ROS机器人硬件介绍
1.1硬件框架
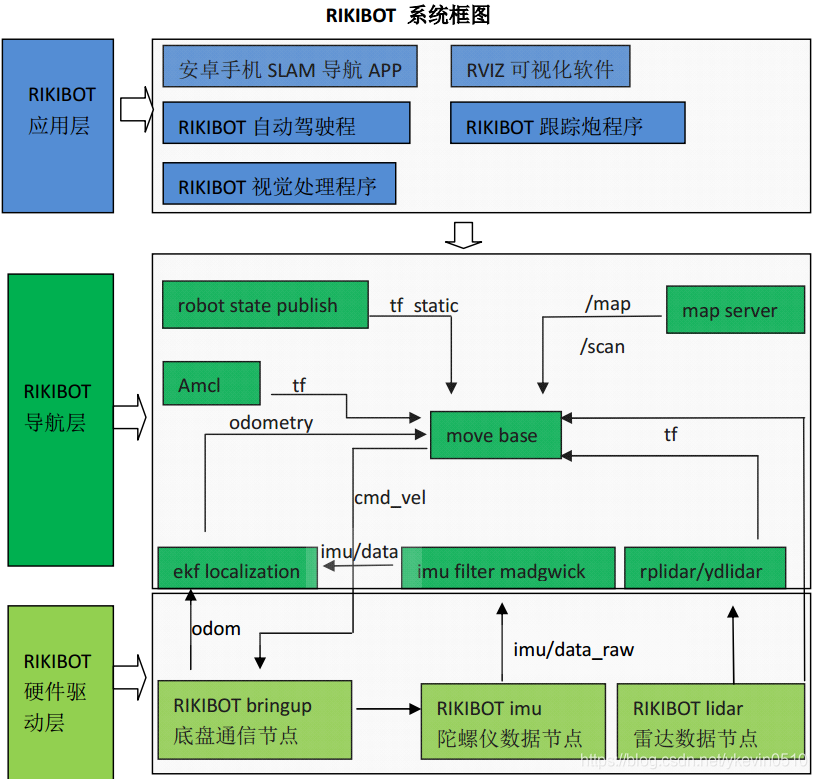
ROS机器人硬件 采用树莓派和STM32驱动板组成双系统通信框架,具体组成参考下图:

1.2主控制器
ROS控制器采用树莓派4B或者Jetson Nano,运行运行Ubuntu Mate18.04或Ubuntu18.04系统,具体型号有差异。系统安装有ROS机器人操作系统, ROS版本为Melodic版本,作为机器人端ROS节点控制器。
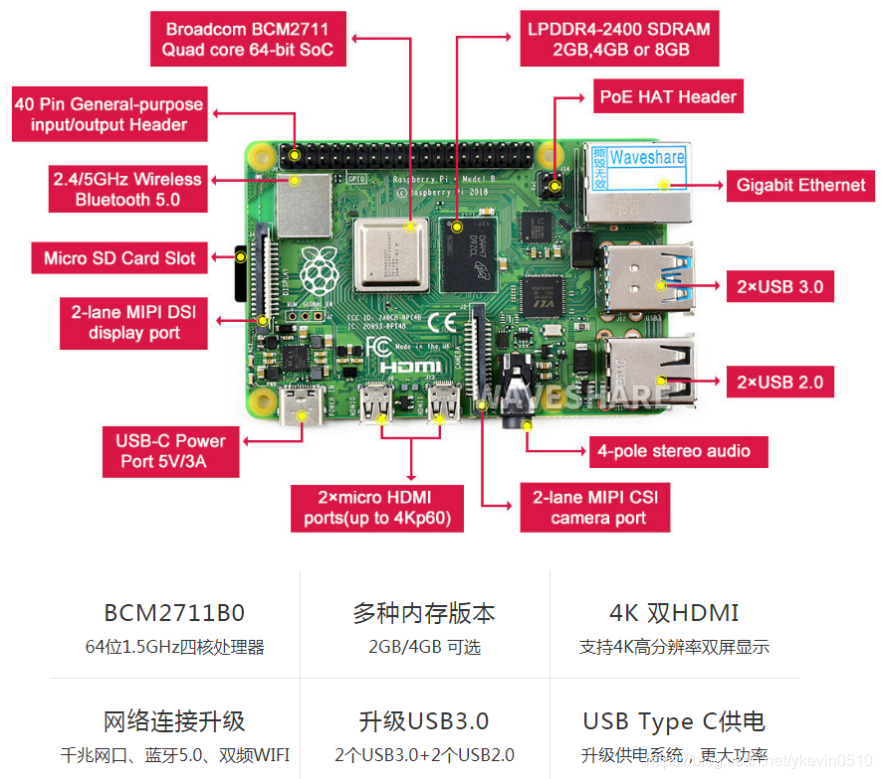
树莓派4B对比3B+升级明显,主要功能包括高性能Cortex-A72 64位四核处理器, 2路micro-HDMI端口支持分辨率高达4K的双显示屏,高达4Kp60的硬件视频解码,高达4GB的RAM,双频2.4/5.0 GHz无线局域网,蓝牙5.0,干兆以太网, USB 3.0和POE功能(通过单独的POE HAT插件) 。

