



王刚
分享资料个
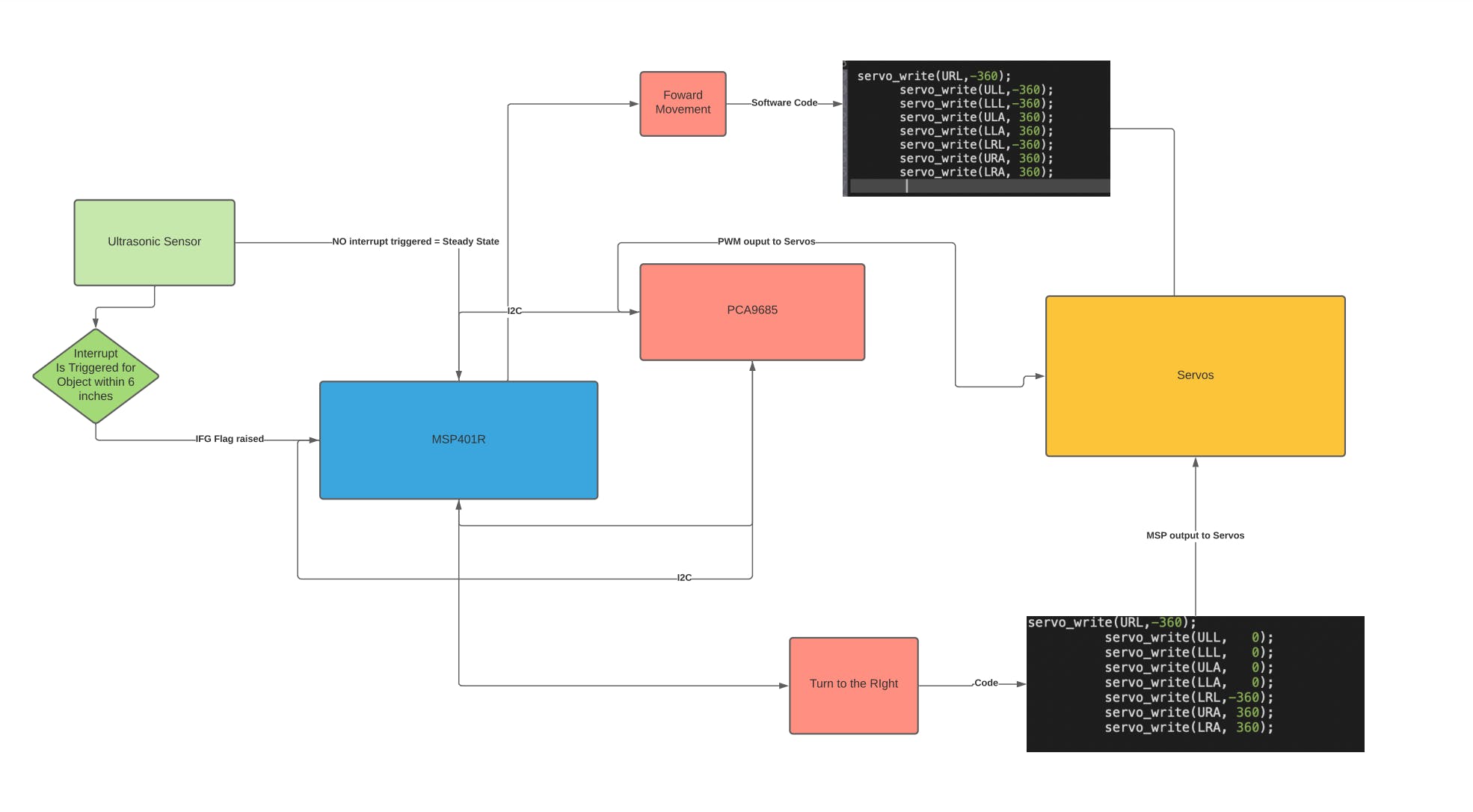
这个项目的目标是能够设计和建造一个“Roomba”类型的功能机器人。将来,当然,随着时间的推移,我们将实现距离传感器,以仅在检测到物体在 6 英寸以内时触发此中断以更改状态。这个新的状态变化将被触发,以便由 Quade 执行转向运动以避免碰撞。
Quade 正在开发一种“爬行步态”,但尚未完成。这种步态是通过抬起一条腿并向前旋转而另一条腿缓慢地向后旋转来操作的,每条腿都会重复这种步态。代码已开发但未完全实现。这是由于在确定所需角度方面存在不可预见的困难
