

随着技术的进步,人们正致力于让机器视觉技术服务于更多的新应用。其中有一些应用相比于传统的机器视觉应用,有着截然不同的要求。在面对一些非传统的机器视觉应用时,由于成像系统必须适应压力、温度、冲击和振动等众多不同的环境条件,这通常会使成像系统面临严峻挑战。
无人机成像应用正在兴起。随着无人机技术的进步,成像技术也必须不断进步,以提供与人们在更传统的机器视觉应用中所期望的一致的成像性能。
随着无人机技术的进步催生了越来越多的机器视觉应用,在这些不断变化且往往恶劣的高海拔环境中成像,也将面临着诸多问题需要解决。
成像对无人机的重要性
无人机技术与成像一直紧密相连。即使是早期的商用无人机也配备了成像系统(见图1)。

图1:配备视觉功能的无人机用于农业应用。
无人机对成像的需求显而易见,因为对定位和导航的需求,要求能够看到无人机位于哪里。除非使用雷达,否则要确定无人机位置的唯一方法,就是找出它所看到的东西。然而,对无人机成像的需求,超出了简单的引导和移动。无人机上的许多应用,都使用视觉系统对大片土地进行成像——不是为了下一步该导航到哪里,而是评估环境以获得各种有用的数据。
例如,航空摄影测量是一种通过无人机上的相机系统,利用2D成像来绘制地面3D区域地图的应用。地面样本距离(GSD),即进行航空摄影测量的高度,与成像系统的奈奎斯特频率和被成像样本有关。[1]因此,高性能成像系统允许无人机在更高的高度飞行,从而获得更宽的视野,进而只需要拍摄更少的照片。目前的军用无人机技术允许无人机在50000英尺,即15.2公里的高度飞行,这为成像系统带来了诸多挑战。[2]温度和压力分别在-30~-50℃和100~20kPa之间变化(见图2)。
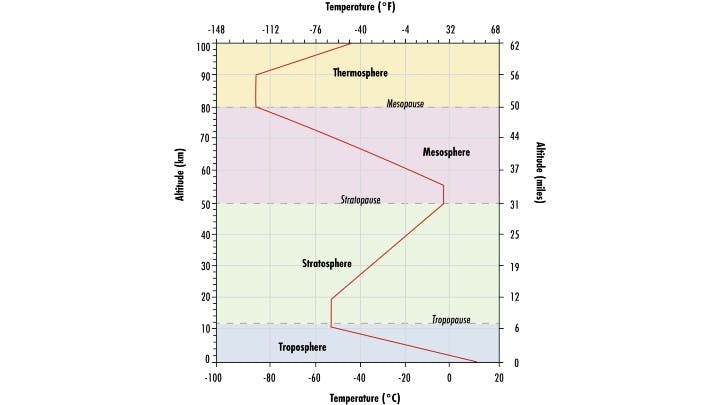
图2:大气中的温度随海拔高度的变化。(详见参考文献3)
由于温度和压力会导致镜头中的元件发生变化和偏移,因此在如此宽泛的温度和压力范围内成像变得非常困难,也使得成像系统成为了该应用的一项限制因素。找到提高机器视觉系统成像能力的方法对这项应用尤为重要,这样才能继续提高航空摄影测量的能力。[3](见图3)
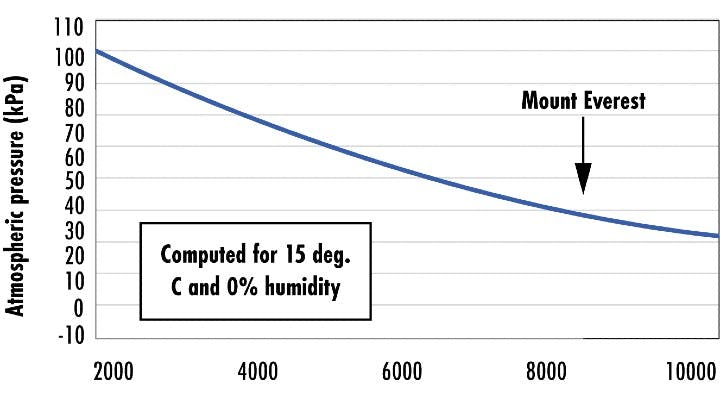
图3:大气中的压力随海拔高度的变化。(详见参考文献4)
