


构建移动机器人
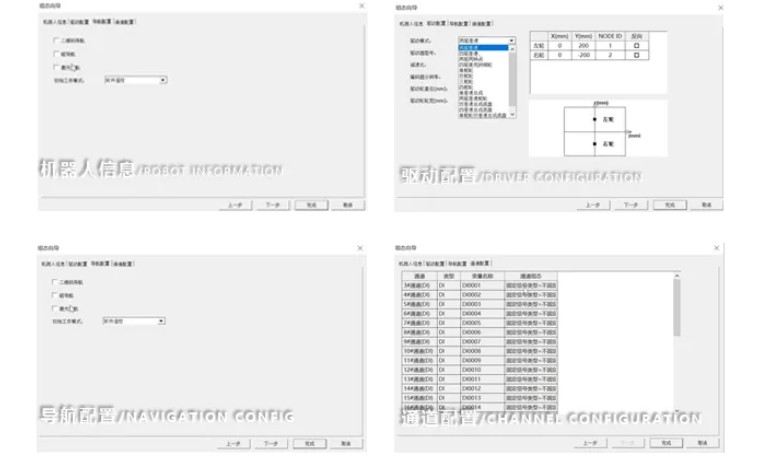
按照向导指引输入:机器人机械参数(长宽高等)、运动控制类型(底盘方式)、自主导航方式(主导航类型)、电气功能配置(机器人电气逻辑)等。工具链软件自动生成相关标准程序页,机器人即实现了自主导航的基本功能。
0基础图形化式开放
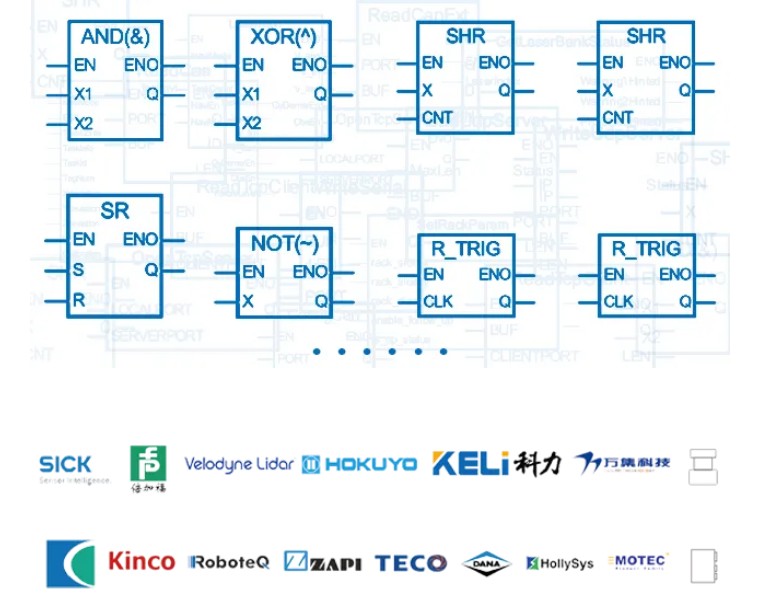
内置IEC标准库,包含逻辑运算、数学运算、通讯处理等功能块;内置移动机器人控制库包含底盘控制、导航控制、调度控制等类型全面的功能块。
拖动即可支持多种品牌及类型
将各种主流常用的激光传感器、二维码相机、伺服驱动器、网络模块、避障类传感器、天线、显示屏等按品牌封装成功能块,方便直接调用。
开发不再受限于运动模型
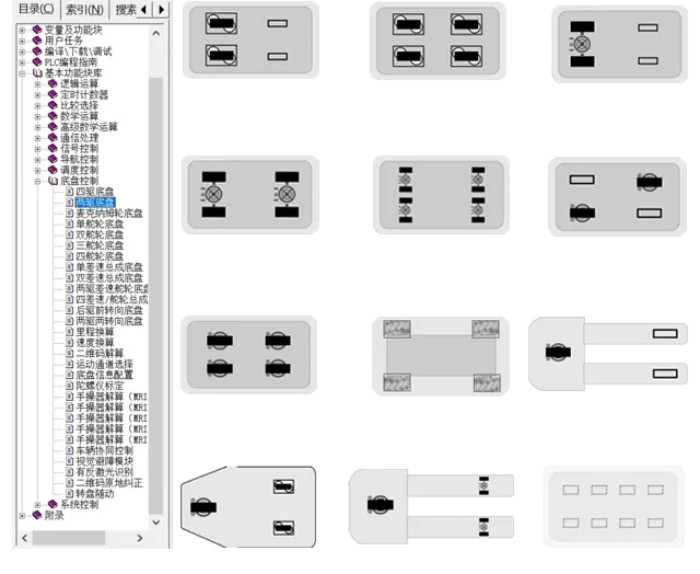
支持两驱差速、四驱差速、单差速总成、双差速总成、四差速总成、单舵轮、双舵轮、四舵轮、麦克纳姆轮、两驱差速舵轮、单舵轮双差速总成等主流底盘方式,以及个性化底盘方式。
用户自主定制编写功能模块
可实现机器人的行业应用功能,如液压控制、叉齿控制、抬升机构、顶升机构、抱夹机构、皮带机构、滚筒机构、升降机构、旋转机构、机械臂、柔性机械臂和云台控制及专属机构等,以及信号指示、语音交互、HMI人机操作等。
展现移动机器人无限可能性
可根据项目现场应用需求,提供行业应用工艺软件包,如绕障、电梯及多楼层、栈板识别、货车位置识别等。

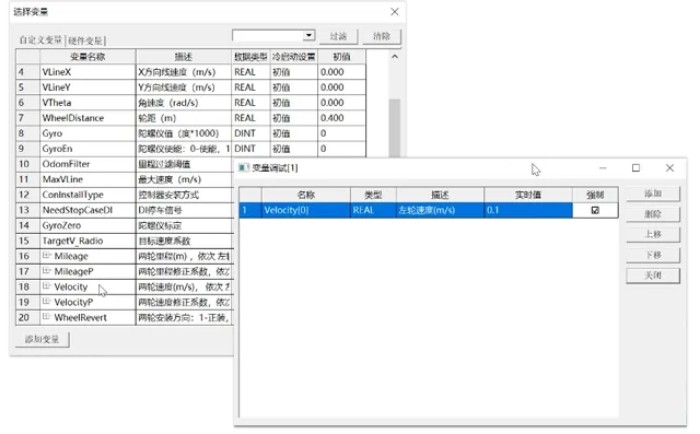
用户自主定制编写功能模块
通过联机实时查看机器人的全部状态信息,可及时诊断到机器人运行状态,全面提升机器人连续可靠稳定运行能力。
全部0条评论

快来发表一下你的评论吧 !