创建了远程供电的 Quade 的设计,但也没有实施。这涉及使用 7.4V LIPO 电池和分压器,以便将电压降低到 MSP432 所需的必要 5V。然后,MSP 将能够为 PCA 板和伺服系统供电。由于缺少将分压器电路连接到 MSP USB 插座所需的适配器,因此从未实施此添加。
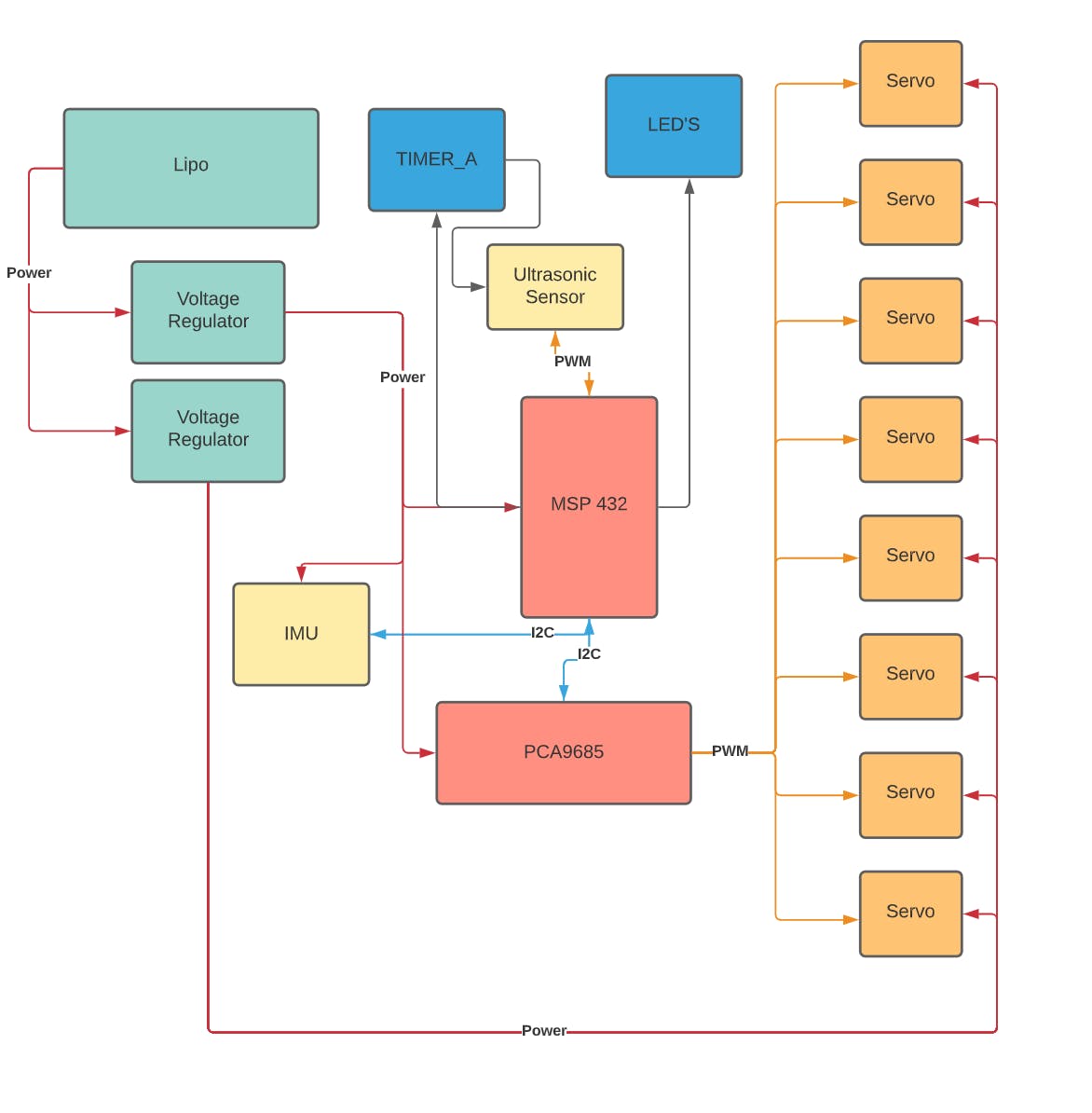
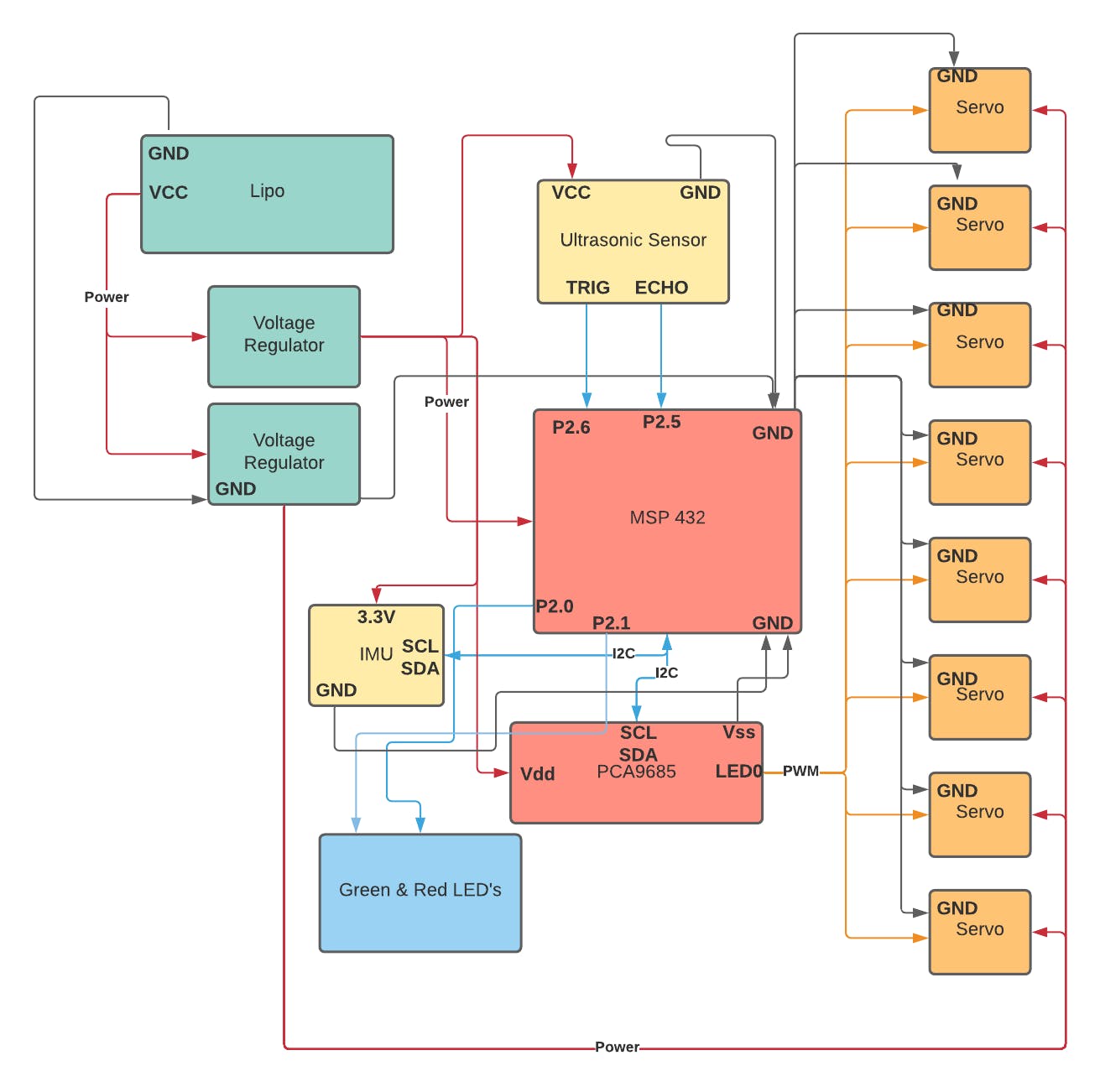
顶级软件图:
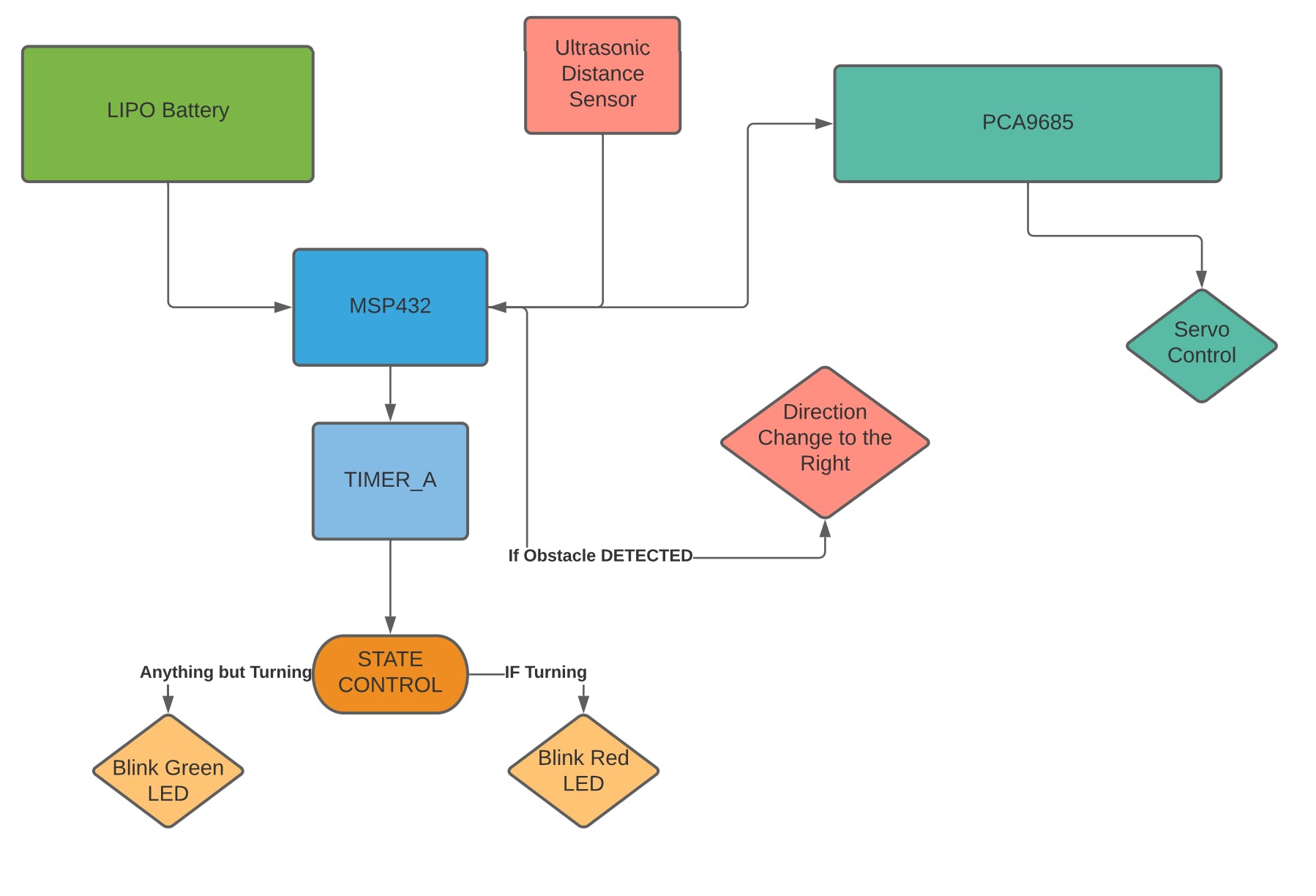
LED软件图:
