



杨丽
分享资料个
在 COVID-19 大流行下,全世界都强烈需要加速将机器人引入消毒任务。然而,现有的机器人存在很多问题,尤其是价格昂贵且难以量产。这个事实是致命的:前者是成本问题,阻碍了消费者购买机器人;后者是一个大规模生产的问题,阻止了供应商决定开发和销售机器人。这两个问题肯定会耽误市场发展,消毒机器人在社会上的部署也会被推迟。
我们开发了一款名为“ Amabie ”的消毒机器人,它的名字来源于一种日本精神,它可制造且价格合理,可以解决这些问题。Amabie 自动使用紫外线灯对房间进行消毒。它的设计主要集中在三点:第一点是“可制造”,第二点是“实惠”,最后是“可扩展”。
第一点,“可制造”是指易于批量生产。Amabie的硬件可以分为一些模块,几乎所有的模块都是由可靠的供应商出售的现成零件组成的。这样的设计使建造和维修变得简单。此外,我们不必生产复杂的部件(例如电机单元)。与传统机器人相比,不再需要建造 Amabie。第二点“负担得起”意味着我们可以以低成本构建 Amabie,同时它具有足以在任何机构中使用的消毒能力。认真审视批量生产,我们意识到降低制造成本,包括零部件采购和组装。最后一点“可扩展”意味着用户可以轻松地为自己的环境定制 Amabie。例如,我们准备了三种类型的 Amabie:Type-1 是基本款,Type-2 有更多的紫外线灯和更大的电池,可以工作更长时间,Type-3 有一个机械臂。由于它们都基于相同的框架,因此三种类型的 Amabie 可以构建在相同的生产过程上。
在下文中,我们将描述构建基本模型 Amabie Type-1 的技术。我们的提议不仅包括机器人,还包括机器人系统,即安全使用 Amabie 的环境辅助模块。我们工作的主要贡献是集成。尽管每种基本技术都不是新的,但我们结合当前技术是最有效的消毒任务。
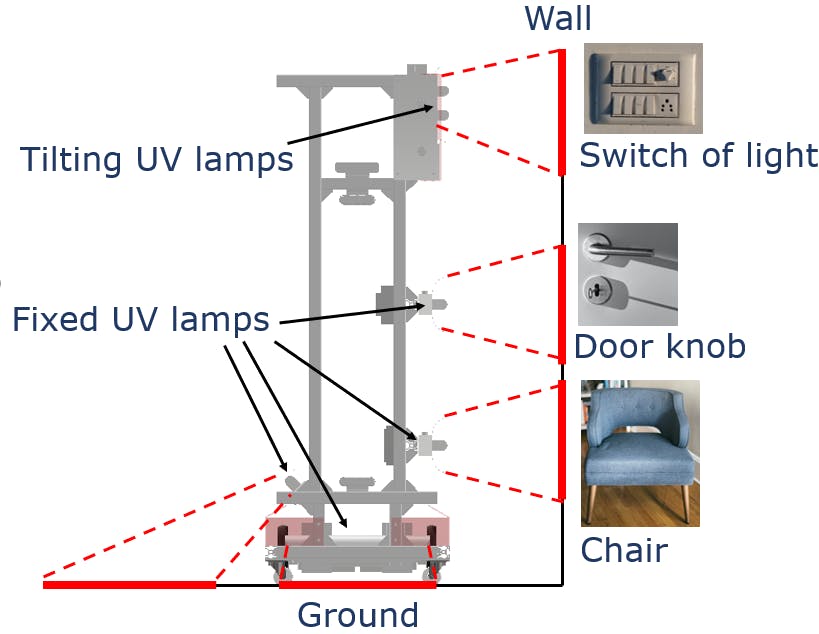
