

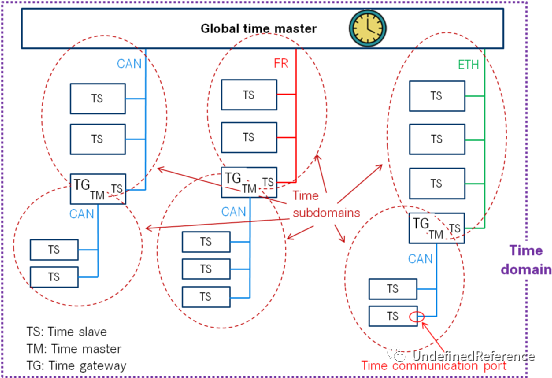
CAN时钟同步来源,AUTOSAR cp的规范,AUTOSAR定义的基于CAN总线时间同步的CanTSyn模块处理CAN总线上的时间信息分发,它以广播的形式将时间信息从master节点(TM) 传输到各slave节点(TS),还可通过时间网关(TW)将时间同步到其他子网,以解决因各ECU节点的硬件时钟信号偏差、CAN总线传输延时如协议仲裁以及各ECU节点内的软件处理等原因导致的时间延迟。网络拓扑如下:
can_tsync实现原理
有了上述基础之后,我们会理解到can timesync实现起来也不会太难,在autosar cp的框架下,所有的时间都是从StdmM(Synchronized Time-Base Manager)获取的。所以,我们可以如下伪代码:
C
// can time master
TimeRaw_t t0r;
StbM_GetCurrentTimeRaw(&t0r);
CanTsync_SetT0r(t0r);
CanIf_Transmit(sync_message);
CanTsync_TxComfirmation()
{
TimeRaw_t t1r;
StbM_GetCurrentTimeRaw(&t1r);
uint32_t t4r = CanTsync_GetT4r(t0r, t1r);
CanTsync_SetT4r(t4r);
CanIf_Transmit(fup_message)
}
C
// can time slave
TimeRaw_t t2r, t3r, t4r, t0r;
CanSync_RxIndication(sync_msg)
{
StbM_GetCurrentTimeRaw(&t2r);
t0r = CanTsync_GetT0r(sync_msg);
}
CanSync_RxIndication(fup_msg)
{
StbM_GetCurrentTimeRaw(&t3r);
t4r = CanTsync_GetT0r(fup_msg);
TimeRaw_t real_time = CanTsync_CalcuTimeOffset(t0r, t2r, t3r, t4r);
StbM_SetGlobalTime(real_time);
}
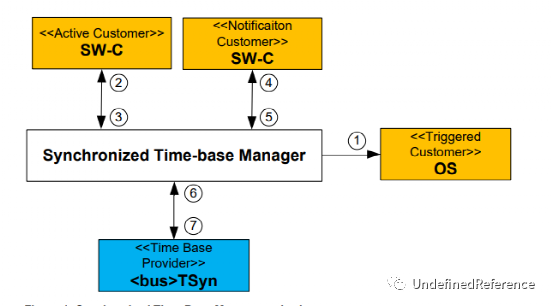
can tsync来源于autosar cp,所以上述实现风格也是仿照autosar cp的风格。StbM是整个cp的时间基础管理,负责抽象底层不同的时间同步协议,为上层提供统一的时间戳接口以及当前的时间同步状态的接口。整体框架如下:
全部0条评论

快来发表一下你的评论吧 !

