

应用电子电路
桥式电路是一种常见电路,其中2个电路支路(通常彼此关联)通过在前2个支路的某个中间点处连接在前2个支路之间的第三支路”桥接“。
一、H桥电路
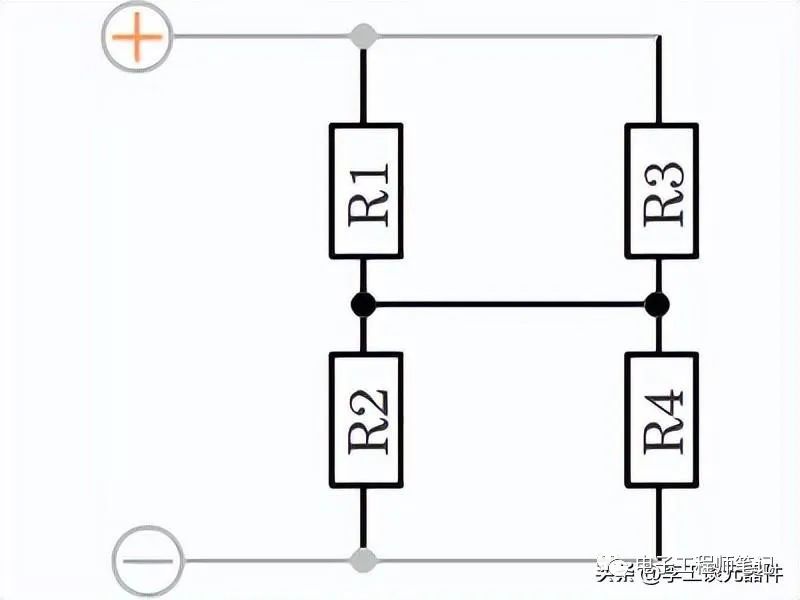
非常简单的桥式电路为H桥电路,具体的如下所示,图中间的导电路径,R2 两端的电压等于 R4 两端的电压,R1 两端的电压等于 R3 处的电压,与四个电阻的电阻值无关。
如果两个分支之间没有电桥,中点的电位取决于电阻值的比率。如果 R1 :R2 等于 R3 : R4 ,即使没有电桥,电势差也为零。
H桥电路
二、惠斯通电桥
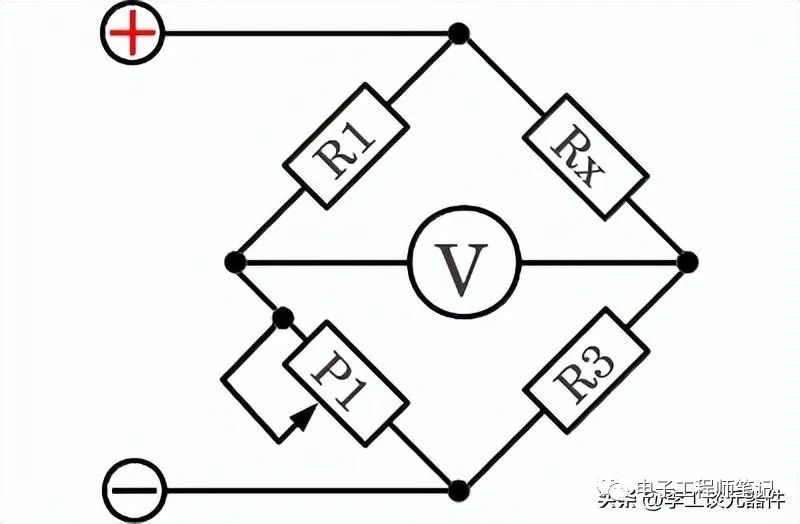
惠斯通电桥用于平衡H电桥的2条桥臂来测来位置电阻。
两个恒定电阻(R1和R3)电位计和未知电阻形成电路的2条支路,并通过电压表或者电流表桥接。只要左侧的电路之比等于右侧的电阻,电桥两点之间的电路以及流过路径的电流就为0。当使用电压表时,改变电位计直到2个中点之间的电压降为0。
而当使用电流表时,则没有电流流过仪器。电位器滑动触点的位置与未知电阻的阻值之间存在线性关系。因此可以校准电位器的刻度,便于读取未知电阻的阻值。
惠斯通电桥
三、2个电位器组成的H桥
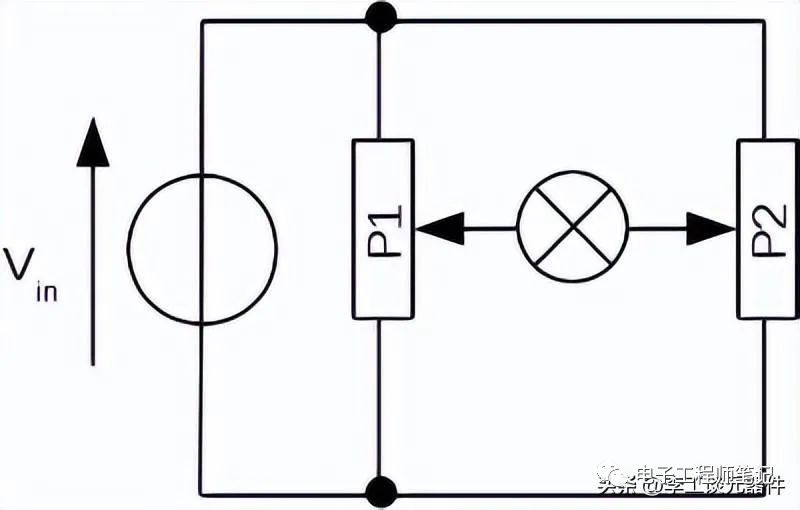
2个电位器组成的H桥可以将+VIn和 -VIn之间的任何电压施加到连接在两个电位器之间的负载。
虽然电位器适合手动调节低功率设备的电压,但晶体管甚至可以通过几乎任何电子电路来控制高功率设备。
2个电位器组成的H桥
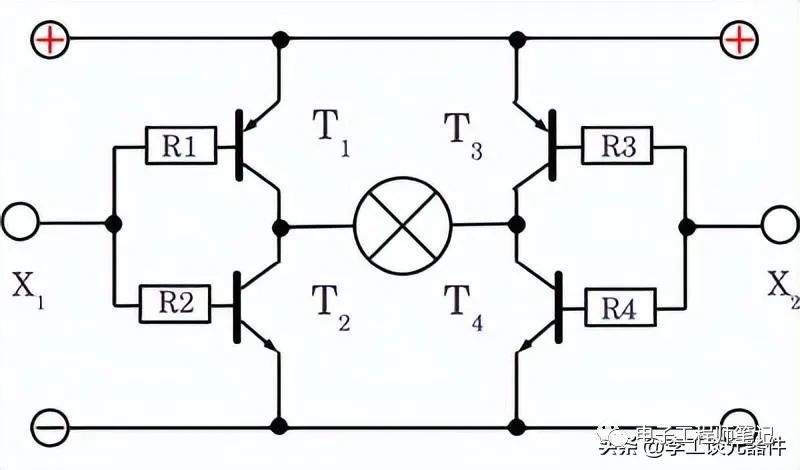
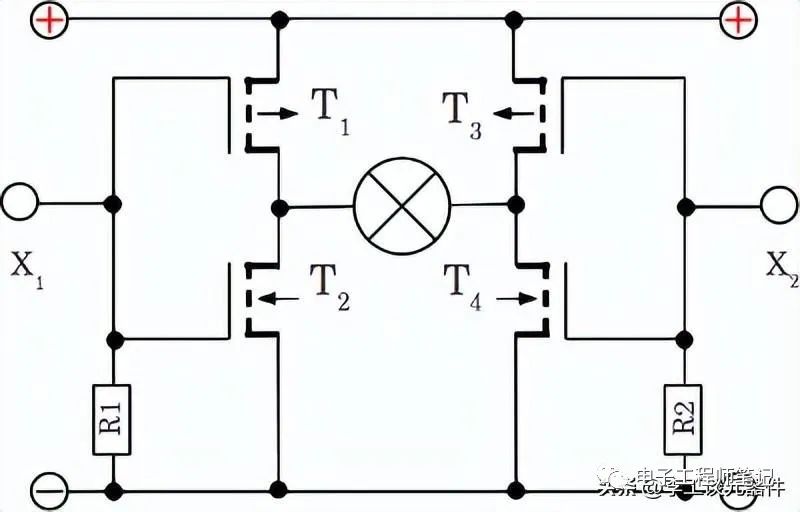
四、由两个NPN和两个PNP晶体管组成的H桥
