

1 模块说明
SG90 舵机模块如下图所示:
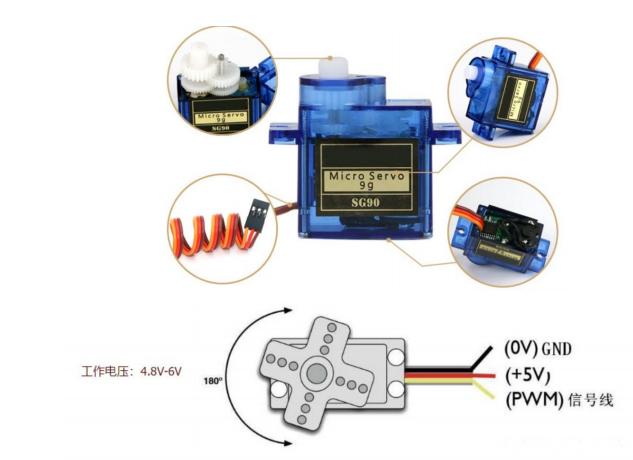
常见的舵机转向角度有 0-90 度,0-180 度,0-360 度,可以用在垃圾桶项目开盖用,智能小车的全比例转向,摄像头云台,机械臂等。
2 接线说明
SG90 舵机模块上三条线,三条线定义如下:
棕线:GND
红线:VCC 4.8V-7.2V
黄线:脉冲输入
3 程序测试
驱动模块在网盘资料“iTOP-3568 开发板\02_【iTOP-RK3568 开发板】开发资料\09_系统外设功能测试\06_V1.7 底版外设快速测试资料\13_SG90 舵机(90 度)模块\03_驱动模块”目录下下载。
首先将 pwm-SG90.ko 驱动模块拷贝到开发板的根目录,然后输入“insmod pwm-SG90.ko” 命令加载驱动模块, 然后使用命令“ls /dev/sg90”进行设备节点的查看,
然后下载网盘资料“iTOP-3568 开发板\02_【iTOP-RK3568 开发板】开发资料\09_系统外设功能测试\06_V1.7 底版外设快速测试资料\13_SG90 舵机(90 度)模块\04_测试程序”下的测试程序。将 sg90_test 可执行文件拷贝到开发板的根目录下如下图所示:
sg90 节点就是 SG90 舵机的设备节点文件,然后使用命令“./sg90_test 角度”运行 SG90 舵机模块的测试程序,
./sg90_test 90
./sg90_test 180
./sg90_test 45
会发现舵机会转相应的角度。

全部0条评论

快来发表一下你的评论吧 !