机器:两个驱动轮驱动 Amabie,四个脚轮支撑它。即使 Amabie 在不光滑的地板上行驶,悬挂装置也能使车轮保持稳定。它有六个紫外线灯:四个固定在主框架上,另一个(两个灯)倾斜,以便不仅面向墙壁,而且面向床、椅子和桌子的顶部。
电路:Amabie 配备了铅酸电池。为了安全紧急停止,断路器经过精心设计,不会损坏 Amabie 的任何组件。为了最大限度地提高主计算机的性能,微控制器与执行器和模拟接口进行通信。
软件:所有软件均在机器人操作系统(ROS)上实现,这是一个全球使用的机器人平台。许多在 ROS 上运行的资源已发布,它们可以根据需要扩展 Amabie。四个摄像头模块使 Amabie 能够创建地图、自我定位以及检测物体和人类。
安全系统:虽然没有人可以消除 Amabie 的盲点,但我们创建了一种新颖的系统来检测人员以确保安全操作。我们开发了一种易于安装在门上的信标。信标具有无线通信模块和超声波传感器,因此它可以检测到有人进入房间,然后信标将其发送给 Amabie。
介绍
这些天来,COVID-19 在全世界流行。由于许多感染者和患有基础疾病的患者聚集在医院,因此每天都在进行病毒清除活动。当然,即使在 COVID-19 全球大流行之前,这些活动每天都在进行。然而,大多数医院的员工一直在使用含酒精的消毒喷雾剂或布进行消毒 [1]。然后,为了减少人为错误和劳动力成本,开发了紫外线机器人。例如,UVD Robots ApS 开发了 UVD 机器人 [2],General Disinfection Service 开发了“Light Strike”[3]。这些机器人可以消灭99.99%的病毒,所以一些医院使用这些机器人。
但是这些医院规模大,比如大学医院,小医院,比如个体医院,很少引进这些机器人。主要原因是价格高。这些机器人大约是150,000美元。比较机器人的引进成本和人工成本,医院只能判断引进它不是工作。此外,考虑到电池寿命和其他性能,我们不能否认性能过高。没有遭受医疗中断的医院将推迟引入它。然而,医疗行业正在日新月异。所以,如果他们需要紫外线机器人,我们现在就需要他们。因此,我们开发了满足负担能力并且可以立即引入现场的紫外线机器人“Amabie”。名字“阿玛比”“来自日本精神。据说在日本,Amabie 预知流行病并避开人们。我们通过使其具有最低要求的功能和高扩展性,让用户可以选择适合自己情况的 UV 机器人。这文章主要介绍最基本的类型。