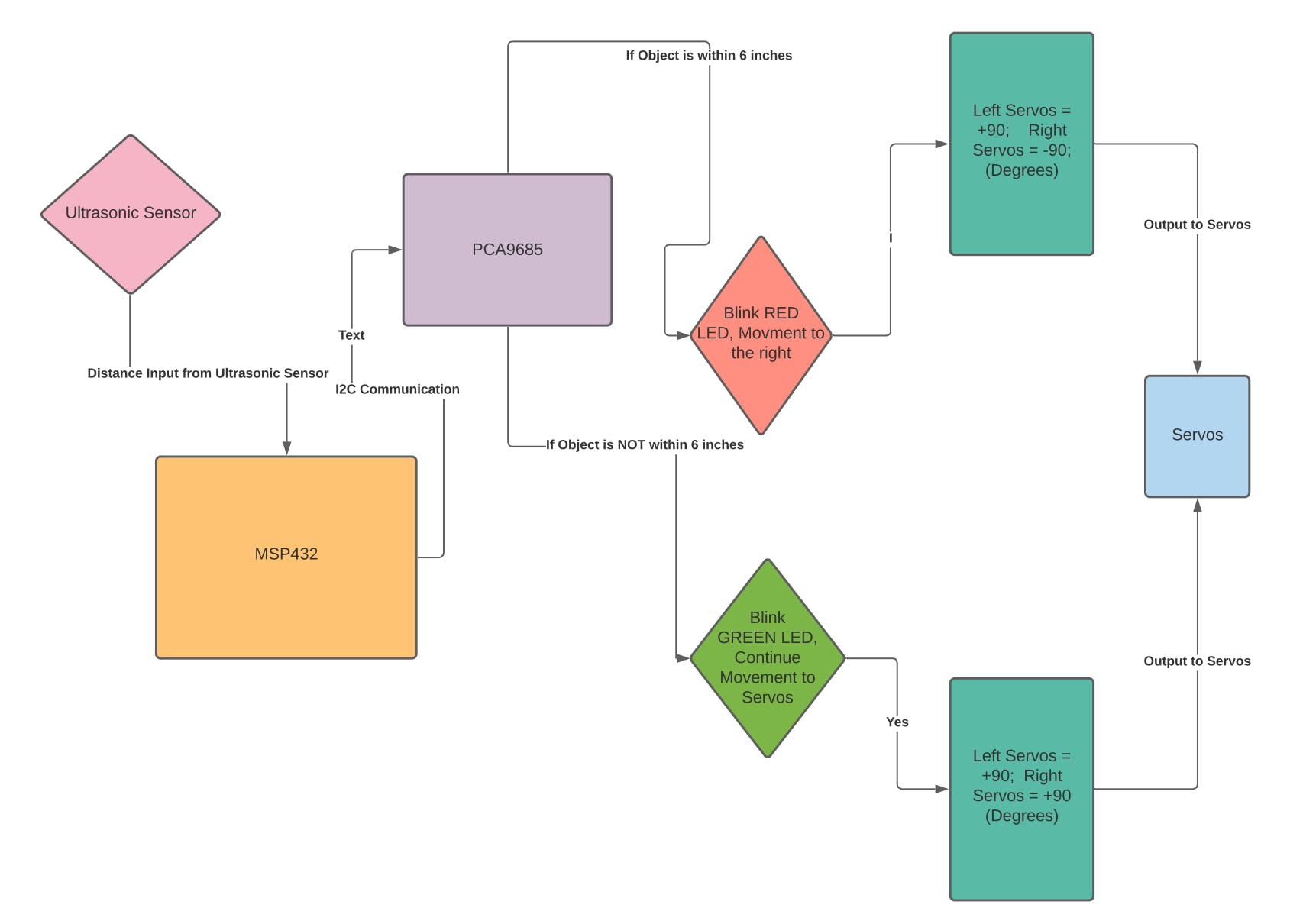
PCA 到 Servos 软件图:
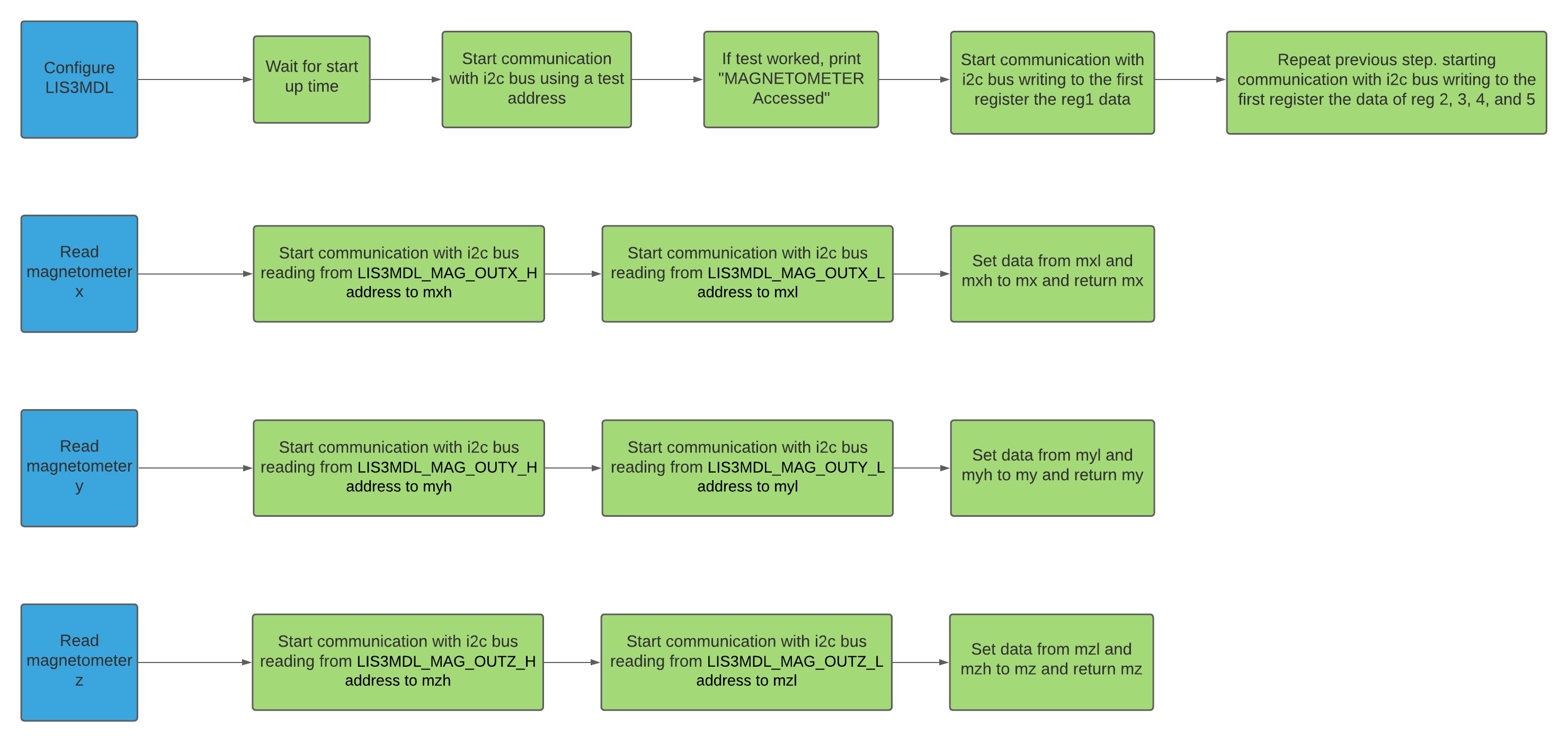
IMU软件图:
操作要求:
物理要求:
电源要求:
传感器要求:
2个伺服电机控制的单元测试
磁力计输出验证测试:
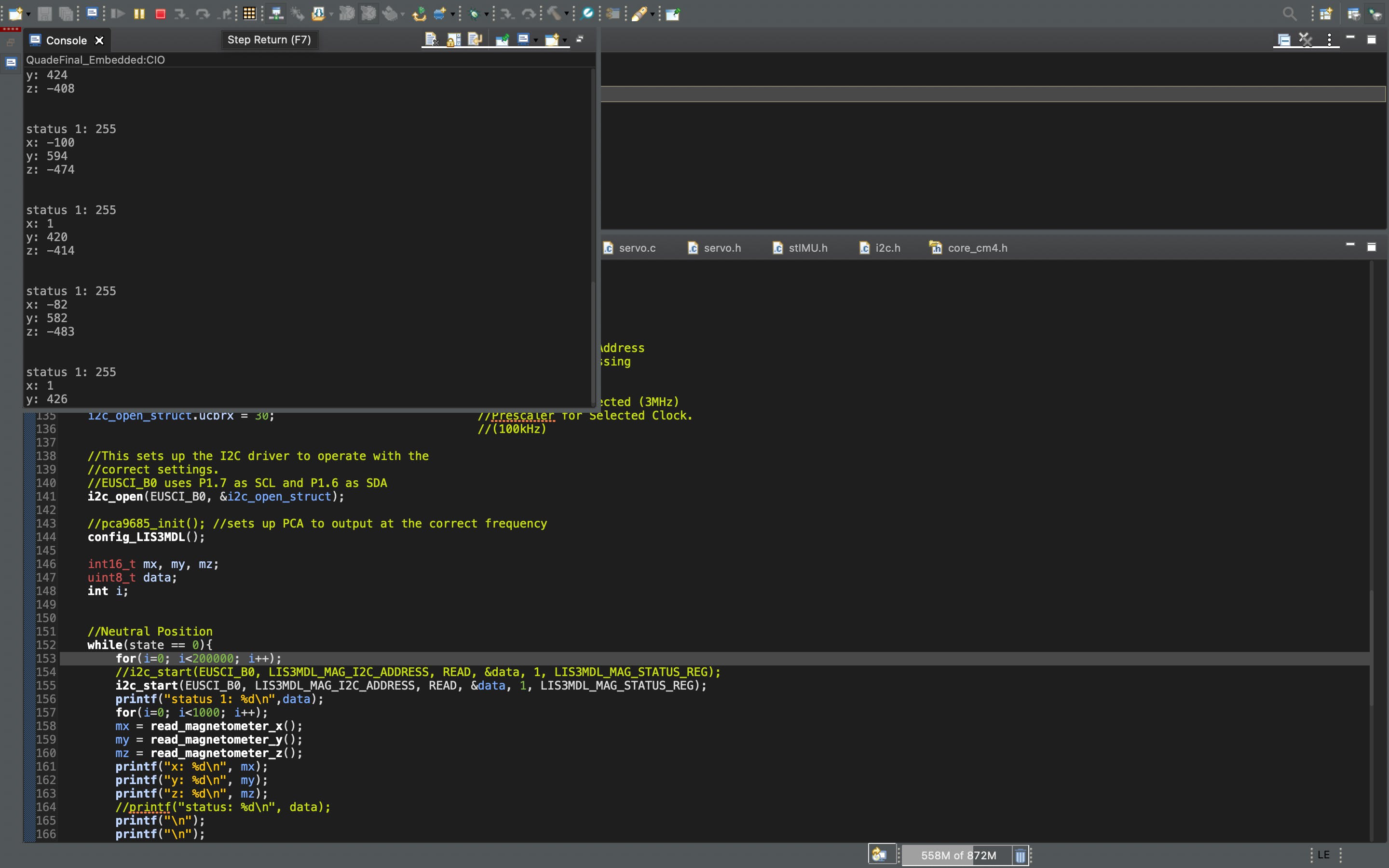
为了确保伺服运动,需要对每个组件进行单独测试,以确保正确的结果。在上图中,通过调试器显示磁力计已成功连接并正在与 MSP401R 板通信。
与磁力计的 I2C 通信:

