



分享资料个
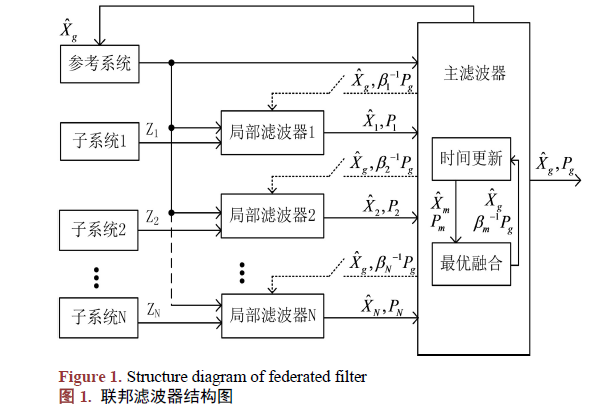
针对多传感器系统的故障检测与隔离问题,以联邦滤波结构为基础,设计了一种INS/GNSS/视觉组合导航系统,并针对系统可能出现的传感器数据软故障及硬故障,采用残差χ2算法与改进SPRT(序贯概率比检验)算法结合,对滤波残差进行故障检测,发现故障后将故障相关子滤波器进行隔离,重新构建滤波系统,将重构系统的滤波结果作为下一时刻的滤波初值。仿真结果表明,该方法能够在子滤波器发生故障时及时检测并对故障部分进行隔离,完成系统重构,在一定程度上保证系统的定位精度,提升系统的可靠性。
由于卫星导航自身存在诸多限制,未来的导航系统向着多源导航方向发展,通过对多种传感器的导航数据进行信息融合,提升系统整体导航精度以及场景适应性。这种导航系统量测信息来源于各个导航传感器,不同传感器的适用范围不同,当载体所在场景不适用于某种传感器,或传感器自身器件出现故障,都会输出错误的导航信息,进而影响到系统的性能。
导致传感器出现故障的原因很多,很难进行归纳总结,但不同故障源引起的传感器输出故障信息具有一般性,主要可以分为软故障和硬故障两类,对于不同的故障类型,有着不同的检测方式。目前多传感器导航系统比较成熟的故障检测方法主要是基于卡尔曼滤波器的χ2 检验法,包括残差χ2 检验法、状态χ2 检验法、双状态χ2 检验法。
残差χ2 检验法对于突变的硬故障具有较好的检测效果,但是不易检测出慢变故障,存在较大的延时。序贯概率比检验是残差判决中一种较为常用的方法,相比于残差χ2 检验法,该方法更适合软故障检测。JARMANKD 等人采用序贯概率比法对组合导航系统进行故障检测,针对正态分布的检测量,提出了一种改进的序贯概率比故障检测算法,采用迭代递推的方法来计算故障检验函数,对于慢变的斜坡故障具有较高的灵敏度。但也正因为采用迭代递推法,当故障消失后,由于其对缓变故障的跟踪特性,检验值需要经过一段时间恢复到阈值以下,从而无法准确判断故障的结束时间。
本文首先建立INS/GNSS/视觉组合导航系统,并对系统在无故障状态下的定位能力进行了仿真验证;之后基于残差χ2 检验法以及改进SPRT 检测法的特性,研究了残差χ2-SPRT 联合故障检测算法,该方法与单一检测方法相比,对系统软故障及硬故障均有较好的响应,在系统出现故障时,能够较快的检测出发生故障的系统,为之后的故障隔离打下基础,同时能够判断故障结束时间,完成误警率和漏警率均为0.01 时软故障及硬故障的检测。最后基于MATLAB 软件,对这种检测算法进行仿真验证,并得出相应结论,即该算法可以很大程度上削弱故障对定位结果的影响,得到与系统正常工作是相近的定位结果,提升系统可靠性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉


全部0条评论

快来发表一下你的评论吧 !
