

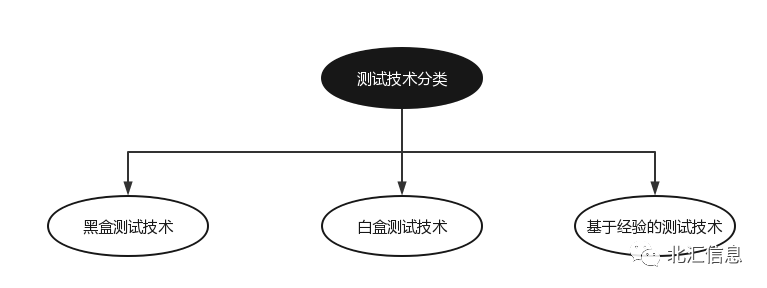
汽车行业中,任何一款产品的上线都离不开测试工作,在整个测试工作中,测试人员通过使用不同的测试技术来创建测试用例,保证测试活动的全面性和高效性。根据ISTQB可以将测试技术分为黑盒、白盒和基于经验的测试技术:
01常用测试技术分类
黑盒测试技术
黑盒测试技术(behavioral or behavior-based techniques),它不依赖于代码的实现细节,而是基于测试依据(如:正式需求文档、规格说明、用例、用户故事或业务流程)来测试被测对象的正确性和完整性,它关注被测对象的输入和输出,而不考虑其内部结构。
白盒测试技术
白盒测试技术(structural or structure-based techniques),主要通过对架构、详细设计、内部结构或测试对象代码进行分析。与黑盒测试技术不同,白盒测试技术关注被测对象的结构和处理过程。
基于经验的测试技术
基于经验的测试技术:利用开发人员、测试员和用户的产品经验来设计、实施和执行测试。这类技术通常与黑盒和白盒测试技术相结合。
以上是较为常用的测试技术分类,测试人员需要结合具体项目需求和测试目标,选取合适的测试技术来进行测试用例开发。
目前汽车行业中使用的V2X(Vehicle to Everything)技术是智能交通系统中的核心技术之一,具有广泛的应用前景。V2X技术可以让车辆之间相互通信,实时获取其他车辆的位置、状态、行驶方向等信息,同时也可以获取周围道路状况、交通信号灯、行人等信息,以此来提高驾驶安全性、舒适性和效率。
 02测试用例开发流程
02测试用例开发流程
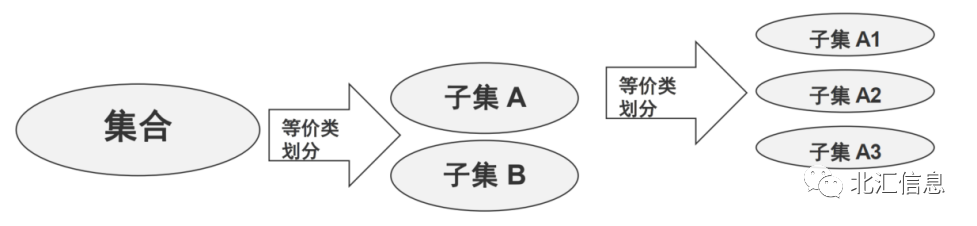
针对基于场景的V2X功能测试来说,测试用例的开发一般是由黑盒测试技术中的等价类划分和边界值分析。等价类划分和边界值分析是测试中常用的两种测试用例设计方法,它们一起使用可以更全面地覆盖输入域,在发现潜在缺陷的同时,也提高了测试的效率。目前,北汇信息在测试用例开发方面有了完整流程,大致总结为以下几个步骤:
①识别输入域:根据需求文档、功能规范或技术协议等资料,确定需要进行测试的输入域。
②等价类划分:将输入域划分为若干个等价类,每个等价类代表着一组具有相同特征的输入值。
