

摘要:
为了满足某大型旋转机械设备在监测过程中实时性高精度多通道的采集需求,提出了一种基于FPGA的多通道振动信号采集检测系统的设计方案。系统采用主/从式FPGA架构,在强噪声环境下实现了采样频率为100 kHz的128通道并行实时数据采集功能。然后通过设计一种参数可调的随机共振信号检测系统,提高了信号信噪比,增强了系统在旋转环境下检测的准确性。经测试验证,该系统具有良好的实时性、稳定性和有效性。
0 引言
随着现代工业的飞速发展,人们对旋转设备的需求愈加迫切,如风力发电、大型炼钢设备等旋转设备的应用。大型旋转机械设备虽然极大地提高了生产率,但其突发性的故障率偏高,一旦停机就会造成较大的损失[1]。加强对旋转机械的状态检测和诊断工作,有助于减少旋转机械故障率,大幅度降低机械的维修费用和缩短维修时间,提高设备运行的经济效益。传统的多通道振动信号采集系统多以DSP和ARM作为控制核心,存在功能简单、通道数少、时钟频率低和实时性差等缺点[2-3]。 与DSP和ARM相比,FPGA在数据采集领域发挥着重要的作用。FPGA具有时钟频率高、内部延时小、运算速度快、开发周期短、抗干扰能力强、编程配置灵活、内部资源丰富等优点,非常适用于数据高数采集和处理[4-6]。本文提出了一种基于主/从式FPGA架构的128通道振动信号检测方案,系统采用了高精度A/D芯片AD7606,同时结合了FPGA的并行数据处理能力实现了采集信号的随机共振检测,保证了采集系统的准确性和稳定性。
1 系统总体设计
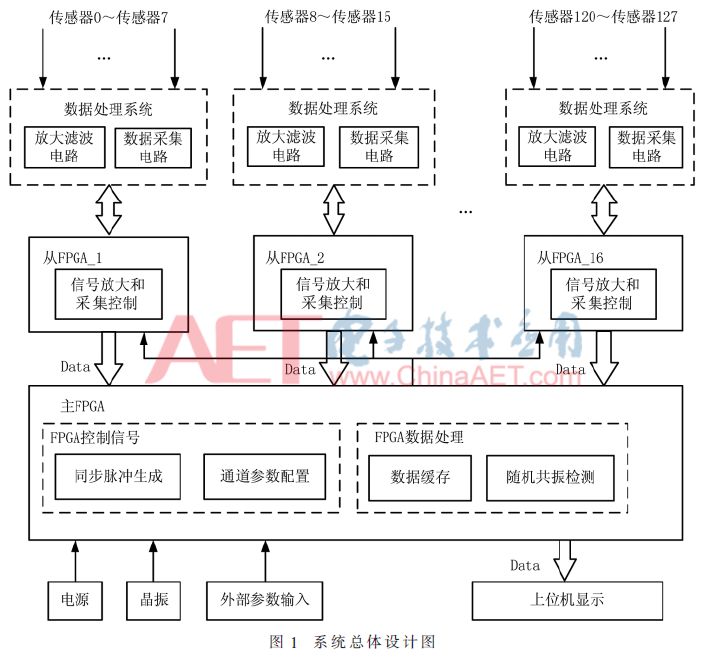