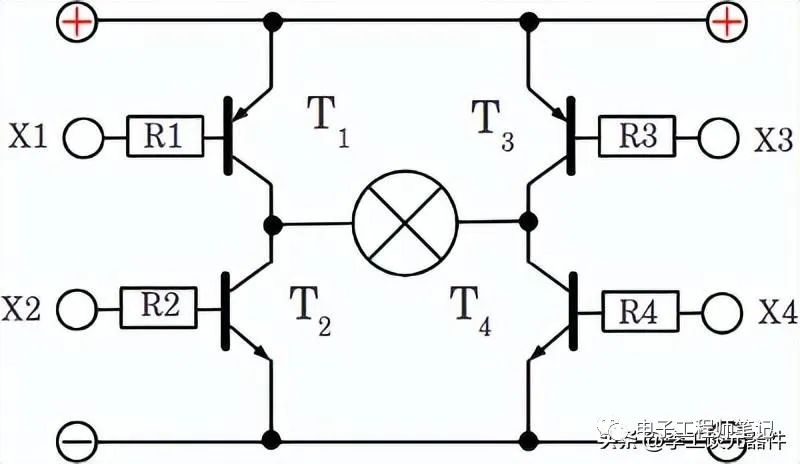
由两个NPN和两个PNP晶体管组成的H桥,下部NPN晶体管的电阻不断减小,而接地(=负端子)与X2和X4之间的电位不断增加。如果输入钳位处的电势等于电路的输入电压,则电阻最小。连接到基极引脚的串联电阻限制基极电流。
相反,当地与X1和X3之间的电位为0V时,PNP晶体管的电阻最小,而如果输入钳位的电位等于输入电压,则PNP晶体管的电阻最大。
T2和T4被称为低侧晶体管,而T1和T3被称为高侧晶体管。
由两个NPN和两个PNP晶体管组成的H桥
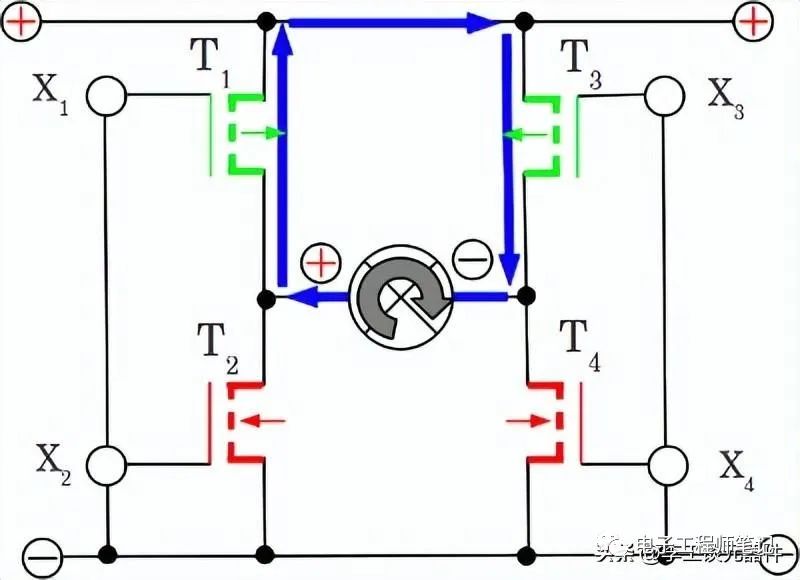
1、X1和X2分别接地, X3和X4连接到正电源电压
当X1和X2分别接地,将 X3和X4连接到正电源电压时,T2和T3的电阻处于最大值,而T1和T4的电阻处于最小值。
结果电路左侧中点的电位几乎等于电源电压,而右侧中点的电位几乎为0。电流从正极经过T1从左向右流经负载,最后流经T4到电压源的负极端子,正极端子位于负载的左侧。
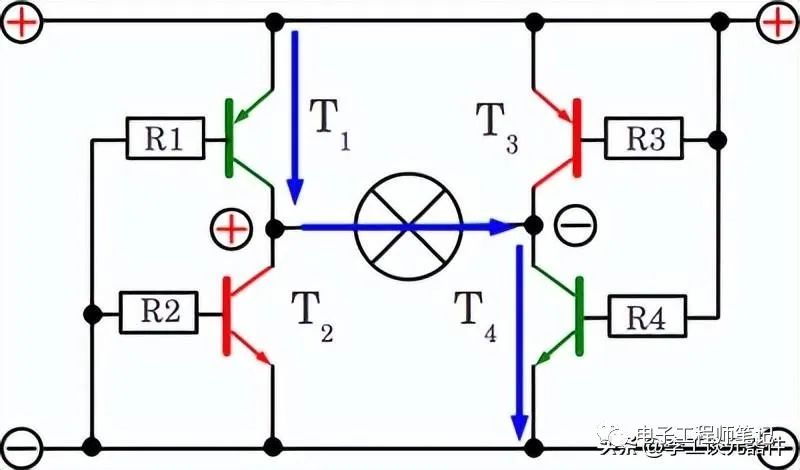
X1和X2分别接地, X3和X4连接到正电源电压
2、X1和X2连接到正电源电压,同时X3和X4连接到地
如果X1和X2连接到正电源电压,同时X3和X4连接到地,情况会发生变化。现在正极端子位于负载的右侧,电流分别流过T3和T2。
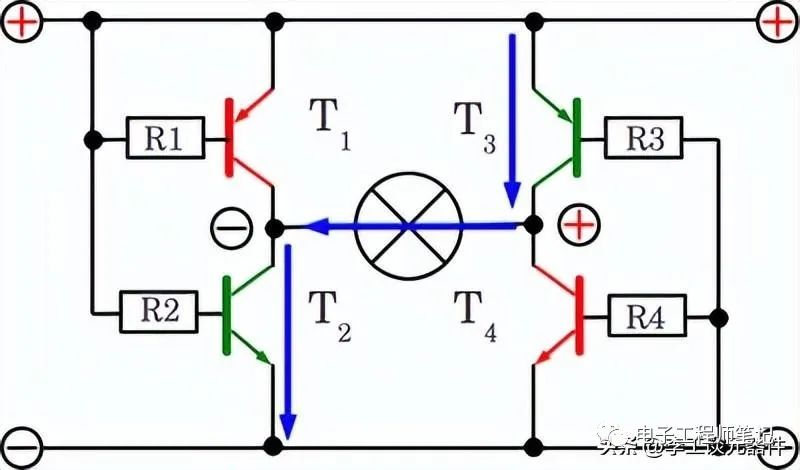
X1和X2连接到正电源电压,同时X3和X4连接到地
3、4个输入钳位连接到地
将所有4个输入钳位连接到地时,上方的PNP晶体管导通,而下方的NPN晶体管关闭。负载2个钳位处的电位几乎等于正电源电压,因为没有电流流过负载。
