



分享资料个
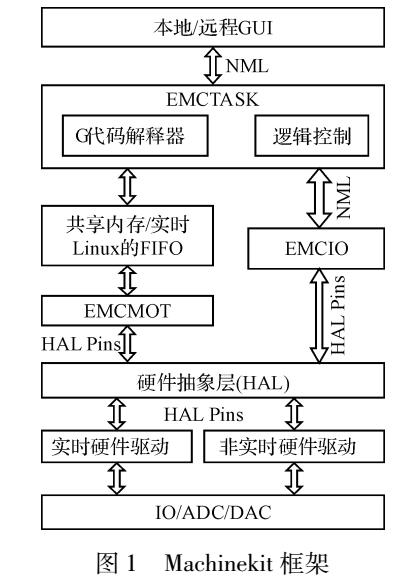
针对传统多轴控制器的结构、扩展性和实时性存在的问题,对实时Linux操作系统、Machinekit控制软件以及EtherCAT协议等方面进行了研究,对Machinekit控制软件构成进行了介绍,对实时Linux操作系统的选取原因进行了阐述,对多轴控制器的结构、实时性和稳定性进行了分析,在保证多轴控制器实时性和稳定性的前提下,提出了一种基于Xenomai和Machinekit的多轴控制器软件架构,并将实时以太网EtherCAT协议作为传输协议应用到控制器中,利用系统对伺服轴的控制进行了功能验证以及利用wireshark捕捉控制报文来对系统的实时性进行了分析测试。研究结果表明,基于Machinekit和EtherCAT的多轴控制器能够完成对多轴的本控制工作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉




全部0条评论

快来发表一下你的评论吧 !