概念
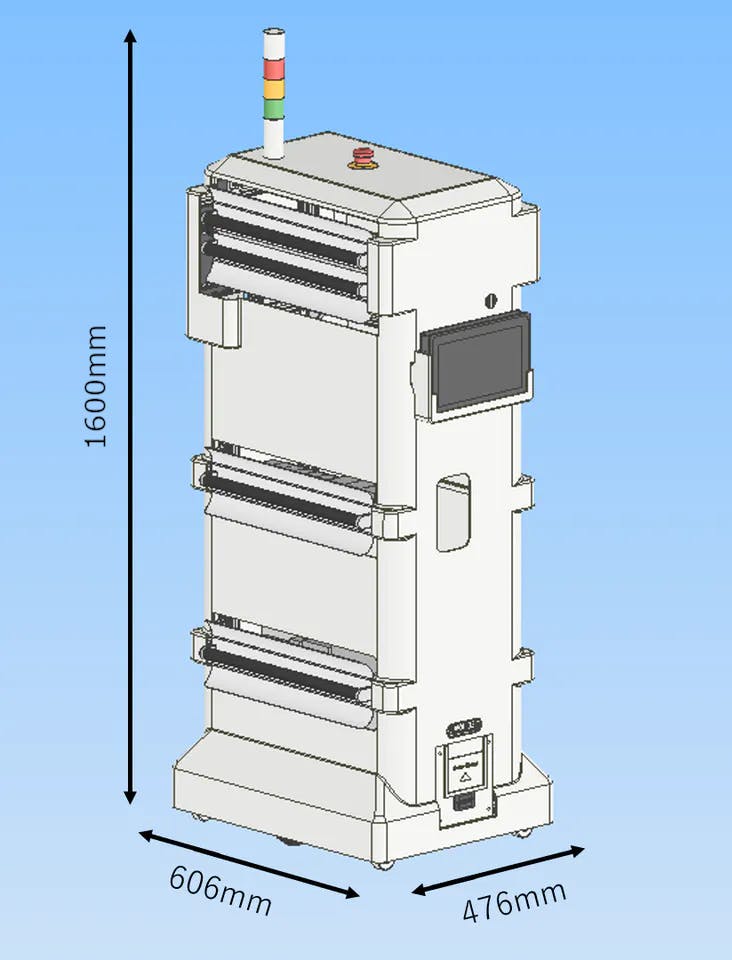
这就是我们的紫外线机器人“ Amabie ”。我们基于以下 3 个概念开发了 Amabie。
(1)可扩展
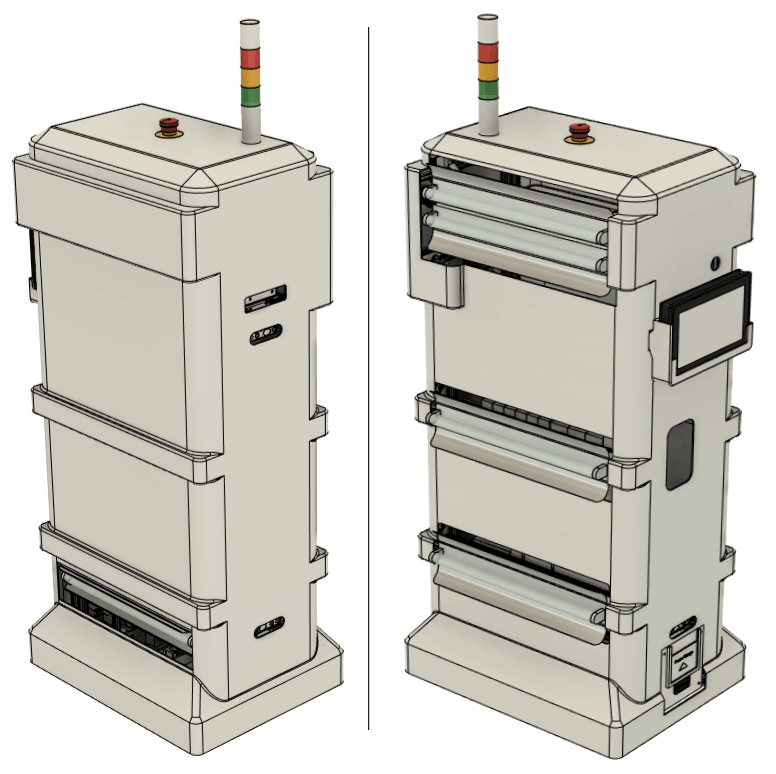
各种机构都需要UV机器人。因此,我们开发了以下 3 种类型以满足各种需求。它就是其中的一个例子。Amabie 可以根据您的情况进行定制。
(2)经济实惠
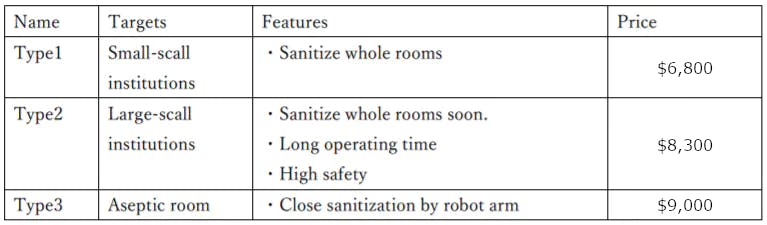
如表 1 所示,Amabie 价格低廉。现有的紫外线机器人几乎是 150,000 美元。Amabie 不到现有紫外线机器人的十分之一。
(3)可制造
Amabie 很容易生产。您可以在 1 周内获得 Amabie。因此,当您想要一个紫外线机器人时,例如流行病,您可以比其他紫外线机器人更快地获得紫外线机器人“Amabie”。大约 80% 的 Amabie 零件由现成产品制成。所以,Amabie 很容易制作。
消毒性能
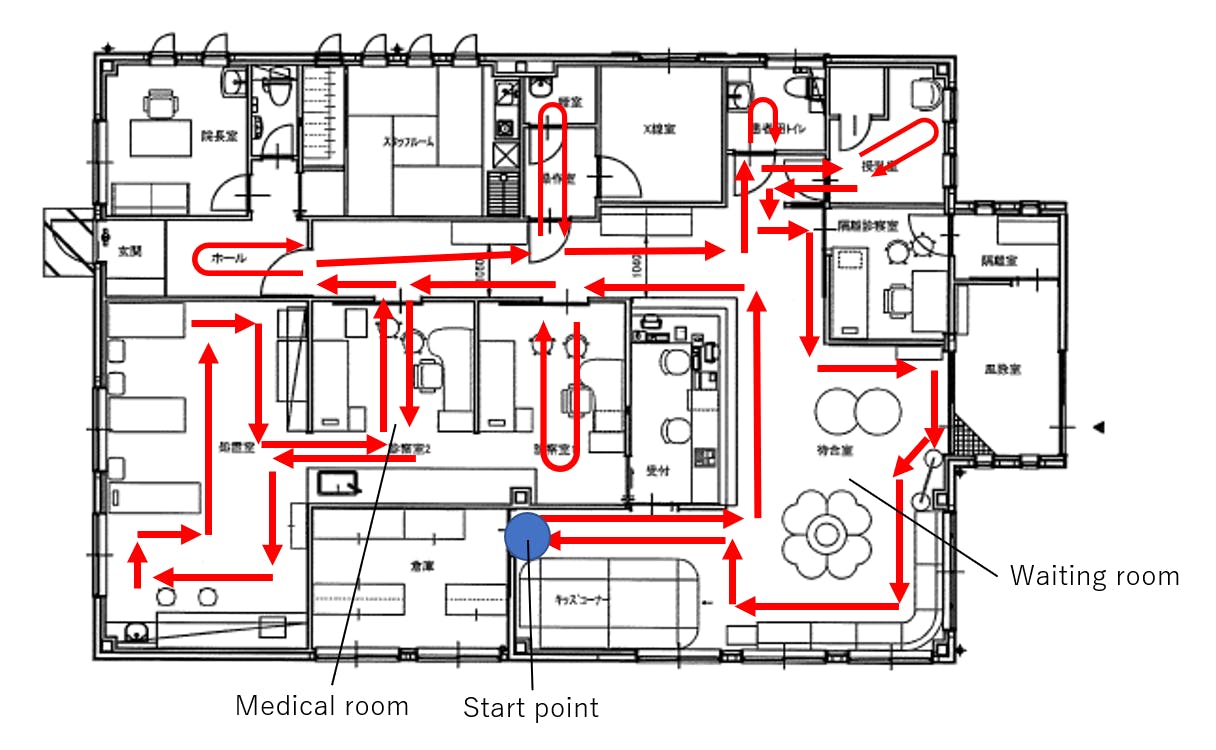
这是 Type1 的消毒区域。如图所示,Amabie 的消毒范围很大。
现有的紫外线机器人对空间进行消毒。但是,需要对医院的表面进行消毒,等等[1]。因此,Amabie 接近目标进行正确消毒。
这种性能足以正确消毒几乎所有区域。
如何使用阿玛比
使用 Amabie 非常简单。流量是;
(1) 您沿左侧墙设置路线。
(2) 你按下启动按钮。
(3) Amabie 对房间进行消毒。
(4) Amabie 回到起点。
(5) Amabie 通知您。
一个示例课程就是这样。
如何保养紫外线灯