本系统总体设计如图1所示,系统由信号调理系统、FPGA控制系统和FPGA数据处理系统三部分构成。其中信号调理系统由放大滤波电路和AD7606采集电路构成,主要实现将传感器发出的微弱信号进行放大和滤波后发送到AD7606芯片中,将采集到的模拟信号转化为数字信号。FPGA控制系统由主FPGA控制系统和从FPGA控制系统两部分组成。从FPGA控制系统由16片Xilinx公司生产的Spartan3系列的FPGA构成,主要实现程控放大器AD8250和AD8253的信号放大控制和AD7606同步数据采集控制。主FPGA控制系统由Xilinx公司生产的Spartan6系列的FPGA构成,主要实现参数配置、同步时钟生产、数据缓存等。FPGA数据处理系统由主FPGA实现数据的时序约束和随机共振检测处理功能,通过采用主从式FPGA架构,合理分配FPGA资源,完成整个系统的任务调度,克服FPGA输出时的亚稳态现象,使得系统具有性能稳定、数据处理能力强、抗干扰性好等特点。
2 部分硬件电路设计
2.1 信号调理电路设计
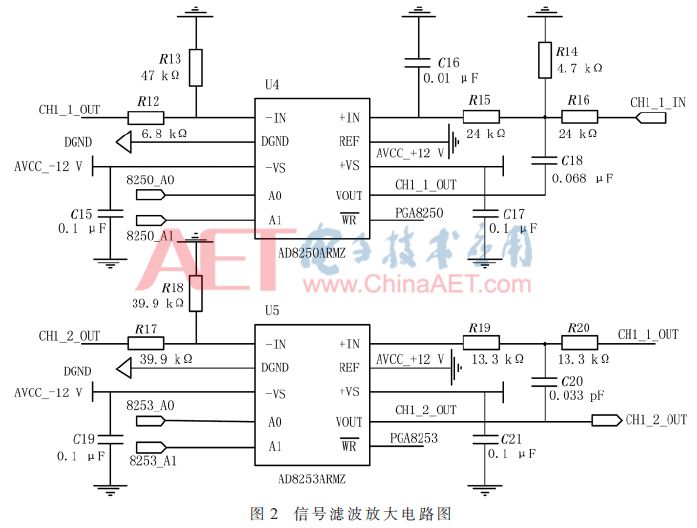
由于传感器输出信号范围包含±0.025 V、±0.05 V、±0.1 V、±0.5 V 4个挡位,为保证采集精度,不能同时对整个量程进行放大,需要采取分级放大的方式,且增益可调。本系统采用图2所示的两级放大电路结构,由于系统通过滑环进行供电,在强噪声环境下传感器输出信号首先利用AD8253和AD8250实现四阶的巴特沃斯低通滤波器提高信噪比。
2.2 AD7606采集电路设计
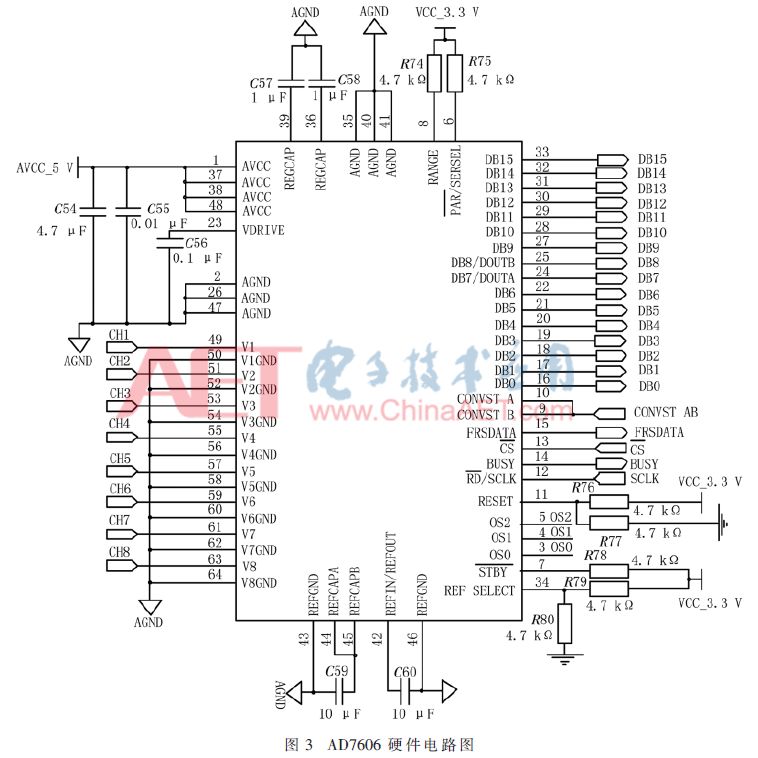
