

提到毫米波雷达,就要先提“物联网”,众所周知,物联网的定义就是通过各种传感器,按约定的协议,把物品与互联网连接起来,进行信息交换和通讯,以实现智能化识别、定位、跟踪、监控和管理的一种网络。
毫米波雷达是物联网中不可或缺的传感器之一,是一种广泛用于测距和探测物体的无线电传感器。毫米波传感器一般包括三个主要部分:
发射机TX:放大并发射毫米波信号
接收机RX:接收目标反射回来的毫米波信号
信号处理DSP:处理信号以获得物体的信息
利用物体的距离、速度和角度信息可以开发更高层的应用。
毫米波雷达的优势
对于智能时代而言,传感器已经不仅仅是采集数据的眼睛和耳朵,更是高端制造、流程控制、联网操作的大脑和心脏。毫米波传感器利用雷达的原理,赋予智能设备感知的能力。由于毫米波雷达不容易受环境(温度、光线等)的影响,能够穿透塑料、墙板和衣服等非金属材料,决定了它可以在更广阔的民用领域(交通、安防、家居、卫浴、健康、照明、农业等)中占据C位。
1
测距原理
毫米波雷达使用线性调频信号作为发射信号,使用匹配滤波器来提高接收回波的信噪比。
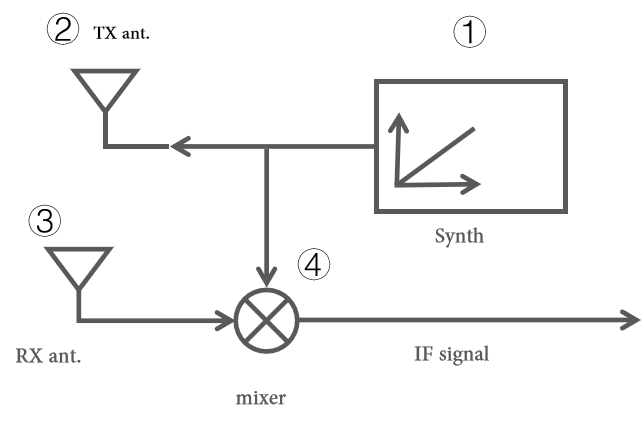
线性调频测距四步
① 合成器产生线性调频信号。
② 线性调频信号由天线发射。
③ 信号反射回来由接收天线接收。
④ 接收信号与发射信号混频产生中频信号。
2
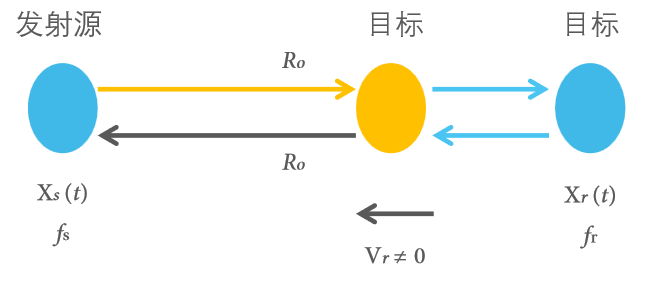
测速原理
对于运动的目标,发射信号与接收信号之间存在频率差 Δf ,这个频率差被称为多普勒频率。
3
测角原理
目标距离的微小变化会导致range-FFT峰值的相位变化。角度估计至少需要2个RX天线。从目标到每个天线的差分距离Δd导致FFT峰值发生相位变化,该相位变化用于估计到达角。
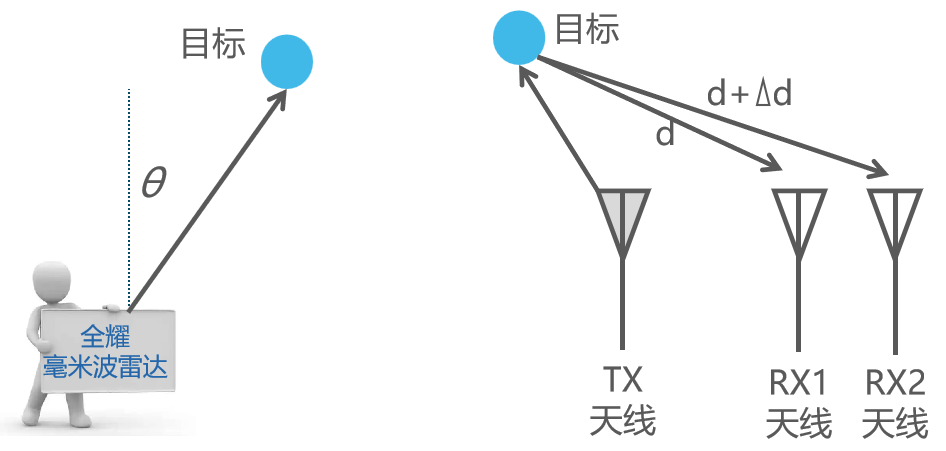
