令人难以置信。我开始研究激光切割机。
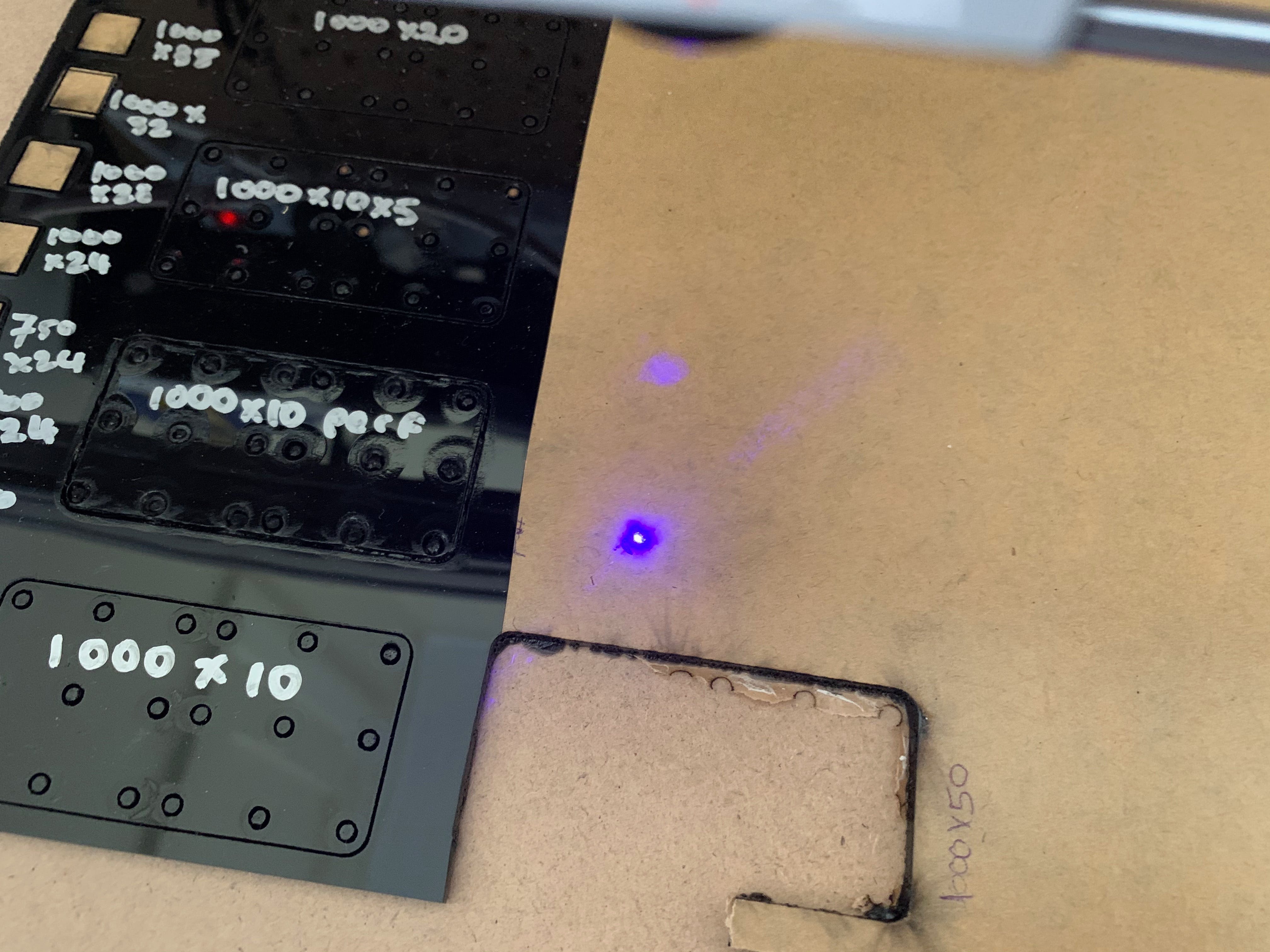
我从 AliExpress 购买了这个非常便宜的 X/Y 龙门架,并为它配备了我在购买 3018 时随附的据说是 10 瓦的激光器。我开始试验它,但得到的结果非常不令人满意。尽管激光放出了大量热量,但无法将其聚焦到足够精细的点以获得良好的结果。过多的热量还导致材料变形,所以这是行不通的。
所以,我又开始环顾四周,遇到了Endurance Lasers制造低成本二极管激光器的人。我在黑色星期五得到了一个很好的交易并订购了一个。当然,此时我的花费大约是我从全球速卖通订购“K40”型 CO2 激光器的两倍。你生活和学习。