无人机成像的另一个重要应用是:植被的多光谱和高光谱成像。多光谱成像是在多个单独的波长区域收集数据,而高光谱成像则是在一个大的、连续的波长范围内收集数据。无人机植被成像所涉及的概念与摄影测量相似,在这类应用中,海拔高度同样会显著影响成像系统,[4]但这种成像增加了对波长的重要依赖性,这使问题更加复杂。人们不仅需要设计一个在宽泛的温度和压力范围内工作的系统(这已经是一项很困难的任务),而且还需要额外设计在宽波长范围内工作、同时仍具有高光谱分辨率的系统。系统的光谱分辨率与系统可以区分的最小波段大小有关。多光谱成像具有比高光谱成像更低的光谱分辨率,但更容易设计,且往往更便宜(见图4)。
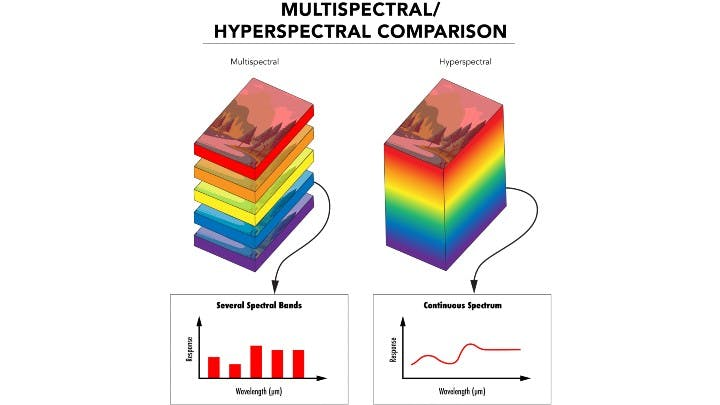
图4:多光谱成像和高光谱成像的区别在于,波长信息是离散的还是连续的。
所需的光谱成像类型因应用而异。许多植被类型在特定波长下会表现出截然不同的特性,其中大多数不在可见光谱中。这使得在多光谱成像中具有小的离散谱带,对于从2D无人机图像中收集尽可能多的信息非常有用。因此,同时具有高光谱分辨率和高成像分辨率的系统,对于这些应用是理想之选。
虽然上述提到的都是很常见的成像应用,但是无人机技术和成像技术的快速进步,正促使一系列不同的应用在军事和商业领域蓬勃发展。在军事领域,无人机在目标诱饵、一般作战任务和监视中的应用,可以减少损失,并能进行更重要的、时间敏感的行动。在商业领域,无人机正在利用摄影测量和环境成像等类似概念,为救灾、考古和采矿等应用带来更多益处,以减少时间和劳动力。
提高无人机应用中的镜头性能
如上所述,无人机飞行的高度会伴随着大量恶劣环境,所有这些都会影响镜头的性能。为了优化上述应用,需要设计高性能的成像系统,但在这种变化的条件下又很难实现。由于材料的热膨胀系数(CTE),温度的变化会导致物体物理尺寸的变化(见图5)。
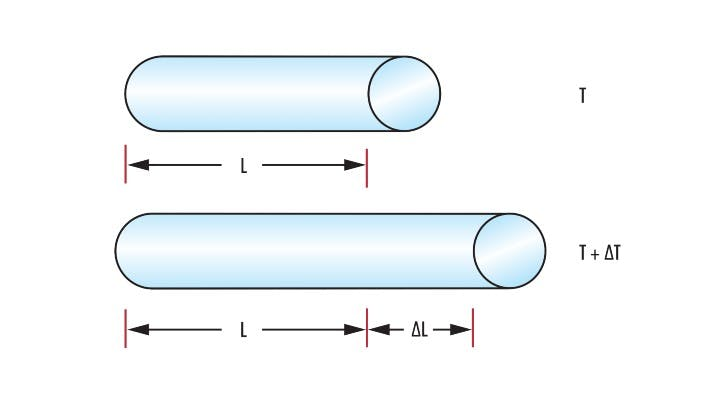
图5:由于材料的线性热膨胀系数(CTE),温度的变化(ΔT)会导致材料长度发生变化(ΔL)。
