



卞轮辉
分享资料个
本文将致力于开发具有“视觉”的 4WD 机器人,该机器人使用普通且廉价的相机 ОV7670,它将通过蓝牙将图像从相机(实时)传输到智能手机。该机器人还将通过智能手机的蓝牙进行控制。
本文不会详细介绍 Arduino UNO 的编程过程(只贴一个草图)。编程过程在另一篇文章中有详细描述。
在各种网上商店订购:
其他一切(库存):
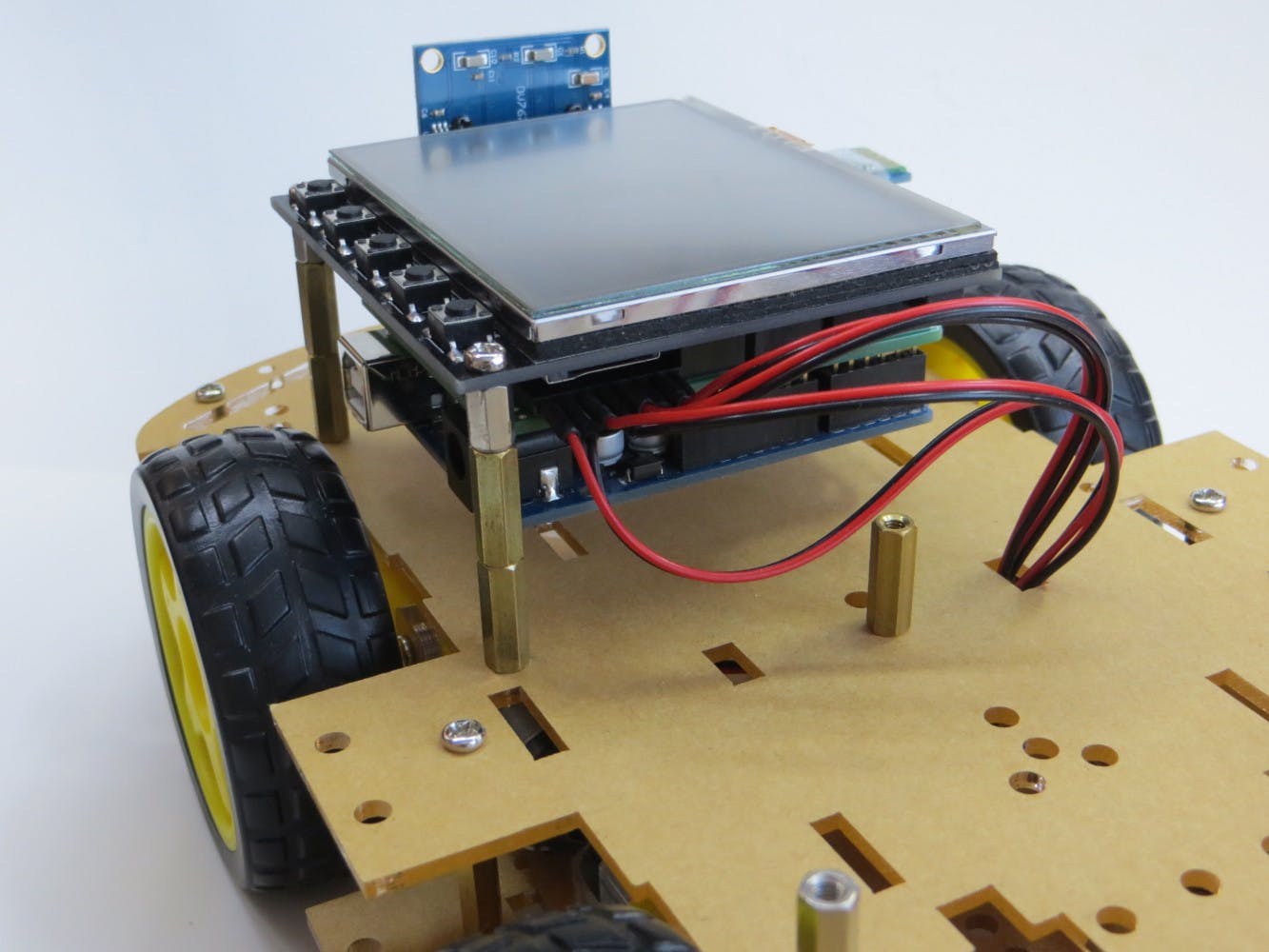
您需要做的第一件事是构建一个 4WD 机器人平台。以下是尽可能详细的组装过程。
由于Arduino UNO板上的空闲引脚不多(大部分引脚用于TFT屏幕),考虑到可用引脚,决定焊接L293D驱动控制电路。此布局安装在 Arduino UNO 板和 TFT 屏幕之间。方案如下:
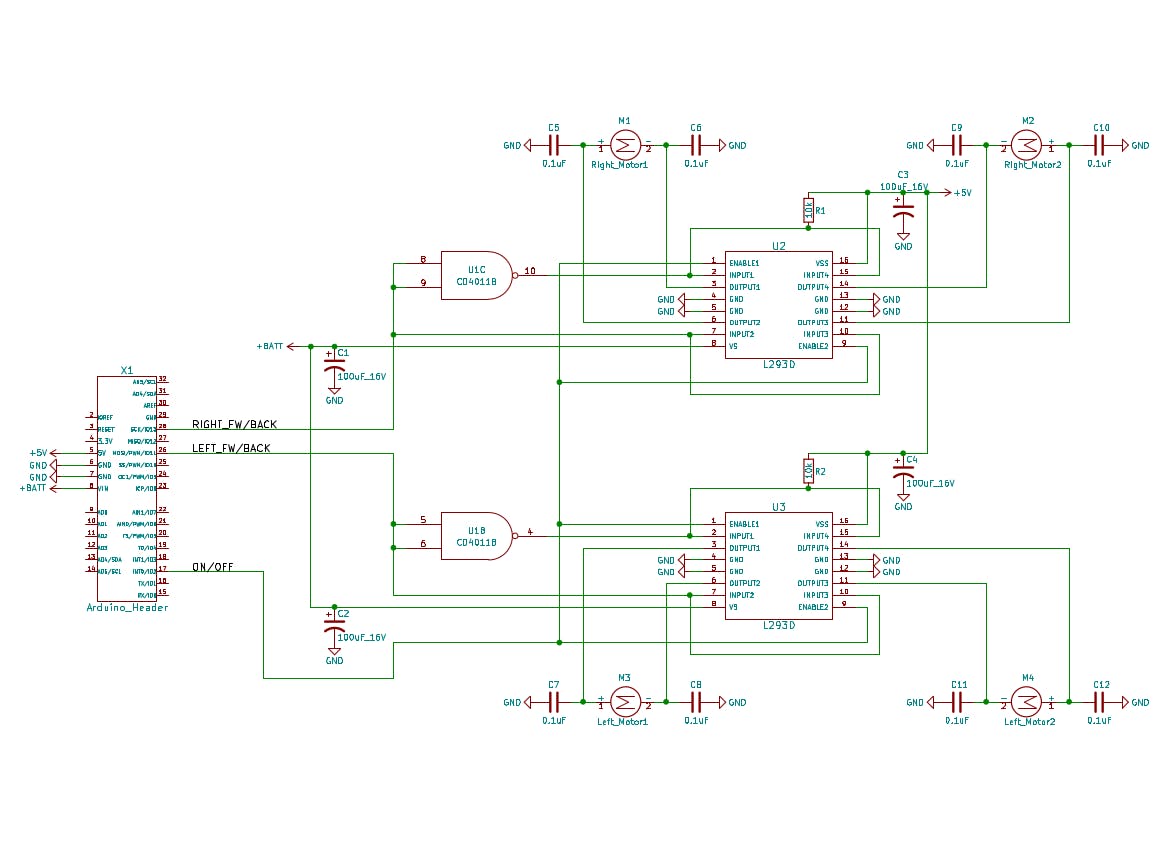
Arduino UNO shield TFT_shield_Robot.ino (+ ov7670_regs.h ) 中的程序。该过程在文章中有详细描述。
将 OV7670 摄像头和蓝牙模块 HC-05 连接到 TFT 屏蔽层。将 TFT shield、电机驱动器的面包板、Arduino UNO 连接在一起。在机箱上安装组件“TFT shield / Motor driver / Arduino UNO”,7.2 V 电池。将 4 个电机的电线连接到驱动板(我实验性地每个连接一个电机:-))。
使用 4WD Robot,您需要在手机上安装MyRobot.apk应用程序,打开蓝牙,启动应用程序,选择蓝牙检测到的模块标识符。如果所有动作都成功执行,4WD 机器人的图像和屏幕底部的控制按钮应出现在手机屏幕上。请注意,手机必须直立。通过单击按钮,您可以制作 4WD 机器人:
对于视觉演示,我附上了使用 4WD 机器人的视频。如果您喜欢(或不喜欢)我的项目,请评估我的工作。感谢您的关注!
添加 2020 年 5 月 22 日:链接到 Apk 源代码(重命名为 MyRobot_01.zip 并解压缩)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉




全部0条评论

快来发表一下你的评论吧 !