虽然确认磁力计通过 I2C 与 MSP 通信,但当 SDA 和 SCL 总线连接到 AD2 时,无法读取逻辑。Waveforms 软件不会清除起始位、数据位和确认位,而是读取错误。这是出乎意料的,调试尝试没有产生任何结果。这将需要进一步调查。
按下按钮 S1 时触发调试器中断:
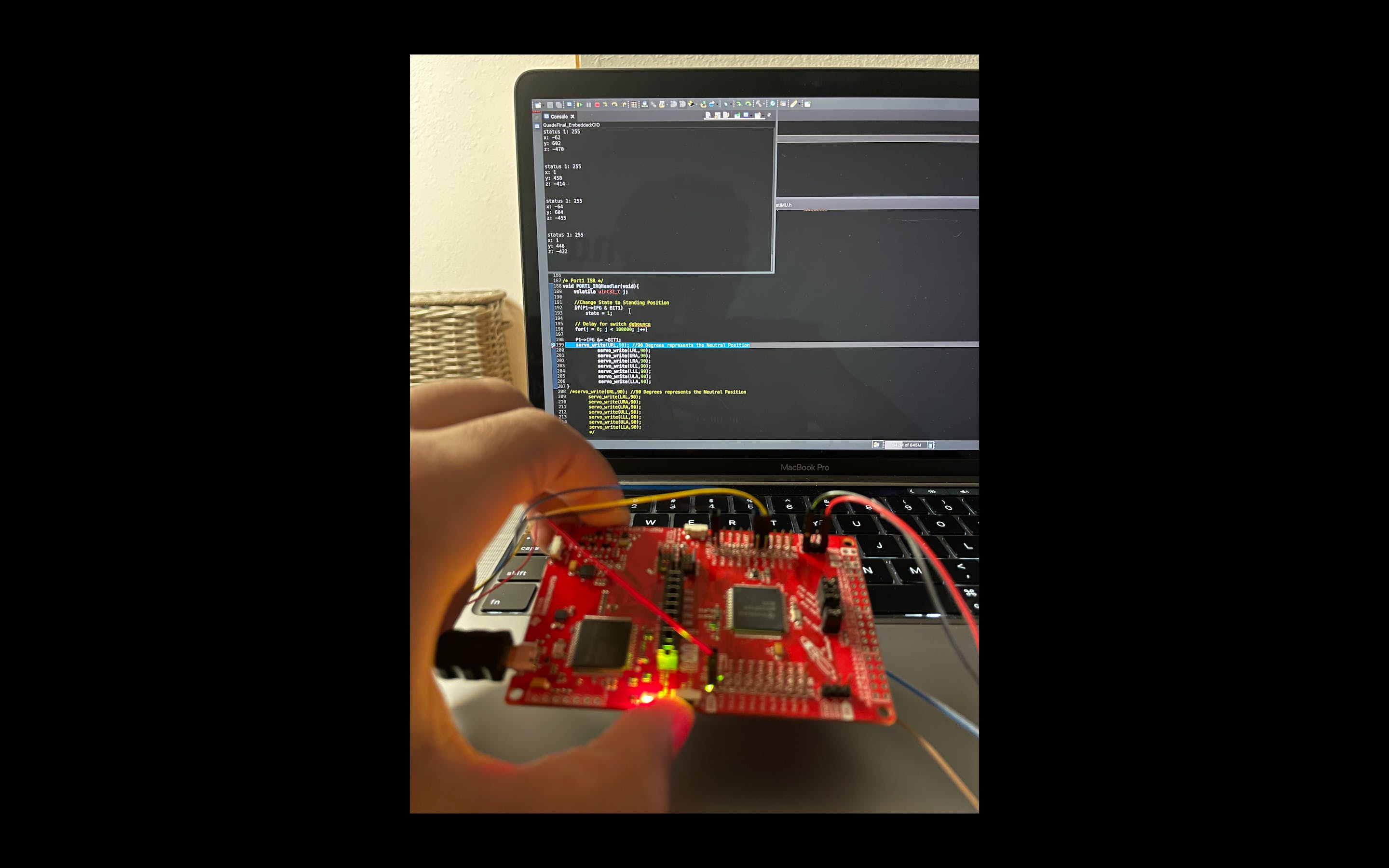
必要测试的下一部分是验证按钮触发的中断是否正常工作。在上图中,您可以看到按钮被按下,并且在调试器中,触发了中断并执行了伺服代码。
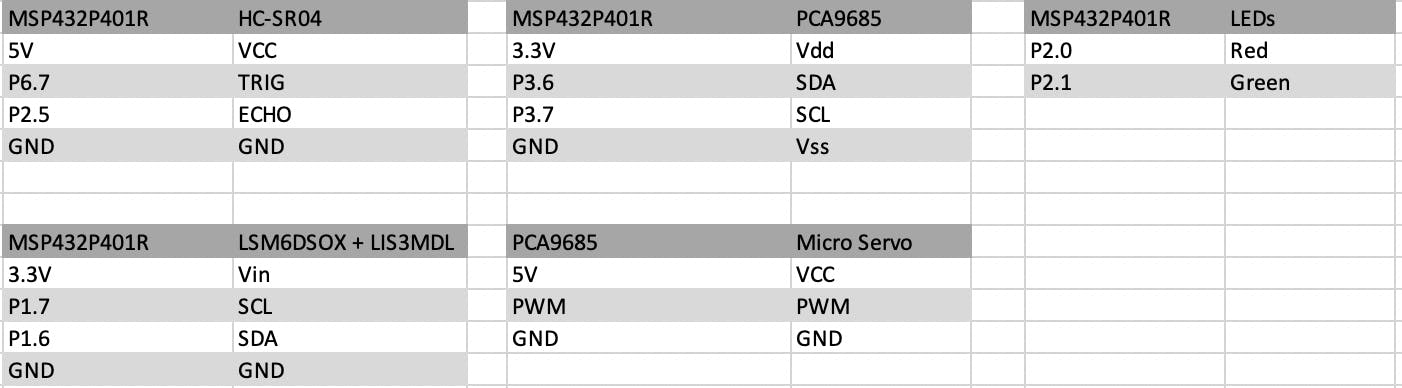
