

控制/MCU
步进电动机因具有转子惯量低、定位精度高、无累积误差等特点,非常适合用于开环位置控制系统中。直流电机是伺服控制中常用的电机。然而在实际系统中为满足不同的功能往往同时存在多个运动部件,常用的方法是一个独立的功能对应一个控制系统,这样虽然模块性很好,但是占用了大量的系统资源和空间,也在一定程度上降低了系统的可靠性。
如在某系统中存在4 个运动部件,分别为两台三相反应式步进电动机,一台直流电机和一台四相步进电动机的控制。本着提高系统集成度的想法,本文只用一个控制芯片C8051F020 就完成了以上4 台电机的驱动控制,电路简单,可靠性高。
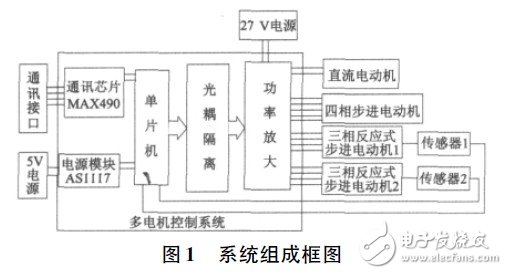
基于Cygnal 公司的MCU 控制芯片C8051F020的多电机控制系统平台,能根据控制指令完成对四台电机的控制。组成框图如图1 所示。
美国Cygnal 公司生产的C8051F020 单片机使用CIP - 51 微控制器内核。与标准的8051 结构相比,它具有如下特点:
( 1) 指令执行速度有较大的提高,峰值速度达到25 MIPS;
( 2) 除了4 个标准的8051 的端口外,还具有4 个附加端口,共64 个通用I /O 端口;
( 3) 所有I /O 端口均可配置为漏极开路或推挽输出,进一步向低功耗应用发展;
( 4) 引入数字交叉开关,允许用户自行组合通用I /O 端口和所需的数字资源;
( 5) 具有两个串行UART 接口,5 个16 位通用定时器,5个比较捕捉模块;
( 6) 具有片内看门狗、片内温度传感器和片内VDD 监视器,使用时几乎无需外扩;
( 7) 可通过JTAG 接口实现软件在线调试功能。
C8051F020 单片机以其在执行速度、系统资源等方面的明显优势,成为本多电机控制系统非常理想的选择。
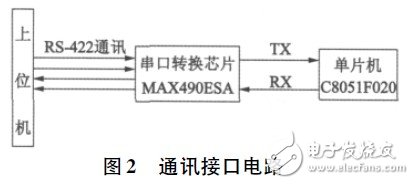
根据与上位机的通讯协议,通讯接口采用标准双向差分RS - 422 串口通讯,工作电压为5 V,波特率为38 400 bit /s.C8051F020 系列MCU 内部有两个增强型全双工UART,通讯协议为RS - 232,工作电压也为5 V.因此选用了MAX490 器件,MAX490芯片可以很方便地将上位机的RS422 差分信号转为单片机的串口信号。具体电路如图2 所示。
步进电动机的控制可采用串行控制,采用环形分配器来完成换相。也可以采用并行控制,由单片机完成步进电动机的换相,在系统资源够用的情况下,采用并行控制可以简化设计电路。本系统采用了并行控制,由软件控制单片机的I /O 端口输出按一定时序的PWM 波,来控制电机绕组通断电。
电机属于感性负载,电机绕组中的电流不能突变,电机由A 相换到B 相之后,若没有保护电路,A相绕组中的电流将保持相当长的时间,这样电机运行很不平稳。为了使电机运行平稳,在系统加入了保护措施,使绕组线圈中的电流迅速泻放,以利保护电机。图3 为电机一相的控制电路。