当照明时间达到 6000 小时或灯泡发生故障时,应更换新的紫外线灯管。当 Amabie 的开关关闭时,用户可以通过将灯旋转 90 度来更换紫外线灯。当灯“亮”的次数达到指定次数时,应更换新的启动器。当您移除 Amabie 的外壳时,用户可以轻松更换增长启动器,因为它是拧紧的。用户可以查看点灯时间和灯“亮”的数量,但会在触摸屏上显示自动提醒。
紫外线杀菌照射的目的
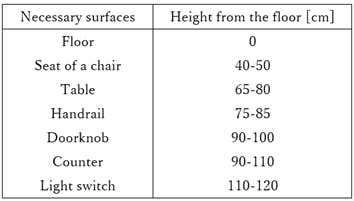
UV-C 光(波长为 200-280 nm)已被用于杀死或灭活细菌或病毒。由于 COVID-19 (SARS-CoV-2) 现在正在全球范围内传播,紫外线杀菌辐射引起了越来越多的关注。根据最新的期刊文章,UV-C(254 nm)照射在灭活和抑制 SARS-CoV-2 复制方面非常有效 [6]。Amabie 的目标不是对整个房间空间进行消毒,而是对必要的表面和地板进行有效的消毒。包括地板的原因是,当空气中的飞沫落在地板上干燥时,病毒会在空气中飙升[7]。
紫外灯规格
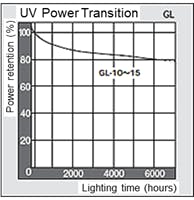
Amabie 有两种类型的紫外线灯,由日本制造商松下制造。一种是GL 10,10W灯功率。另一种是GL15,15W灯功率。其他使用更高功率灯的 UV 机器人,例如 UVD 机器人使用 180W 的 UV 灯 [8]。我们认为 Amabie 有足够的紫外线能量,因为她可以接近目标。这两种灯都非常容易获得,并且成本低于每单位 20 美元。此外,额定寿命,即保持80%输出的时间为六千小时。一些紫外线灯的功率转换尚不清楚,但 Amabie 灯的功率转换已为人所知。因此,我们在计算中使用 80% 的紫外线辐照度,因为应该考虑紫外线灯的退化。

紫外灯布局
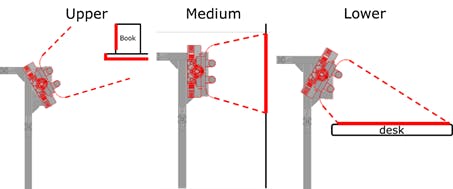
在 Type1 中,Amabie 有六个 UV 灯,其中两个用于地板,四个用于墙壁或侧面物体。在 Type2 和 Type1 的扩展版 Type2 和 3 中,Amabie 有 11 个 UV 灯,其中 3 个用于地板,8 个用于墙壁或侧面物体。紫外灯对称布局和Type2和3的高度。