伺服单元测试的完整电路:
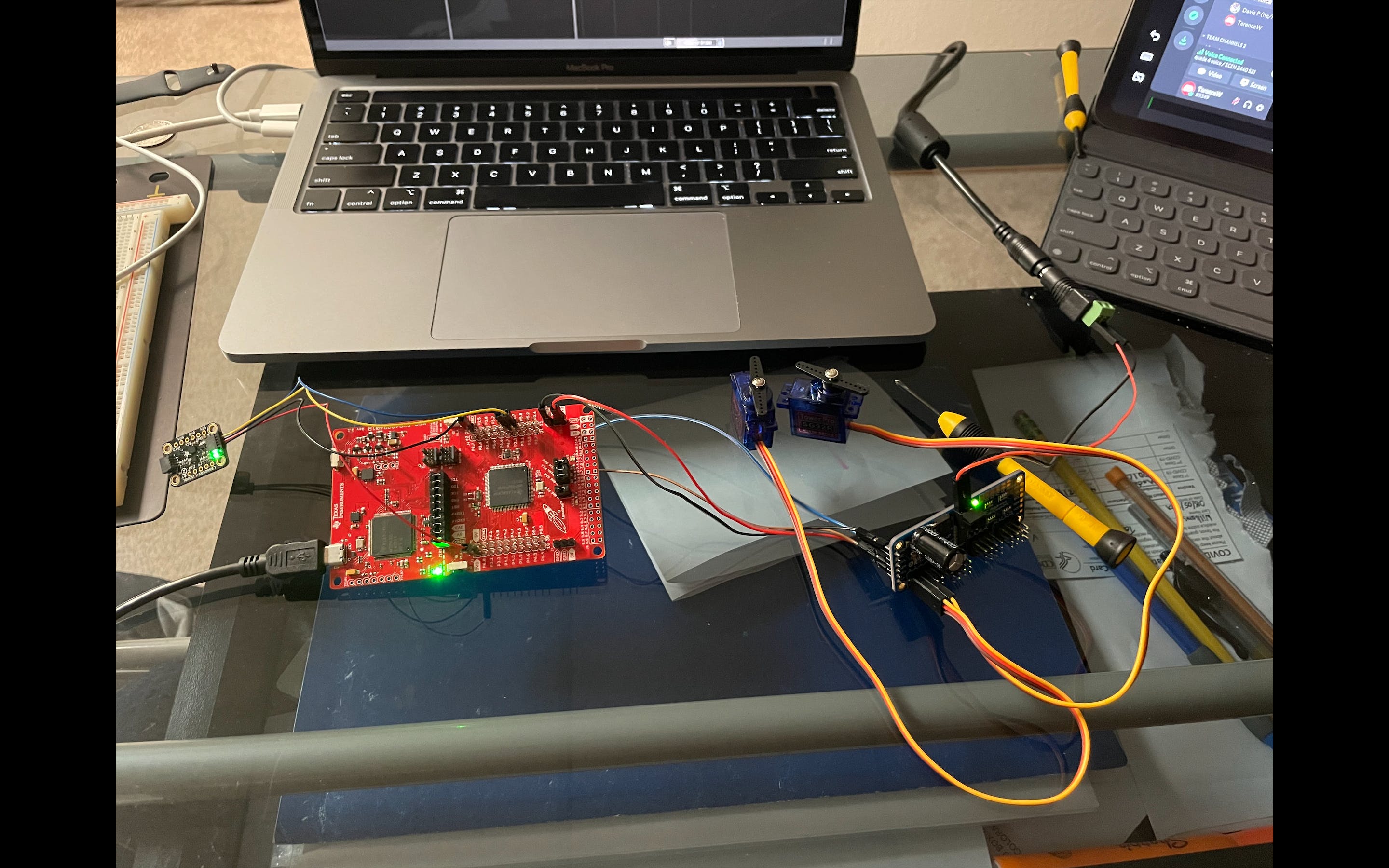
上图为 2 伺服单元测试的完整电路。总共有5个组件。IMU 通过引脚 1.6 和 1.7 连接到 MSP。PCA 也连接到这些相同的引脚,并具有与 MSP 板的电源和接地连接。最后,有两个舵机(从 8 个简化为测试用)连接到 PCA 板。额外的电源连接来自连接到 PCA 板的 10A 5V 电源,以提供移动伺服系统所需的额外电压。
运动控制贸易研究传感器