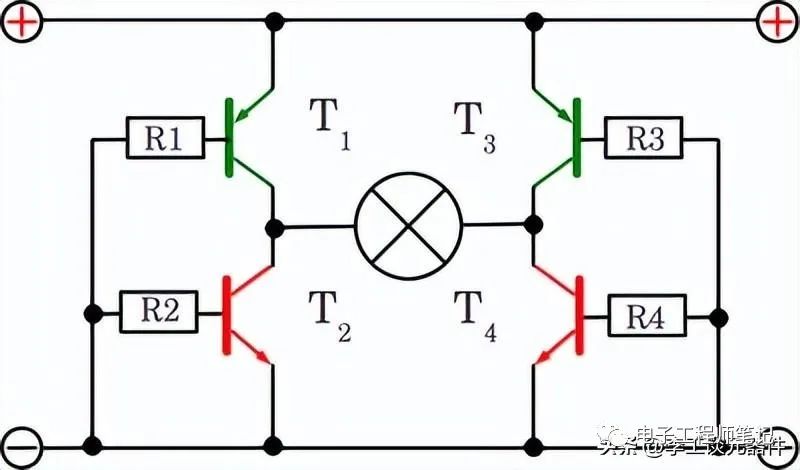
4个输入钳位连接到地
4、4个输入钳位连接到电源电压的正极端子
将所有4个输入钳位连接到电源电压的正极端子时,上方的PNP晶体管关断,而下方的NPN晶体管导通,负载两个钳位处的电位几乎等于负电源电压,因此也没有电流流过负载。
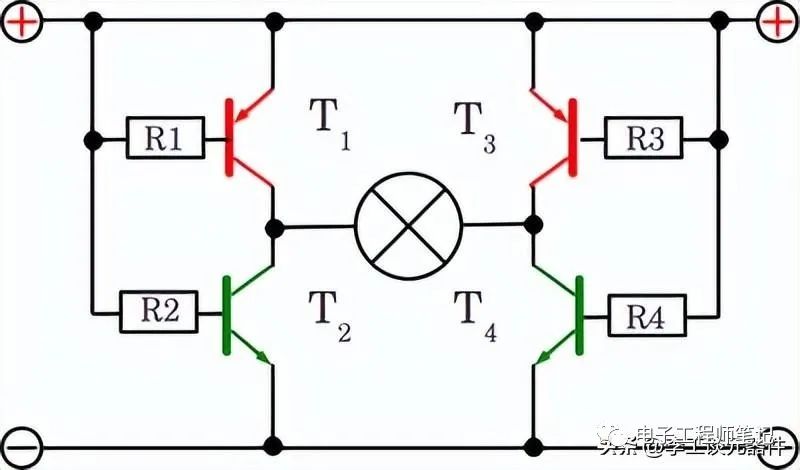
4个输入钳位连接到电源电压的正极端子
5、通常只有2个输入钳位
2个输入钳位
| + | - | 负端子位于负载左侧 |
| - | + | 负端子位于负载右侧 |
| + | + | 负载两端无电压 |
| - | - | 负载两端无电压 |
| X1 | X2 | 输出 |
|---|
五、半桥H桥电路
由4个晶体管组成的H桥电路称为全桥。因此由2个晶体管组成的H桥电路为半桥。对于分离电源,半桥就可以控制交流负载,下图种使用了2节电池。
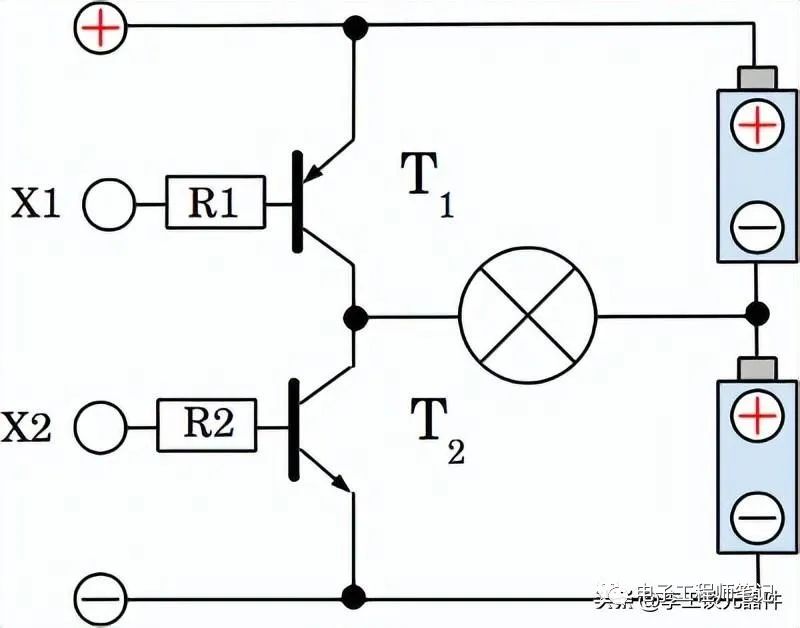
半桥H桥电路
1、2个晶体管的基极引脚通过串联连接到正极端子
如果2个晶体管的基极引脚通过串联连接到正极端子,因此输入端有一个高信号,上方的PNP类型将关闭,而下方的NPN类型将打开。电流从下部电池的正极端子流出,从右向左流过负载,并通过晶体管T2在负极端子处重新进入电池。
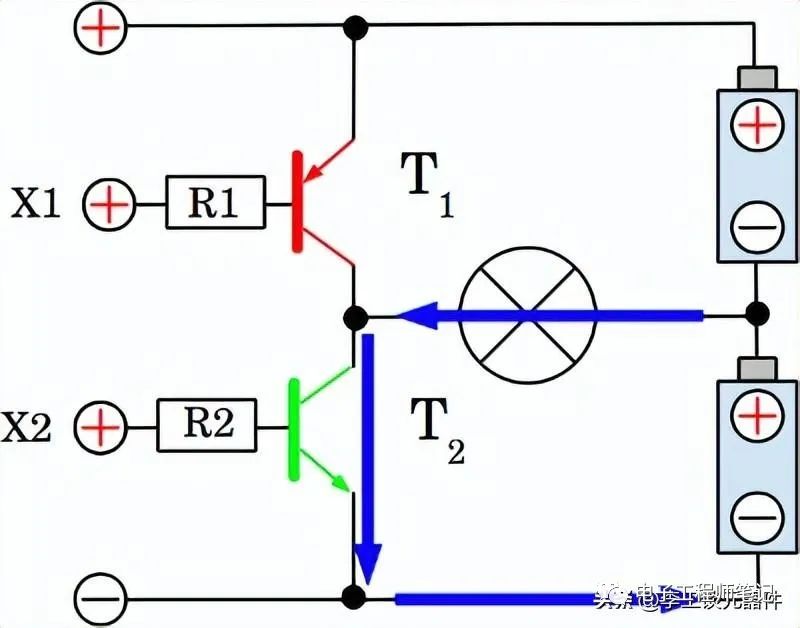
2个晶体管的基极引脚通过串联连接到正极端子
2、半桥的2个输入连接到负端子
如果半桥的两个输入都连接到负端子,则上方的NPN类型将打开,下方的NPN类型将关闭。电流从上部电池的正极端子流过晶体管T1,现在从左向右流过负载,然后返回电池的负极端子。使用半桥的优点时所需晶体管数量少,缺点是电源更复杂。
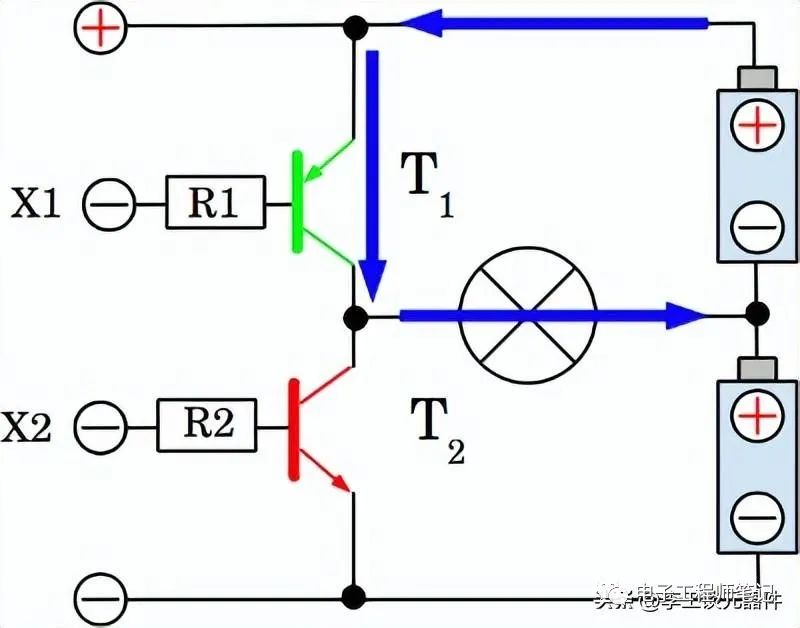