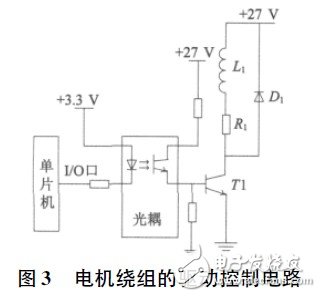
为了消除步进电动机的串扰,所有单片机输出信号均经光耦隔离。单片机输出信号为3. 3 V TTL电平,这对电机来说驱动力不够,因此采用场效应管经功率放大电路后,用来驱动电机。本系统步进电动机的驱动采用了单电压驱动方式,这种驱动电路的优点是线路简单,成本低,低频时响应较好; 缺点是存在共振,高频带载能力下降。系统要求的电机运转速度较低,不考虑高频带载能力,为解决共振问题,采用PWM 波对电机供电,通过改变电机的共振点来达到减小振动的目的。
直流电机是可以直接采用电源直接驱动的,设计直流电机驱动电路的主要目的就是对电机的转速和转向进行控制。在本系统中采用了桥式电路,如图4 所示。
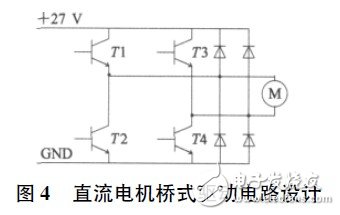
这种桥式电路非常适合用来做数字控制,只需单片机按照一定的逻辑和时序控制开关管的开通关断,就能实现直流电机的正反转,也能调节电机绕组通电的占空比,从而达到改变电机转速的目的。
本系统中选用的功率元件为IR 公司生产的IRF840 功率MOSFET,其工作电压可达500 V,工作电流最高8 A,IRF840 MOSFET 功率管的驱动功率小,工作速度高,开关时间短,热稳定性好,抗干扰能力强,完全满足系统的设计要求。
电源设计过程中为防止各种电源之间互相干扰,尤其是模拟大电源对数字电路部分产生噪声影响,充分考虑了电源滤波的需求。在电路设计时,对供电电源做滤波处理,对控制信号做光电隔离处理。
对输入电源使用单独接插件和单独电源滤波器。对信号的输入和大功率的输出,也要分别使用接插件进行物理隔离。电机运转时最大瞬时电流可高达2A.为减少大功率输出对数字电路产生影响,在设计时,采取有效的抗干扰措施,如将大功率输出信号与数字信号采取有效光电隔离。
系统的软件设计采用模块化程序设计。主程序主要完成的内容: 系统参数初始化、通讯指令解析、开启中断、进入子程序模块输出控制信号等。每个电机的不同动作均采用不同的子程序模块,维护方便。系统主程序流程图如图5 所示。
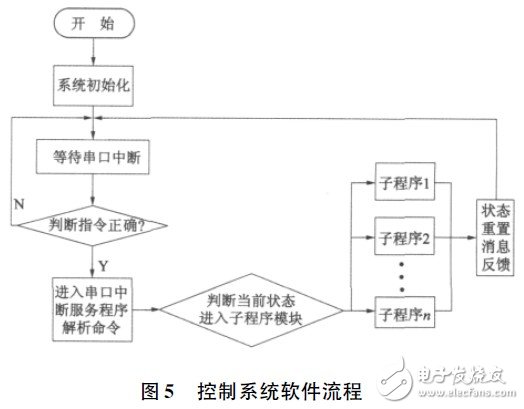
上电后,单片机程序初始化芯片的端口设置及变量初始赋值。当串口中断发生,接收上位机发来的命令消息和发送反馈消息给上位机。然后解析本次命令,按具体内容进入不同的运程序,来控制不同的电机动作。
本文所述的控制方案,在一个系统中集成了四个电机的驱动控制电路,所有功率放大单元均采用场效应管自行搭建,在小功率步进电动机及直流电机驱动控制中有较强的通用性,最大驱动电流可达6A.可以不作任何的硬件改动,仅通过重写软件,就可以直接应用在其它系统中驱动直流或步进电动机。
全部0条评论

快来发表一下你的评论吧 !