1.3底层驱动板
底层驱动板为锐趣科技自主研发的机器人驱动板,跟上层主控采用ROSSERIAL协议通信,整体通信协议基于标准ROSSERIAL协议,调用库函数API,用户可通过自定义消息来实现数据通信。驱动板MCU 采用STM32F103RCT6芯片,板载MPU6050 IMU角速度陀螺仪传感器,支持4路直流电机闭环驱动控制,一路超声波传感器控制,两路舵机驱动控制,一路温湿度传感器控制,一路蓝牙控制,PS2手柄控制,SWD固件程序烧录口,还引出芯片富余IO口可供用户二次开发使用。

1.4 主控
1.4.1 树莓派4B
采用2G或者4G内存,SD卡采用16G以上的class10高速卡,运行ubuntu mate 18.04系统,系统运行更流畅,用户体验更好。

1.4.2 Jetson Nano
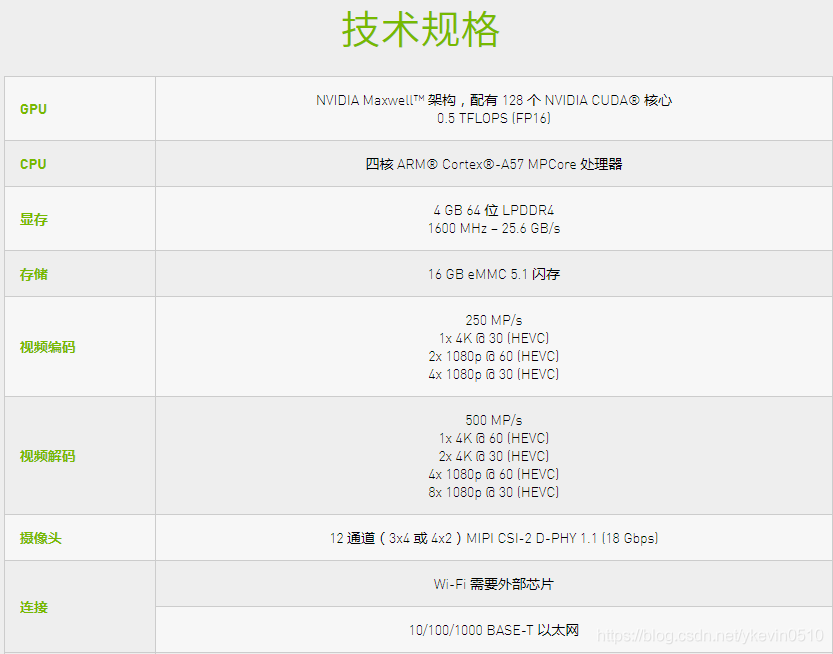
NVIDIA® Jetson Nano™ 开发者套件是一种功能强大的小型计算机,您可借助其并行运行多个神经网络,从而实现图像分类、目标检测、分割和语音处理等应用。该平台易于使用,可完成所有工作,且运行功率仅为 5 瓦。
Jetson Nano 模组仅有 70 x 45 毫米,是体积非常小巧的 Jetson 设备。 为多个行业(从智慧城市到机器人)的边缘设备部署 AI 时,此生产就绪型模组系统 (SOM) 可以提供强大支持。

1.5 激光雷达
思岚A1雷达,部分ROS机器人搭载思岚A1激光雷达,可实现12M测距范围, 8000次/秒测量频率,适合室内SLAM建图导航,具体参数详见思岚激光雷达官网链接:http://www.slamtec.com/cn/Support#rplidar-a-series
另外版本的车型还能支持思岚其他系列的雷达,例如A2,A3,S1等。
1.6 深度摄像头
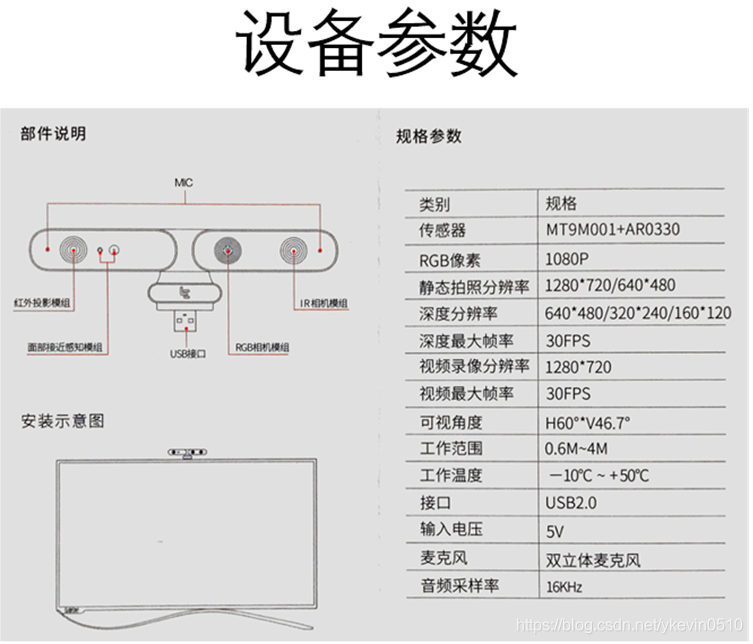
乐视体感摄像头,RGBD深度相机,包含普通摄像头的功能和能获取深度数据,二合一这对于ROS开发来说非常友好。另外摄像模组和奥比中光Astra模组驱动兼容,ROS开发资料完全可以利用奥比中光Astra ROS驱动包。
1.7 麦克风阵列