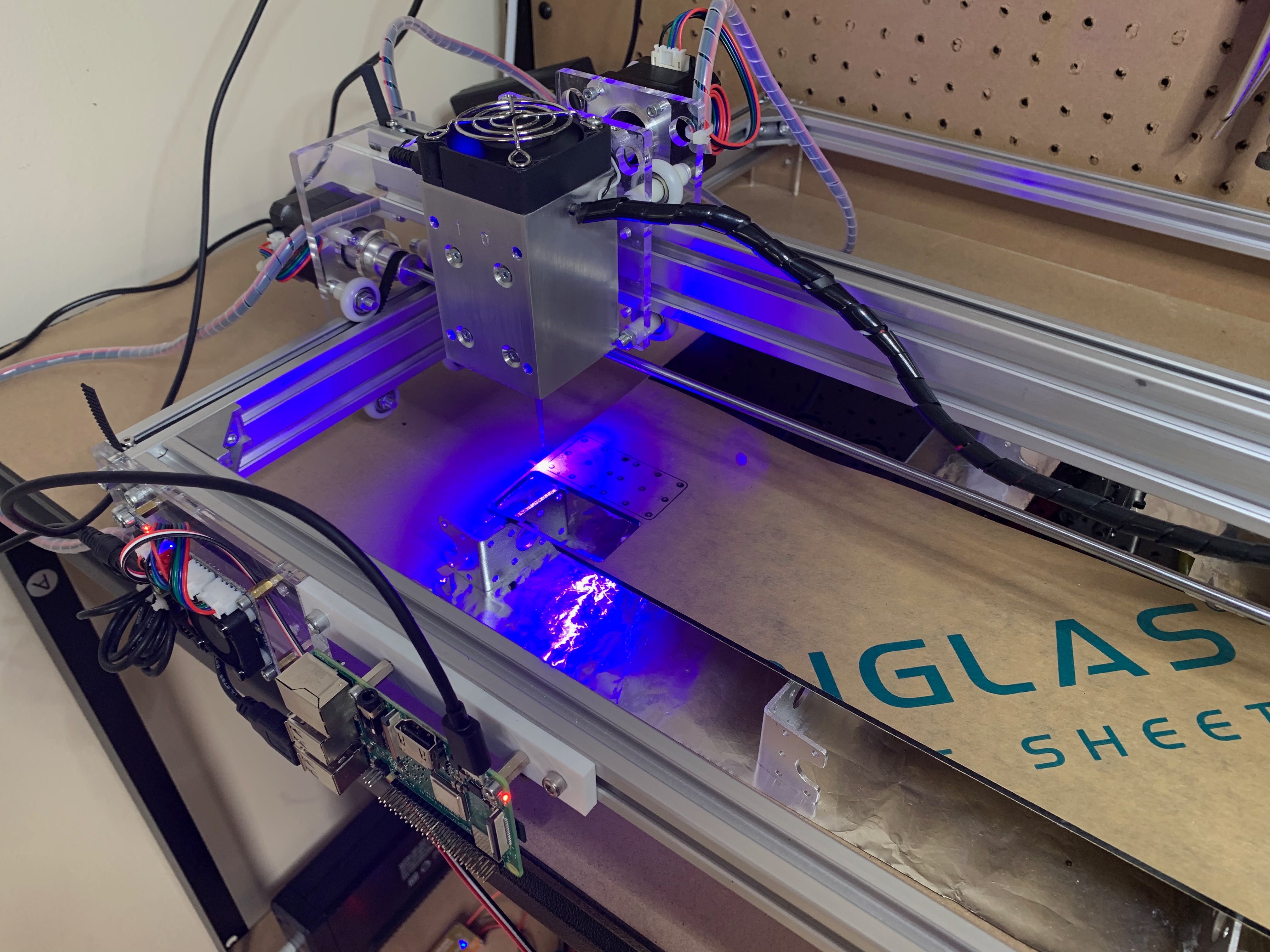
当然,一旦我对激光进行了分类,我就能够迅速开始建造一些腿。


更精明的人可能已经注意到机器人身体中间有一个额外的伺服系统。那是因为我的孩子喜欢 Fortnite,我想为他们添加一些乐趣。



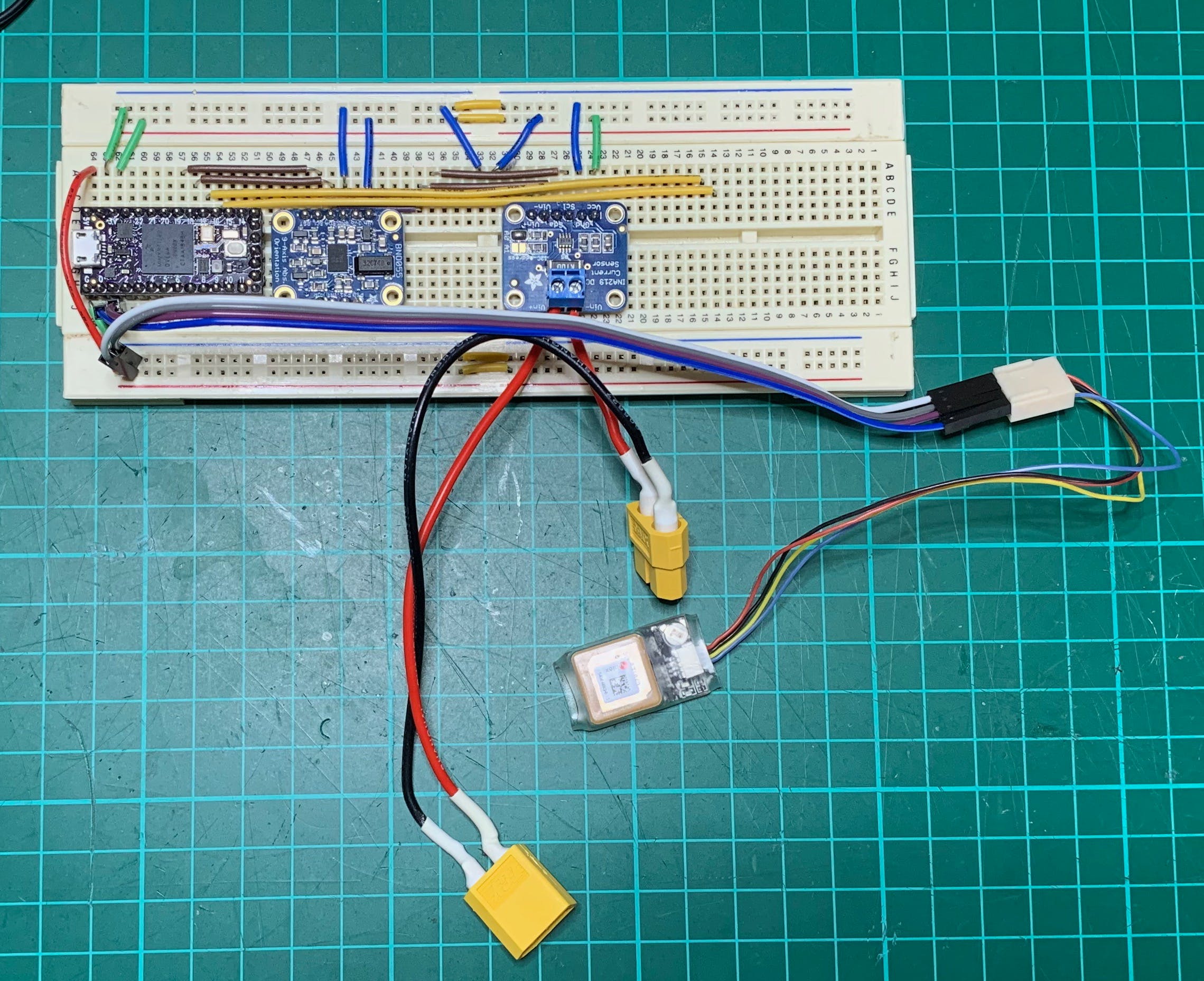
构建完成后,我将注意力转回电子和软件上。我曾计划直接从 Raspberry Pi Zero W 运行外围设备,甚至为Elixir为它们编写了一堆驱动程序,但最后我决定我想要做的紧密控制循环和集成确实需要外部帮助微。就在那时,我想起了我在那里工作时留下的一个OSH Park 版 Teensy 4放在我的橱柜里。这个很棒的小板是一个 600MHz 的 Cortex-M7,足以让我完成工作。此外,它得到 Platform.IO 的良好支持,甚至还有一个RTOS可用的。不幸的是,我还必须从深度缓存中恢复我的 C 和 C++ 编程技能——至少已经有 15 年了。
所以这就是我们现在所处的位置。这个故事肯定会有更多内容,我会及时通知您。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉




全部0条评论

快来发表一下你的评论吧 !