这是为确定创建 Quade 运动的最佳/最可行方法而进行的第一次贸易研究。我们研究了三个选项:红外线、超声波和激光距离传感器。我们用来对这三种方法进行排名的标准是实施的时间/难度、成本和功能。这是按照从 1 到 5 的等级进行的,其中 1 是最差的,5 是最好的。
红外距离传感器:10
实施时间/难度:3
我们以前从未使用过红外传感器,因此我们需要了解它的工作原理,但它与 MSP432 兼容。
费用:3
adafruit 的红外距离传感器的成本为 14.95 美元。
功能:4
它是一种短程距离传感器,使用红外光来确定物体的距离。它可以在一天中的任何时间使用,并且可以检测具有更复杂表面的物体。
超声波距离传感器:13
实施时间/难度:4
我们已经使用超声波距离传感器进行了一个项目,因此我们熟悉它的工作原理,这意味着它应该更容易实现。
费用:5
这确实来自我们的课程套件,因此团体成员无需额外费用,尽管 Sparkfun 的费用为 3.95 美元。
功能:4
它是一种短程距离传感器,使用声波来确定其附近物体的距离。因为它使用声波,Quade 可以在几乎任何环境中的任何时间使用。它确实无法检测具有极端表面的物体,但我们不希望遇到这样的物体。此外,我们项目的应用不需要远程目标检测。
激光距离传感器:9
实施时间/难度:2
我们以前从未使用过 LiDAR 传感器,因此我们需要学习如何使用它,但它与 MSP432 兼容。
费用:2
我们能找到的最低 LiDAR 传感器成本是 Seeed Studio 的 39.95 美元。
功能:5
它是一种远程距离传感器,使用激光来确定物体的距离。它非常准确,可以高频检查物体,因此可以检测快速移动的物体。激光雷达可以昼夜使用,由于波长较短,可以探测到更小的物体。
在这些条件下,我们确定最适合我们的 Quade 运动实施的是使用超声波距离传感器。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉





全部0条评论

快来发表一下你的评论吧 !