半桥的2个输入连接到负端子
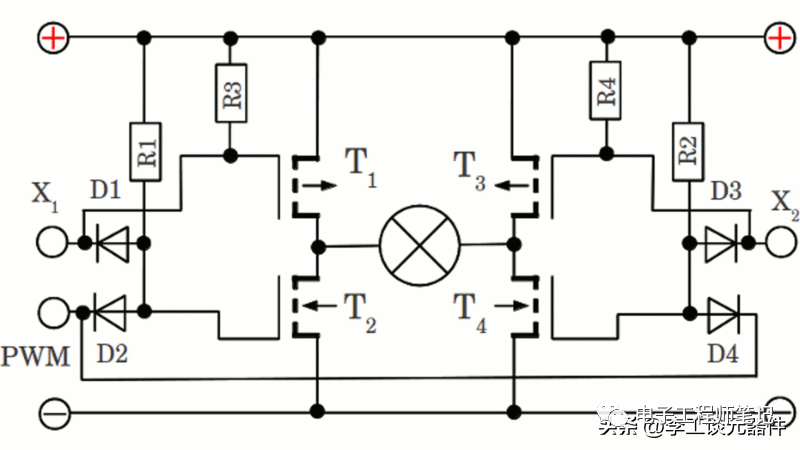
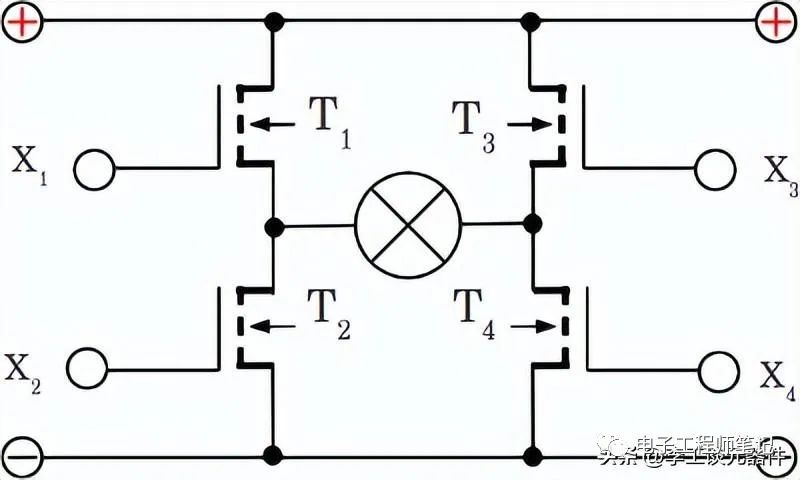
六、MOS管组成的H桥电路
当使用MOS管组成H桥时,必须考虑使晶体管进入饱和模式所需的基极电流。R1-R4的尺寸取决于电源电压。当电路的输入电压为12V而不是6V时,电阻值必须要加倍。如果电阻值适用较高的电压,则电阻消耗的功率也会加倍,否则会增加4倍,因此必须要牢记最大功耗。
使用N沟道和P沟道MOS管代替NPN或PNP类型也有一些好处。
仅需要两个上拉或下拉电阻,并且 R1 和 R2 的值并不重要,只需使用相对较高的值即可避免在接近最大功耗的情况下工作。
电路的最小输入电压受到可靠“导通”MOS管所需的源极栅极电压的影响(必须略高于阈值电压 V GS(th))。
最大输入电压应明显低于最大源极栅极电压,以避免在极限下运行。切换感性负载时请记住电压峰值。
MOS管组成的H桥电路
如果电源电压超过MOS管的最大源极栅极电压,则应插入4个分压器,每个分压器由齐纳二极管和恒定电阻组成。齐纳电压必须大于导通晶体管所需的阈值电压。
现在,最大源极漏极电压通常明显高于最大源极栅极电压,限制了电路的输入电压。
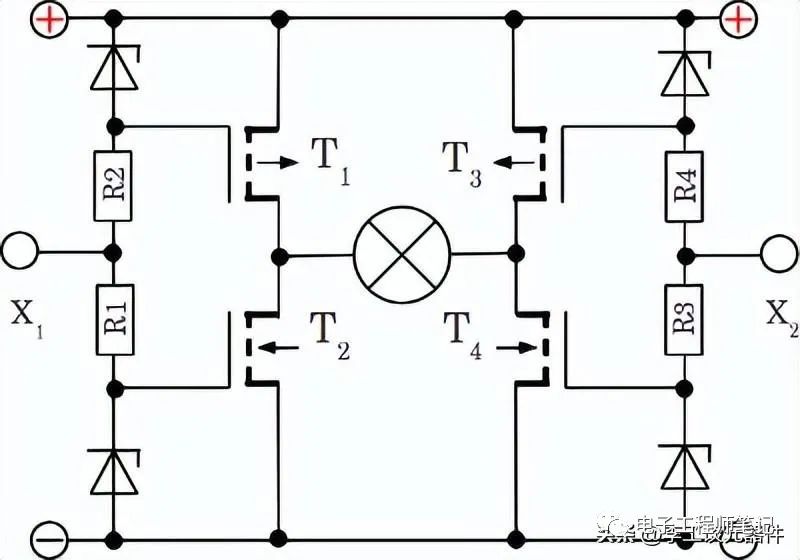
如果电源电压超过MOS管的最大源极栅极电压,则应插入4个分压器
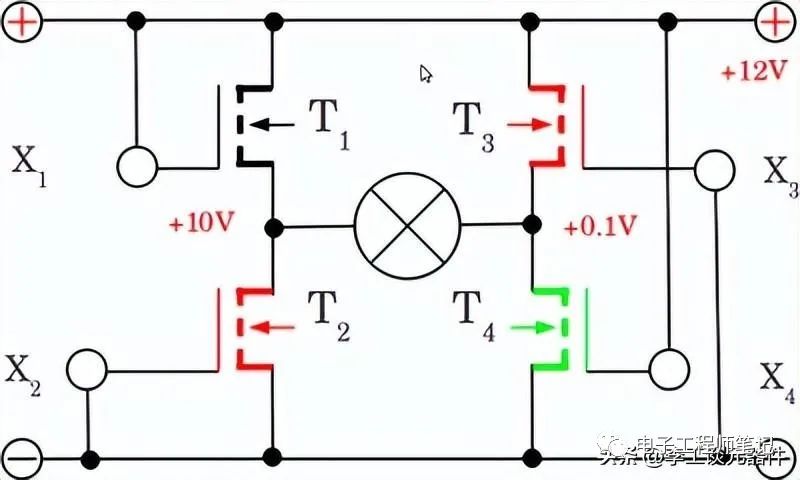
钳位器必须始终连接到正电源电压或者负电源电压。如果X1连接到正电源电压,而X2仅连接一半电源电压(+6V),则T1和T2之间的电位接近0V,T3和T4之间的电位约为6V,因为T3的电阻等于T4的电阻。总之负载上从左到右有6V的电位。
