



分享资料个
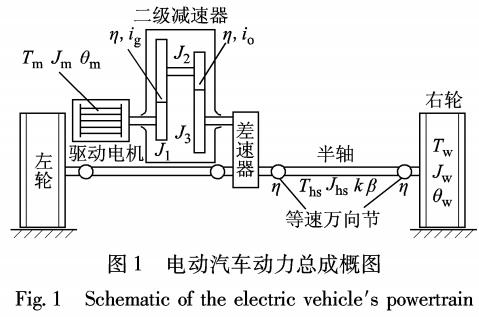
集中驱动式电动汽车的传动机构中,半轴特性会导致车辆紧急制动时利用电机进行车轮滑移率的精确控制变得困难。针对该类纯电动汽车,建立相应动力总成模型,在频域内分析电机制动力的传递特性及其对制动效果的影响;利用扩展卡尔曼滤波器进行半轴力矩的状态估计;提出两种车辆紧急制动工况下的电机一液压制动力协调控制方法,包括以液压制动为主、电机制动为辅的液压制动力动态控制方法以及以电机制动为主、液压制动为辅的半轴力矩补偿控制方法。仿真及台架试验结果表明,所提出的半轴力矩补偿控制方法可大大降低半轴特性对电机防抱死制动控制效果的不良影响,能够充分利用电机进行车辆的紧急制动;与传统摩擦制动防抱死控制相比,提升了整车制动效果,并降低了摩擦制动系统的要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