物体和材料的偏移量取决于热膨胀系数,每种材料的热膨胀系数并不相同。玻璃和金属具有不同的热膨胀系数,这为成像镜头中的元件移动带来了巨大可能性,并且会在受热或冷却时导致镜片倾斜或错位。这进而会引入像差并降低成像性能,这对无人机成像应用是一个不利因素。镜头的折射率也会随着温度的变化而变化,但这种现象对系统性能的影响,小于热膨胀引起的物理尺寸变化带来的影响。因此,最主要的目标是减少镜头组件中元件的偏移,降低镜头对错位的敏感度。
第一个问题,镜头错位,主要通过严格的镜头设计来来解决。为了在整个温度范围内保持一致的性能,镜头元件在设计上要实现“当它们偏移时,镜头中的其他元件要能够补偿这种偏移”(见图6)。
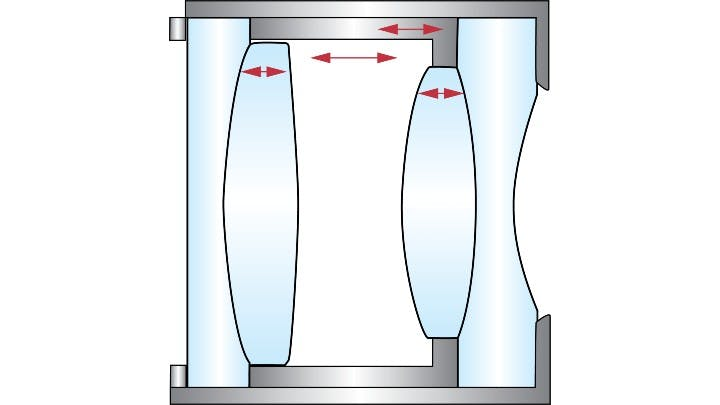
图6:镜头中,严格无热设计的收缩和膨胀补偿。
这种设计更加严格和耗时,但这是在整个温度范围内保持稳定性能的唯一方法。这通常也会是具有较少元件的设计。虽然较少的元件设计和高性能设计之间的平衡很复杂,但也并非不能实现。应该注意的是,通常还存在插入到设计中的可弯曲元件,用于释放来自金属和玻璃元件接触点上的热膨胀带来的压力。
设计一款对元件之间的移动不敏感的镜头,同样非常重要。这是镜头设计中一个相当常见的过程,因为镜头在设计中都会有公差考虑,但在公差的基础上又增加了温度变化导致的偏移问题,会使镜头设计进一步复杂化。为了降低镜头的敏感度,镜头设计师倾向于寻找“减少给系统带来显著像差”的方法。这通常是通过仔细控制成像组件中的透镜曲率半径、玻璃类型、间距和厚度来实现的。与温度相关的空间偏移和公差偏移的综合效应,使设计低敏感的镜头变得更加困难,但细心的镜头设计者使用上述技术平衡了这一点。
镜头也可以被设计为补偿与高度变化相关的压力变化。人们应该在镜头设计软件中,在不同的压力值下,准确地模拟镜头内外的空气,以准确预测这对镜头的影响,然后设计一个能够承受这些变化的镜头。
设计能承受极端冲击和振动的镜头
尽管温度、压力以及如何减轻它们对镜头的影响,是使镜头在无人机应用中成功发挥作用的重要因素,此外也可以在镜头中增加其他类型的加固方式,使镜头更加适合无人机成像中的高度变化。例如,无人机飞行中的快速加速度变化,需要对镜头进行抗冲击和抗振动加固,加固后允许成像镜头中的元件,在经受高冲击时,依然能保持相当的性能稳定性。这种加固可以通过简化机械结构和用胶水固定每个光学元件来实现,以避免镜筒中的偏移和错位。