但这里要记住,T3和T4的电阻相对较低,因此高电流电流过电阻的右侧,
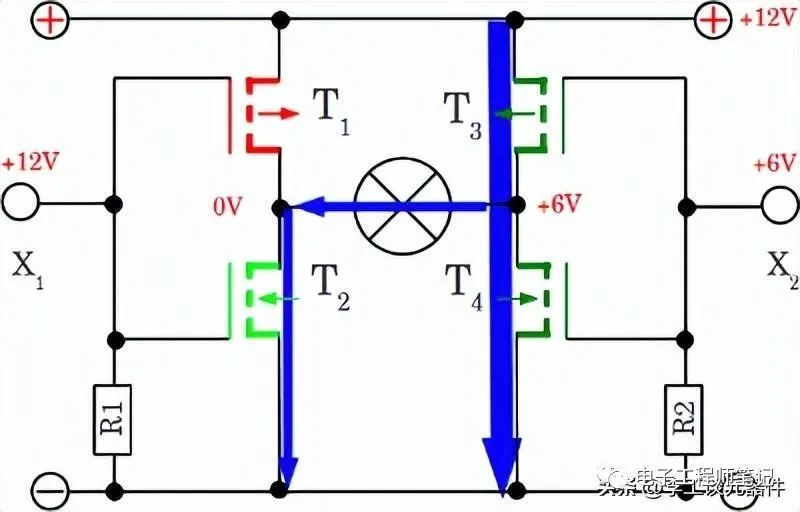
X1连接到正电源电压,而X2仅连接一半电源电压(+6V)
在H桥开关运行器件,意味着只要其中一个钳位处的电位从正电源电压变为0(反之亦然),总会有高电流在短时间内流过电路的支路,重叠的导通时间称为交叉传导或者直通。
1、由曲线性RC电阻实现的开启延迟
每当X1处的电压从正电源电压变为0V时,C1就会通过R1缓慢充电,因此T1的导通过程倍延迟,相反,C2通过正向偏置D2快速放电,因此T2几乎没有延迟地关闭。R5和R6是下拉电阻。
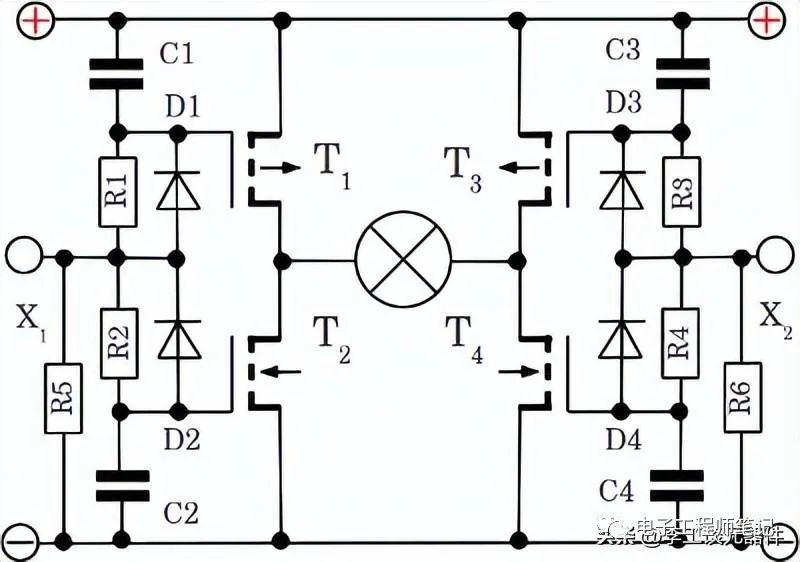
由曲线性RC电阻实现的开启延迟
两个线性RC电路(每个电路由47KΩ电阻和1nF电容组成)延迟MOS管的开启过程,高侧MOS管(黄色曲线)立即关断,因此C1的放电电流流过正向偏置二极管(D1)。由于C2的充电电流流经R2,低侧MOS管的导通过程被延迟。在信号的下降沿,低侧MOS管(红色曲线)的关闭过程比高侧MOS管的开启过程更快。因此现在D2正向偏置。
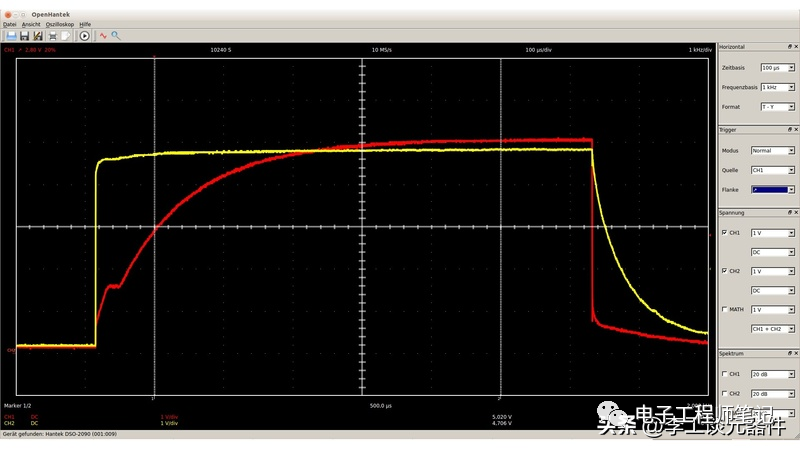
两个线性RC电路(每个电路由47KΩ电阻和1nF电容组成)延迟MOS管的开启过程
七、脉宽调制H桥
如果负载需要部分功率,可以通过脉宽调制来控制H桥。为了避免脉宽信号开关运行期间发生交叉传导,必须更改电路,如下图:
脉宽调制H桥
P沟道MOS管仍然由X1和X2处的信号直接开关,而N沟道MOS管分别由X1和脉冲宽度信号X2和脉冲宽度处的信号控制信号。