1.8 其他硬件设备
超声波模块、8400mA锂电池、直流有刷电机,橡胶轮,麦克纳姆轮,车板,排线等。
最后
Rikirobot提供两驱动、四驱动、麦克纳姆轮、Omni全向三轮、Omni全向四轮、履带、阿克曼(舵机转向)、大型负载的各种ROS车,有配套指导、及完善售后。
ROS机器人硬件介绍
1.1硬件框架
ROS机器人硬件 采用树莓派和STM32驱动板组成双系统通信框架,具体组成参考下图:
1.2主控制器
ROS控制器采用树莓派4B或者Jetson Nano,运行运行Ubuntu Mate18.04或Ubuntu18.04系统,具体型号有差异。系统安装有ROS机器人操作系统, ROS版本为Melodic版本,作为机器人端ROS节点控制器。
树莓派4B对比3B+升级明显,主要功能包括高性能Cortex-A72 64位四核处理器, 2路micro-HDMI端口支持分辨率高达4K的双显示屏,高达4Kp60的硬件视频解码,高达4GB的RAM,双频2.4/5.0 GHz无线局域网,蓝牙5.0,干兆以太网, USB 3.0和POE功能(通过单独的POE HAT插件) 。
1.3底层驱动板
底层驱动板为锐趣科技自主研发的机器人驱动板,跟上层主控采用ROSSERIAL协议通信,整体通信协议基于标准ROSSERIAL协议,调用库函数API,用户可通过自定义消息来实现数据通信。驱动板MCU 采用STM32F103RCT6芯片,板载MPU6050 IMU角速度陀螺仪传感器,支持4路直流电机闭环驱动控制,一路超声波传感器控制,两路舵机驱动控制,一路温湿度传感器控制,一路蓝牙控制,PS2手柄控制,SWD固件程序烧录口,还引出芯片富余IO口可供用户二次开发使用。
1.4 主控
1.4.1 树莓派4B
采用2G或者4G内存,SD卡采用16G以上的class10高速卡,运行ubuntu mate 18.04系统,系统运行更流畅,用户体验更好。
1.4.2 Jetson Nano
NVIDIA® Jetson Nano™ 开发者套件是一种功能强大的小型计算机,您可借助其并行运行多个神经网络,从而实现图像分类、目标检测、分割和语音处理等应用。该平台易于使用,可完成所有工作,且运行功率仅为 5 瓦。
Jetson Nano 模组仅有 70 x 45 毫米,是体积非常小巧的 Jetson 设备。 为多个行业(从智慧城市到机器人)的边缘设备部署 AI 时,此生产就绪型模组系统 (SOM) 可以提供强大支持。
1.5 激光雷达
思岚A1雷达,部分ROS机器人搭载思岚A1激光雷达,可实现12M测距范围, 8000次/秒测量频率,适合室内SLAM建图导航,具体参数详见思岚激光雷达官网链接:http://www.slamtec.com/cn/Support#rplidar-a-series
另外版本的车型还能支持思岚其他系列的雷达,例如A2,A3,S1等。
1.6 深度摄像头
乐视体感摄像头,RGBD深度相机,包含普通摄像头的功能和能获取深度数据,二合一这对于ROS开发来说非常友好。另外摄像模组和奥比中光Astra模组驱动兼容,ROS开发资料完全可以利用奥比中光Astra ROS驱动包。
1.7 麦克风阵列
1.8 其他硬件设备
超声波模块、8400mA锂电池、直流有刷电机,橡胶轮,麦克纳姆轮,车板,排线等。
最后
Rikirobot提供两驱动、四驱动、麦克纳姆轮、Omni全向三轮、Omni全向四轮、履带、阿克曼(舵机转向)、大型负载的各种ROS车,有配套指导、及完善售后。

 举报
举报













 举报
举报