A/D数模转换器是整个采集系统的核心,影响着系统的采集精度、采集速率和数据吞吐量,所以A/D芯片选型是采集系统中最关键的一步。系统采用ADI公司的高精度、低功耗、电荷再次分配逐次逼近型模数转换芯片AD7606。该产品是一款8通道16位真差分具有二阶抗混叠模拟滤波电路的同步采样模数转换芯片。本系统采用16片AD7606芯片构成128通道的数据采集电路。AD7606硬件电路设计如图3所示,将转换芯片CONVST A与CONVST B短接在一起并施加同一个转换信号能够实现8通道的数据同步转换。
3 软件设计
FPGA软件设计主要划分为主FPGA控制系统和从FPGA控制系统两部分。其中,主FPGA控制系统主要完成同步时钟生成、参数配置、数据缓存、随机共振检测等功能。而从FPGA主要完成数据组帧、程控放大控制和AD7606数据采集控制等。下面对部分核心模块的设计进行介绍。
3.1 数据采集模块
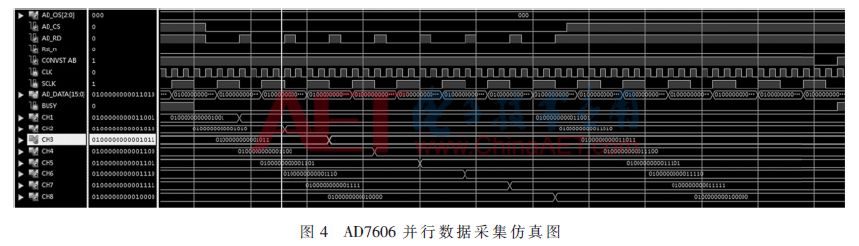
传感器产生的微弱信号经过滤波放大电路后,将其输送入AD7606芯片实现数据采集功能。FPGA主要控制AD7606的转换信号CONVST AB、片选信号CS和时钟信号SCLK,实现芯片的采样率调整和采样启停功能。如图4所示,本模块通过控制AD7606工作在并行数据输出模式下,实现了系统在旋转环境下采样率为100 kHz的高速采集功能。从仿真图中可以看出,采用并行输出的方式能够稳定有效地将模拟信号转换为数字信号进行处理,经过多次测试表明,通过采用并行数据输出的方式,该芯片的采样误差小于0.1%。
3.2 数据缓存模块
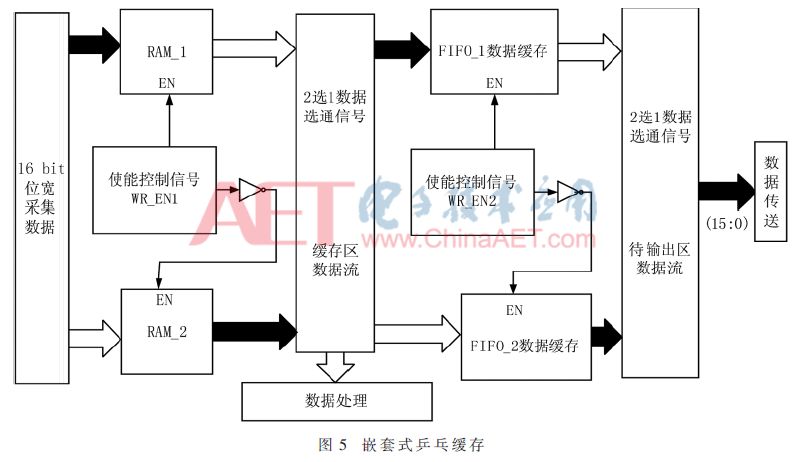