如果正电源电压连接到X1,则T1被关闭,直到脉冲宽度信号也处于高电平时,T2才会接通。如果其中一个钳位接地,T2将关闭,因为D1和D2或者2者正向偏置,拉动T2的栅极接地。另一方面,如果X1处于低电平,则即使脉冲宽度信号也是如此。利用X1和X2,可以控制负载两端电压的极性,而功率控制则通过第3个输入钳位处的脉冲宽度信号来完成。
二极管形成一个与门。每当改变极性时,如果脉宽信号处于高电平,就会发生击穿,在改变极性之前,确保PWM信号设置为低电平。
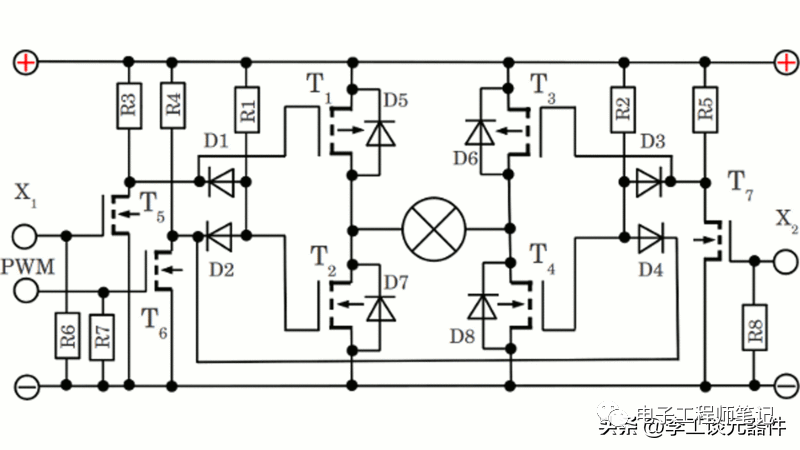
八、电压电平转换H桥
当H桥在12V输入电压下运行时,输入钳位的高电平必须为12V,例如:计算机仅提供5V或者3.3V的输出电压,解决问题的办法是插入3个放大电路:
电压电平转换H桥
通过使用MOS管,流经输入钳位的电流最小化为流经下拉电阻R6-R8的电流。请记住,电压电平会被放大级反转。例如:脉冲宽度信号输入钳位的高电平在D2和D4处变为低电平。因此在低电平需要脉冲宽度信号的电平来为H桥中点之间的负载供电。
反之亦然,在改变H桥的极性时,需要脉冲宽度信号处于高电平以防止交叉导通。
九、反激二极管H桥
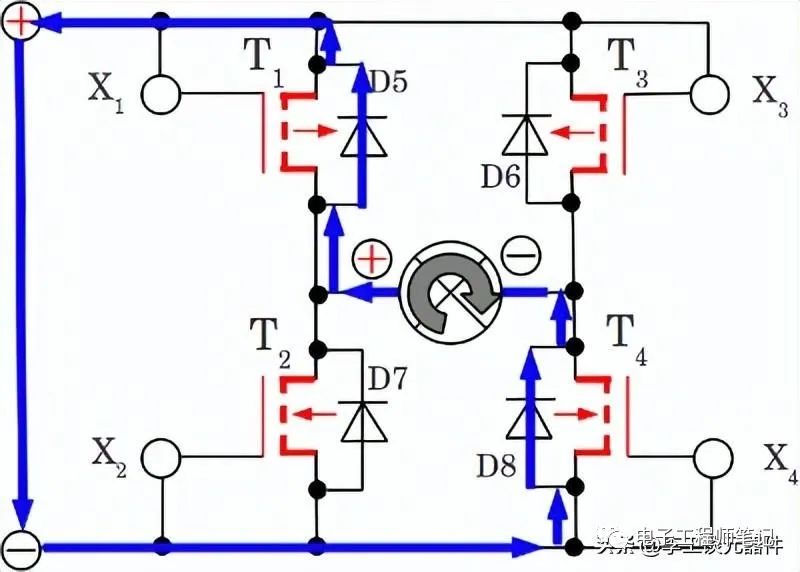
反激二极管可以用于最大限度地减少感性负载引起的失真。这些二极管必须与负载相连,但极性相反。当使用H桥控制负载时,极性可以改变,因此二极管将变得正向偏置,为了避免这种清理,需要4个二极管才能在单个开关上产生单个反击二极管所需的效果:
反激二极管H桥-4个二极管
如果感应电压的正电位位于负载左侧,则流经 D5 和 D8 的电流将消除电压尖峰。反之亦然,如果正电势在右侧,负电势在左侧,则电流流经 D6 和 D7。二极管的最大电流不应低于 MOS管的最大漏极电流。
正向偏置肖特基二极管的电压降(0.15-0.45V)低于硅类型二极管(0.6-1.7V),因此器件消耗的功率明显较低。
上面H桥电路的元件:
T1、T3 = P 沟道 MOSFET IRF9Z34N
T2、T4 = N 沟道 MOSFET IRLZ24N
T5 - T7 = N 沟道 MOSFET 2N7000
R1 - R8 = 12kΩ
D1 - D4 = 低功耗硅二极管
D5 - D8 = 肖特基二极管 例如 SB2040
电路可以在5-12V的电源电压下工作。输入钳位处的电压电平应高于 3V。当晶体管在没有散热器的情况下运行时,通过负载的电流应低于 5A。
十、控制简单
当移除X2处的下拉电阻并将这些输入钳位连接到T5的漏极引脚(T5是用于放大X1信号的MOS管)时,两个输入引脚可以控制H桥。
X1控制H桥的极性:正极在负载左侧,X1接高电平,正极在右侧,X1接低电平等级。第二个引脚是脉宽信号,用于控制提供负载的功率。
H桥的输入钳位越少,控制设备所需的计算机或者微控制器的输出钳位就越少。缺点是灵活性较低。
移除X2处的下拉电阻并将这些输入钳位连接到T5的漏极引脚
十一、动态制动H桥
为了激活制动力能,至少需要三个输入钳位(X 1、X 2和PWM)。
当通过H桥开关电动汽车的电机时,必须考虑反激二极管的另一个影响:由于惯性,如果不再向电机提供动力,车辆不会立即停止。电机继续旋转并开始作为发电机运行。
由此产生的感应电压的极性与预先施加到电机上的电压的极性相同。流经反激二极管和电机绕组的电流现在正在减慢车辆的速度,请记住机械能会转化为电能。这些过程称为动态制动。
所产生的电力的一部分作为热量消散在反激二极管和电机电线中,而其余部分则返回到电源线。需要更复杂的电路来安全地返回所产生的电力到车辆的电池,这称为再生制动。
没有反激二极管,动态制动可以由 H 桥控制:如果所有晶体管都“关闭”,则没有电流流过电机的绕组,因此车轮会旋转,而不会因动态而减慢速度制动。
当然,必须考虑感应电压的峰值。要激活动态制动过程,必须“打开”两个低侧或两个高侧 MOSFET。