③边界值分析:对每个等价类,确定其边界取值并分析。

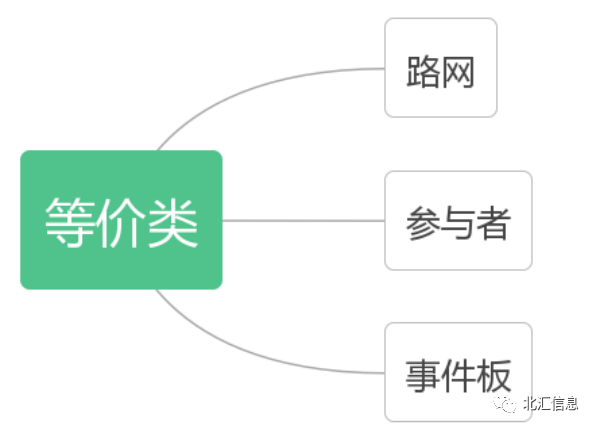
④组合等价类和边界值:针对测试需求进行功能点整理,主要是提取需求中的等价类,其提取依据是该等价类是否会对被测件的功能产生影响。等价类分为“路网”、“参与者”、“事件板”。其中,路网是指对场景运行道路的说明,包括:车道类型、车道数量、标牌类型、信号灯等;参与者指的是场景参与者,包括:车辆、行人和树木、路灯等物体;事件板是指参与者的行为,包括参与者的初始状态和运行过程中的行为变化。初始状态包括位置、朝向和速度等。然后将不同等价类中的边界值组合起来构造测试用例。
⑤设计优先级:优先级需要考虑:优先级需要考虑:功能关键性或重要程度、与安全相关的功能、功能完成度、功能当前验证条件满足性。根据测试优先级确定测试用例重要程度,并按照优先级顺序进行筛选测试用例。
下面以《合作式智能运输系统车用通信系统应用层及应用数据交互标准(第一阶段)T/CSAE 53-2020》标准中的前向碰撞预警(FCW)场景进行举例,详细介绍测试用例开发方法:
FCW功能定义:主车(HV)在车道上行驶,与在正前方同一车道的远车(RV)存在追尾碰撞危险时,FCW功能通过HMI对HV驾驶员发出预警,帮助驾驶员避免或减轻前向碰撞,提高道路行驶安全。
CSAE 53-2020中介绍了以下四种FCW的主要场景。
场景一
HV行驶,RV在HV同一车道正前方停止1)HV正常行驶,RV在位于HV同一车道的正前方停止;2)HV和RV需具备短程无线通信能力;3)HV行驶过程中在即将与RV发生碰撞时,FCW 应用对HV驾驶员发出预警,提醒驾驶员与位于正前方的车辆RV存在碰撞危险;4)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。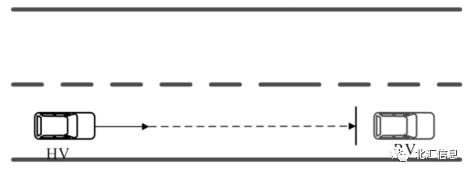
场景二
HV 行驶,RV 在HV相邻车道前方停止1)HV正常行驶,RV 在位于HV相邻车道的前方停止;2)HV和RV需具备短程无线通信能力;3)HV行驶过程中不会与RV发生碰撞,HV 驾驶员不会收到 HMI 发出的FCW预警信息。
场景三