由于本系统为128路振动信号采集系统,每完成一次采集会产生大量的待处理数据,因此,设计了一种嵌套式的乒乓传输缓存方式,实现系统所需实时性数据采集功能。相比于传统的乒乓式缓存[7],其效率更高,实用性更强。如图5所示,本模块有效地利用FPGA内部IP核资源产生两个不同的块随机存取存储器(Random Access Memory,RAM)和先入先出队列(First Input First Output,FIFO)进行嵌套式的乒乓缓存。通过设置两个不同的使能信号WR_EN1和WR_EN2,实现了块RAM_1、块RAM_2之间的乒乓缓存和FIFO_1、FIFO_2之间的乒乓缓存。如此周而复始,构成了嵌套式乒乓缓存。通过数据缓存模块可以很好地协调数据流在各模块之间稳定、实时有效地传输和处理。
3.3 随机共振检测模块
由于系统处于强噪声干扰的环境下,虽然添加了四阶的巴特沃斯低通滤波电路,但在实际工程中旋转环境下还是会产生大量的无法滤除的噪声信号使有效的振动信号淹没在噪声中,无法正常检测。所以采用随机共振的检测方法,在参数匹配的情况下将能量从噪声转移到有用信号中,使得输出信噪比提高。下面依次从随机共振的MATLAB仿真和FPGA实现两个方面进行介绍。
3.3.1 随机共振的MATALB仿真
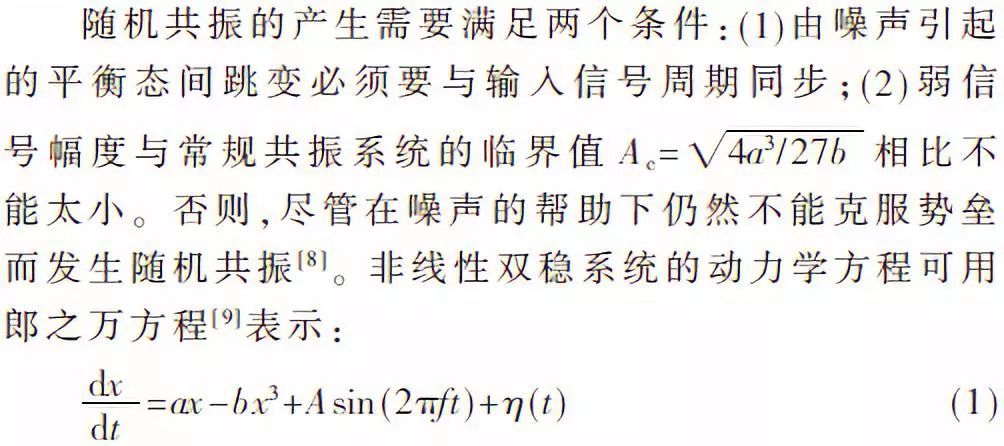
式中,a、b为非线性的双稳态系统参数,通常取a=1,b=1。
为了得到随机共振的输出,系统采用4阶龙格-库塔数值方法对式(1)进行求解[10],其算法如式(2)所示:
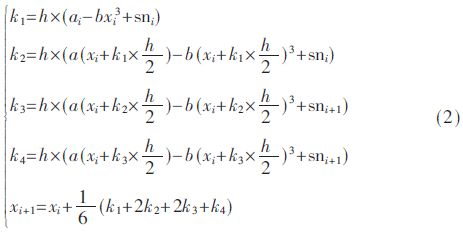
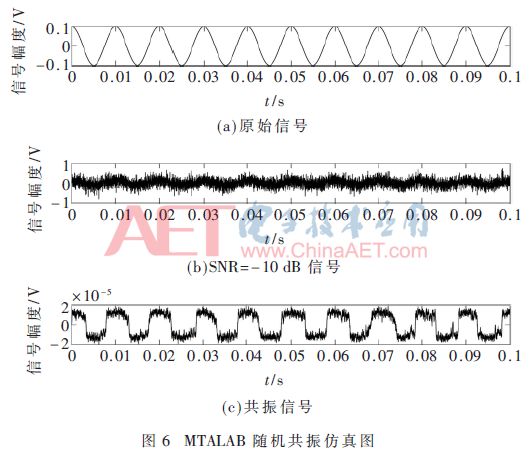