现在,电机的夹具之间存在一条导电路径,车辆在发电时会主动减速。电力在晶体管和电机电线中以热量的形式耗散,这就是为什么这种制动被称为变阻制动。
变阻制动。
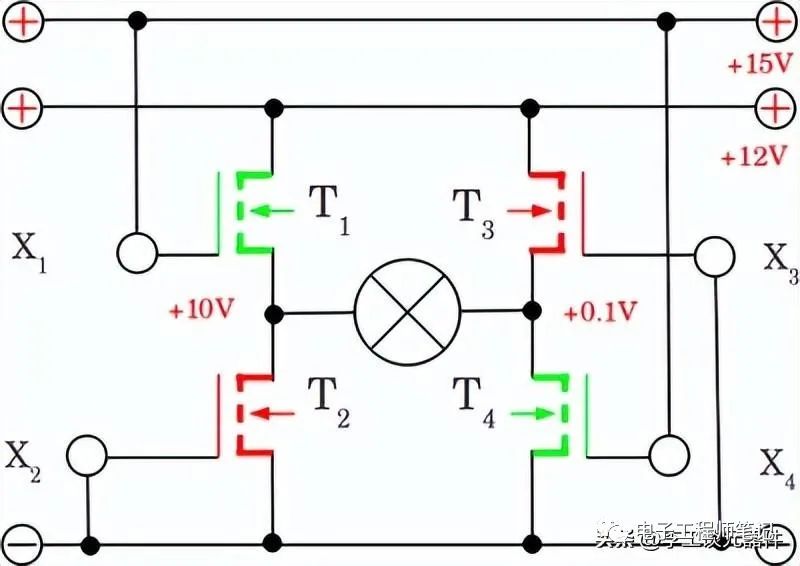
十二、N沟道 MOS管H桥
p 沟道 MOSFET 的主要载流子是空穴,其迁移率低于电子(n 沟道类型内部的主要载流子)。因此,假设器件尺寸相同,p 沟道 MOSFET 的导通电阻通常高于 n 沟道 MOSFET 的导通电阻。
为了最大限度地减少 H 桥消耗的功率,可以使用四个 n 沟道 MOSFET,而不是在低压侧使用两个 n 沟道类型和在高压侧使用两个 p 沟道类型。
N沟道 MOS管H桥
假设电路连接到输出为 +12V 的电源。X 3接地,因此T 3被“关闭”。X 4连接到+12V,因此T 4被“接通”。右侧中点电位接近0V。
左半桥的情况很棘手:X 2接地,因此 T 2被“关闭”。X 1连接到+12V,那么T 1的源极和栅极之间的电位是多少?
如果 T 1“接通”时,左半桥中点的电位约为 12V。因此T 1的源极和栅极之间的差值接近0V,使T 1 “关闭”。如果T 1和T 2都“关闭”,则中点处的电势将约为+6V,导致T 1处的源极栅极电压为6V ,这足以将这些器件“打开”。所以真相是在两个极值之间。
如果n沟道MOSFET的阈值电压约为2V,则系统将在T 1部分“导通” 时在中点趋向于约10V的电势。
T
为了能够完全“导通”T 1,高端 MOS管 的栅极引脚处的电位高于 14V(12V + 2V 阈值),因此需要第二个电源。驱动 MOS管的电路比高端 p 沟道 MOSFET 组成的 H 桥更复杂。
完全“导通”T 1,连接第二个电源
审核编辑:汤梓红
全部0条评论

快来发表一下你的评论吧 !

