

坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理?
ROS给我们提供了一个坐标系的管理神器——TF。
机器人中的坐标系
机器人中都有哪些坐标系呢?

比如在机械臂形态的机器人中,机器人安装的位置叫做基坐标系Base Frame,机器人安装位置在外部环境下的参考系叫做世界坐标系World Frame,机器人末端夹爪的位置叫做工具坐标系,外部被操作物体的位置叫做工件坐标系,在机械臂抓取外部物体的过程中,这些坐标系之间的关系也在跟随变化。
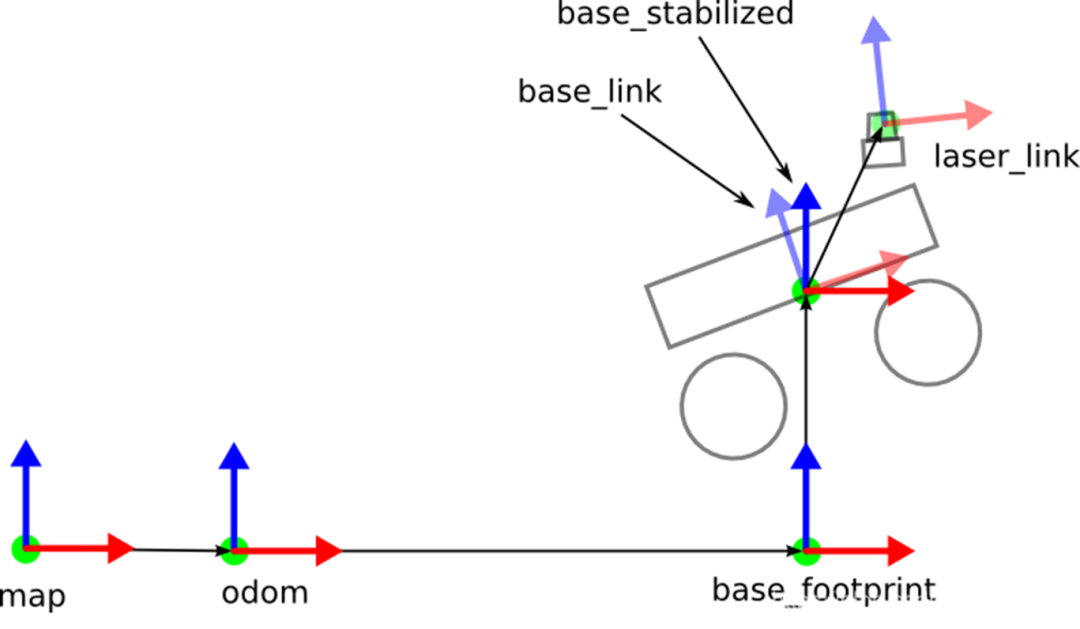
在移动机器人系统中,坐标系一样至关重要,比如一个移动机器人的中心点是基坐标系Base Link,雷达所在的位置叫做雷达坐标系laser
link,机器人要移动,里程计会累积位置。
这个位置的参考系叫做里程计坐标系odom,里程计又会有累积误差和漂移,绝对位置的参考系叫做地图坐标系map。
一层一层坐标系之间关系复杂,有一些是相对固定的,也有一些是不断变化的,看似简单的坐标系也在空间范围内变得复杂,良好的坐标系管理系统就显得格外重要。
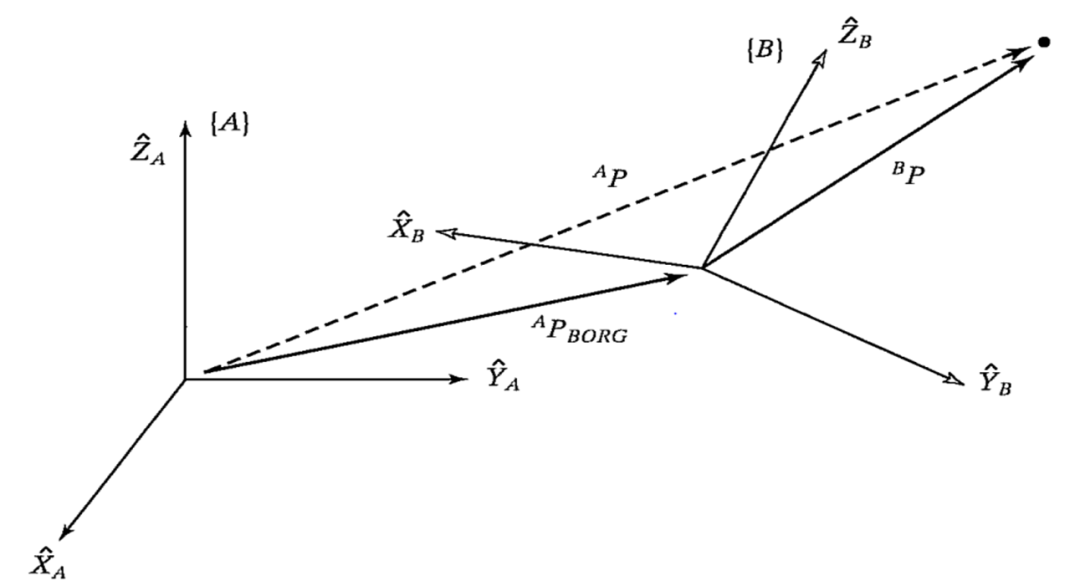
关于坐标系变换关系的基本理论,在每一本机器人学的教材中都会有讲解,可以分解为平移和旋转两个部分,通过一个四乘四的矩阵进行描述,在空间中画出坐标系,那两者之间的变换关系,其实就是向量的数学描述。
ROS中TF功能的底层原理,就是对这些数学变换进行了封装。
全部0条评论

快来发表一下你的评论吧 !