HV 行驶,RV 在HV同一车道正前方慢速或减速行驶1)HV正常行驶,RV 位于HV同一车道的正前方慢速或减速行驶; 2)HV和RV需具备短程无线通信能力; 3)HV行驶过程中在即将与RV发生碰撞时,FCW 功能通过HMI对HV驾驶员发出预警,提醒驾驶员与位于正前方的车辆RV存在碰撞危险; 4) 预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与RV发生追尾碰撞。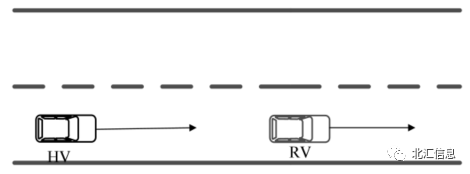
场景四
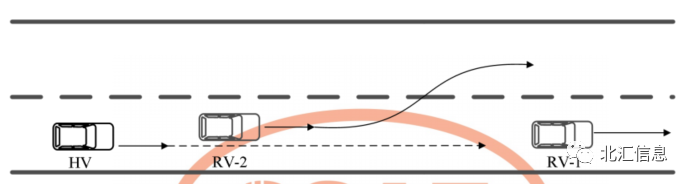
HV行驶,HV视线受阻,RV-1在HV同一车道正前方停止
1)HV跟随RV-2正常行驶,RV-1在同一车道上RV-2的正前方停止,HV的视线被RV-2所遮挡;
2)HV和 RV-1 需具备短程无线通信能力,RV-2 是否具备短程无线通信能力不影响功能场景的有效性;
3)RV-2为了避开RV-1进行变道行驶;
4)HV行驶过程中在即将与RV-1发生碰撞时,FCW功能通过HMI对HV驾驶员发出预警,提醒驾驶员与 位于正前方的RV-1存在碰撞危险;
5)预警时机需确保HV驾驶员收到预警后,能有足够时间采取措施,避免与 RV-1发生追尾碰撞。
 根据以上场景,将对FCW功能产生影响的因素通过等价类划分和边界值分析方法将其分为路网、参与者、事件板,分类如下图所示。
根据以上场景,将对FCW功能产生影响的因素通过等价类划分和边界值分析方法将其分为路网、参与者、事件板,分类如下图所示。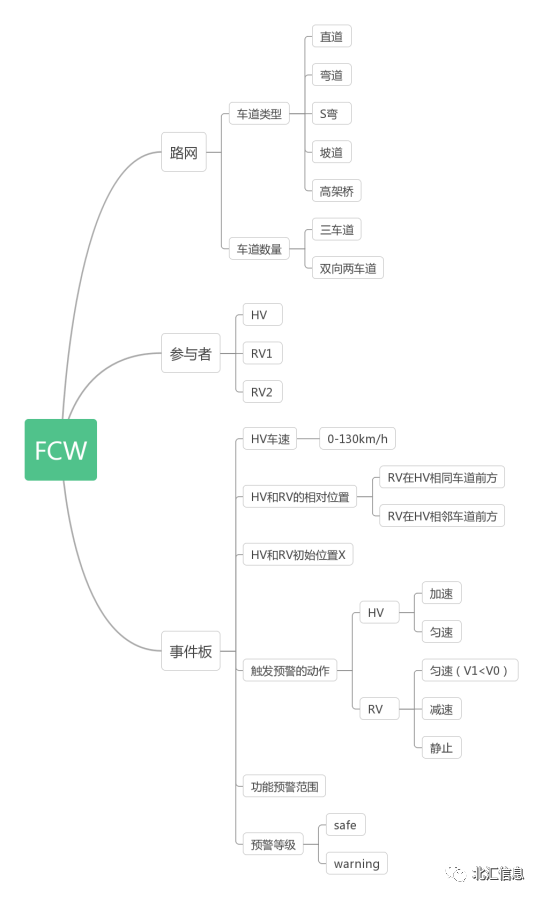 结合FCW功能文档以及测试的优先级对其组合的case进行筛选整理,最后生成完整的测试用例。
结合FCW功能文档以及测试的优先级对其组合的case进行筛选整理,最后生成完整的测试用例。
03总结
根据以上测试用例开发流程可以提高被测系统的覆盖面,进而提高测试的有效性和全面性,能够更全面地发现潜在的缺陷和问题,保障被测件功能健全。
北汇信息作为蜂窝车联(C-V2X)工作组成员,持续深耕 V2X 测试领域,测试方案覆盖终端接入层一致性、协议栈一致性、场景功能测试和信息安全测试等,为客户提供专用测试设备、成熟的测试解决方案和测试服务,让汽车变得更安全、更舒适、更智能。
全部0条评论

快来发表一下你的评论吧 !