无人机应用中需要考虑的另一个因素是入侵保护。入侵是指有不想要的颗粒,如水或灰尘等进入镜头。灰尘和水会降低镜头的成像性能,因为光线遇到这些颗粒后,会向不可预测的方向反射或折射。可以通过将镜筒内部的元件与外界密封隔离,来减轻外部颗粒物的入侵。在镜头组装过程中,还可以用惰性气体替换镜头内部的空气,这样能去除存在的颗粒,并防止其他颗粒从外部进入镜头内部。
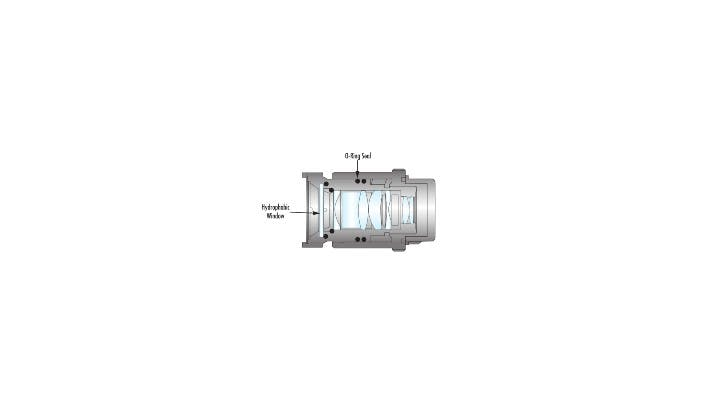
图7:入侵保护的镜头通过密封,以防止外界的湿气、灰尘和其他污染物进入镜头。
镜头入侵物保护对无人机应用尤其有帮助,因为热波动带来的一个大问题是镜头上的冷凝。当镜头中存在湿气时,水颗粒很容易粘附在镜头上,这会导致照射到镜头上的光线改变方向。这将严重降低镜头的成像性能,这也是低温成像应用的主要问题之一。如图7中所示,可以通过在镜头元件最前面装一个疏水窗口片,来进一步缓解这种冷凝问题。
除了前面提到的这些复杂情况外,无人机成像应用中还有一个重要的考虑因素——重量。为高海拔成像应用设计的镜头,重量必须尽可能的轻,这样它们就不会阻碍无人机有效飞行能力。尽管有人会认为这会使无人机成像镜头的设计复杂化,但它实际上有助于简化设计。较轻的镜头往往具有较少的元件和复杂的光学机械部件。
简化光学机械已经是设计这类镜头的常见做法,因为过多的元件和复杂的光学机械设计所需要的热补偿,对镜头设计者来说都是棘手的问题(见图8)。
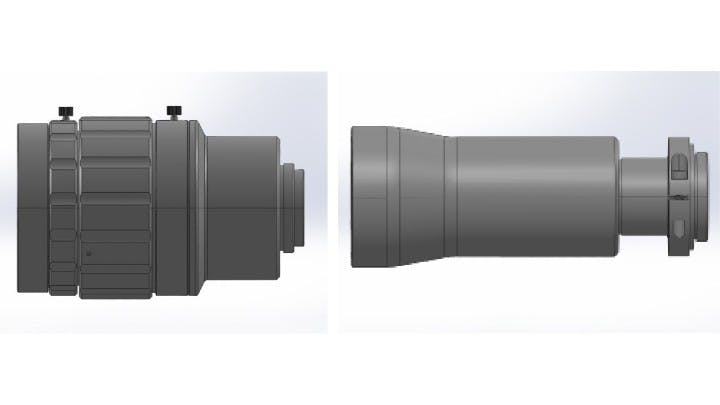
图8:标准成像镜头和具有相同焦距的较小、较轻的绝隔热镜头。
尽管将机器视觉系统应用于无人机成像等更广泛、环境更恶劣的场景中似乎令人望而生畏,但为了满足这些新的应用需求,成像界已经采用了几种有用的设计范式和技巧。无人机成像应用将是成像应用的一个巨大市场,在这类应用中,无人机飞行高度的变化会带来各种不同的环境条件,这些环境条件可能会对成像系统的性能产生不利影响。温度变化、压力变化、冲击和振动以及湿度等因素,都会对处于不断变化的高海拔环境下的成像系统带来很多问题。弄清楚如何减少这些因素对无人机成像系统的影响,可以使无人机应用更加高效和多样化。随着无人机技术的不断进步,成像系统也必须跟进发展,以匹配无人机系统中要求的机械部件能力。
全部0条评论

快来发表一下你的评论吧 !