其中,xi表示x(t)的第i个采样点,sni表示对输入信号的第i个采样点,计算步长h=1/f,f是对信号s(t)=Asin(2πft)+η(t)的采样频率,k为调整系数。随机共振的MATLAB仿真图如图6所示,从上到下分别为原始有效信号、有效信号淹没在噪声中和随机共振检测输出。由仿真图可知,通过采用随机共振检测可以提高输出信号的信噪比。
3.3.2 FPGA实现随机共振检测
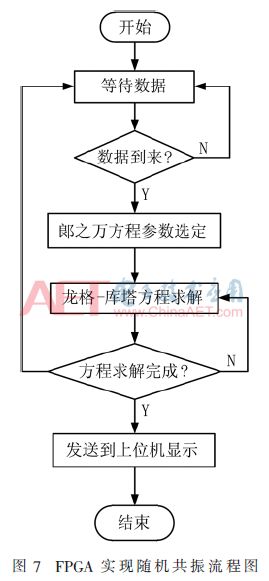
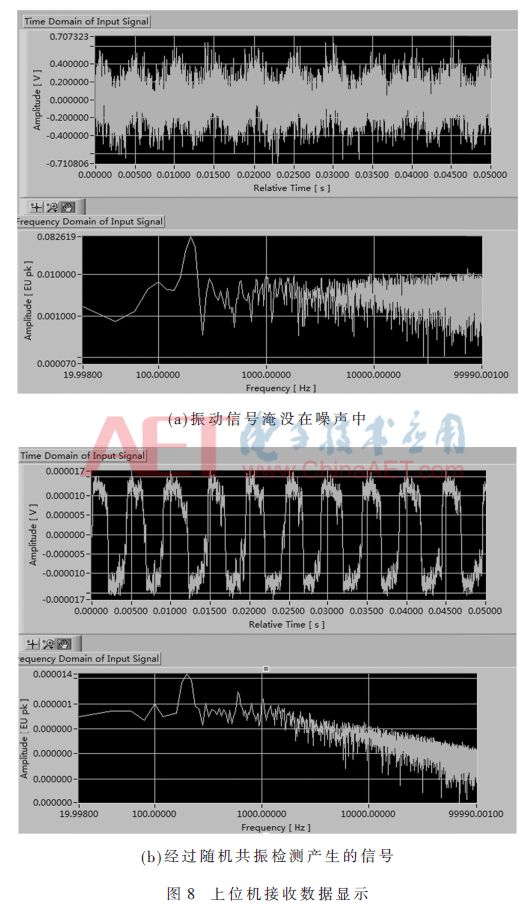
随机共振检测算法由主FPGA通过采用补码形式的定点数来实现郎之万方程的求解,系统采用4阶龙格库塔的迭代方式,利用FPGA的并行数据处理能力实现了淹没在噪声中的振动信号的随机共振检测,本模块的流程图如图7所示。将求解出的数据发送到上位机进行实时显示,图8(a)是未使用FPGA实现的随机共振检测算法,由图可知有效信号完全淹没到噪声中,无法识别。图8(b)反映淹没在噪声中的有效信号经过随机共振模块后检测出原有振动信号的频率,增强了输出信号的信噪比。
4 结论
针对旋转机械设备在强噪声环境下难以检测的问题,本文设计了一种基于FPGA的128通道振动信号采集检测系统,通过采用主/从式FPGA架构,极大地发挥出了FPGA的并行数据处理能力。系统采用了嵌套式的乒乓缓存方式,实现了数据的实时缓存和传输功能;然后,采用了FPGA在定点数补码形式下的随机共振检测,增强了传感器有效信号的信噪比,对大型旋转机械的机械损耗和断轴预判有着极其重要的作用。本系统已成功应用于某旋转机械的监测项目中,具有一定的实用价值。
作者信息:
易志强,韩 宾,鲜 龙,李 维
(西南科技大学 信息工程学院,四川 绵阳621010)
审核编辑:汤梓红
全部0条评论

快来发表一下你的评论吧 !