角度θ 也称为到达角(AoA),假设天线间距离为d则∆d=dsin(θ),因此可估算出到达角为θ=sin(λω/2πd),当θ 接近0 °时,角度的估算精度较高,随着θ 角度的增大估算精度降低,当θ 接近90°时,误差最大。
毫米波雷达芯片结构
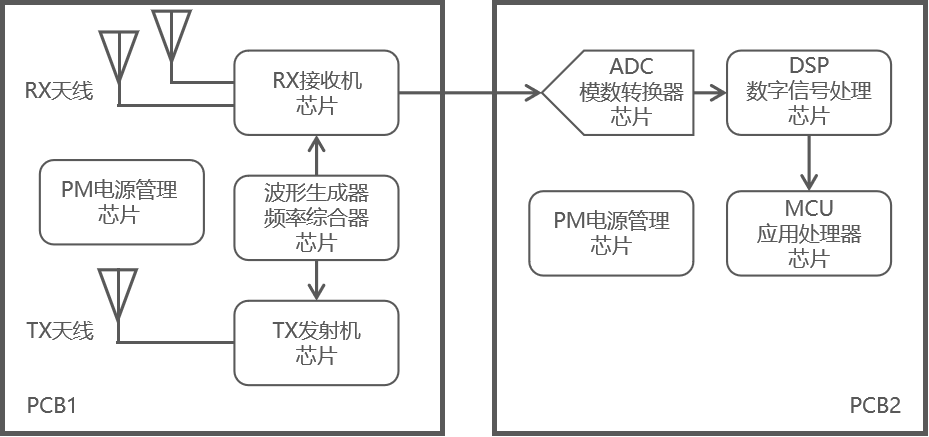
1
多芯片毫米波雷达传感器
复杂的元器件连接和布线
抗干扰能力差
系统设计和控制难
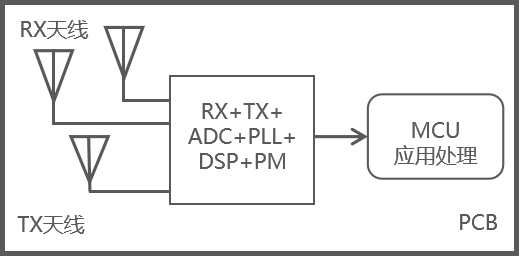
2
单芯片毫米波雷达传感器
方案尺寸小
方案设计简单
器件少
高精度
低功耗
毫米波雷达主要参数
1
发射频率
常用的毫米波雷达频段为24GHz、60GHz和77GHz这三个频段。
2
探测距离
即毫米波雷达能够探测到的范围,测距能力与很多因数有关。探测距离主要与发射功率、天线增益、天线波束角和物体反射截面积。通常发射功率越大,天线增益越高、天线波束角越窄以及物体反射截面积越大,雷达能够检测到的有效回波就越强,测量距离就越远。
3
探测精度
即单目标的速度测量精度,数据取决于信噪比(衡量雷达接收信号质量的单位)。信噪比高不高,是衡量毫米波雷达的目标检测性能是否强大的根本参数。
4
测速范围
毫米波雷达的测速是利用多普勒效应原理,当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线而去时,反射信号频率将低于发射机频率。
5
测速精度
即单目标的速度测量精度,数据取决于信噪比(衡量雷达接收信号质量的单位)。信噪比高不高,是衡量毫米波雷达的目标检测性能是否强大的根本参数。
6
天线波束角度范围
天线波束形状一般用水平和垂直面内的波束宽度来表示(3dB表示)。常见的波束形状有扇形、针状和余割平方形。天线的波束角度范围越窄,辐射的能量更集中,雷达测测的距离会越远。
只要了解以上的基础知识,咱们对毫米波雷达就有了全新的认识。随着万物互联时代的日渐成熟,毫米波雷达已经真正走进我们的寻常生活,为人们带来美好便捷、安全健康的智慧生活新体验。
全部0条评论

快来发表一下你的评论吧 !