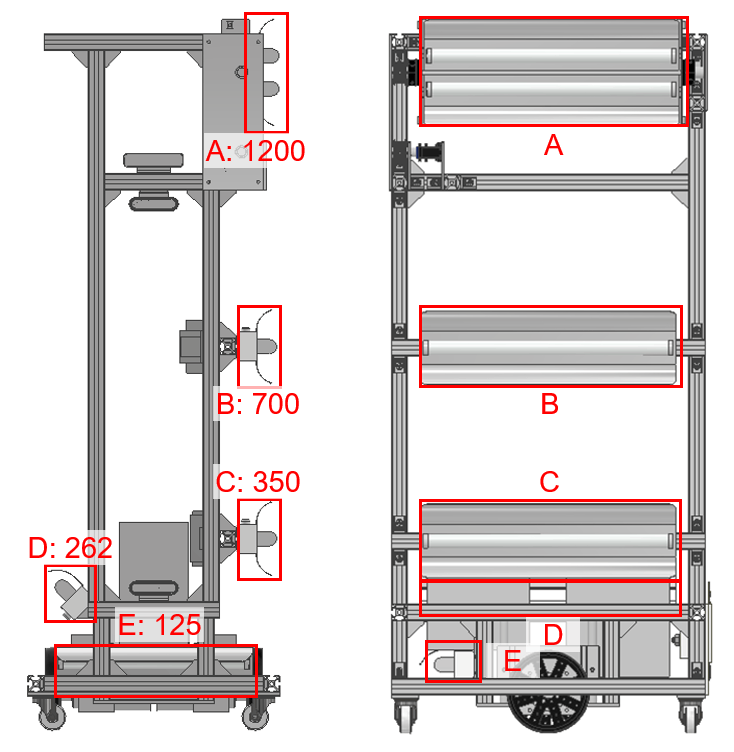
灯 A (A') 有两个 UV 灯,因为它是由伺服电机倾斜的,所以它可以照射很广的区域。所有的灯都有一个铝反射器,所以它们的光线会集中在前面的中心。我们认为灯 A 可以通过倾斜有效地照射低处和高处。这是Amabie的一个关键点。灯 D (D') 和 E 用于地板消毒。灯E只有10W输出(GL10),其他都是15W(GL15)。
UV-C 剂量计算
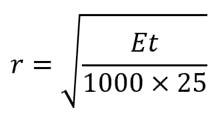
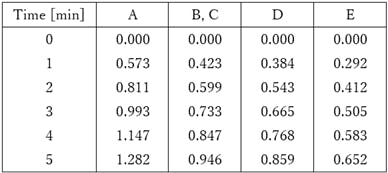
我们将5 分钟内 25 mJ/cm2 或更多剂量定义为消毒条件,并计算每个紫外线灯的消毒距离和面积。将 E [µW/cm2] 定义为 1m 处的紫外线辐照度,将 t [s] 定义为曝光时间。γ [mJ/cm2] 作为来自紫外灯的 r [m] 位置处的辐照能量密度,已经表达了这个方程。
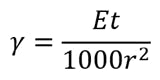
通过求解 r,可以得出 γ=25 mJ/cm2 或更大的剂量距离。
为简化起见,将灯 A(2 个)视为具有两倍辐照度的单个灯。如前所述,由于退化,我们在计算中使用了 80% 的紫外线辐照度。因此,GL10 在 1m 处的辐照度为 23.2 µW/cm2,GL15 为 40.8 µW/cm2。

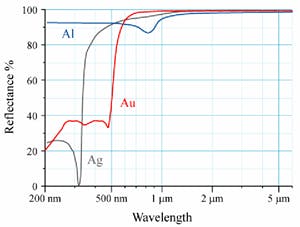
我们应该考虑反射器的影响,通过使用灯具的 CAD 数据来计算 Amabie 的正确消毒区域,因为所有灯都有一个铝反射器。由于 GL10 和 GL15 的波长为 253.7 nm,因此我们在此计算中使用92%作为铝反射器的反射率。
Amabie 有五盏灯,但灯 B 和灯 C 是一样的。因此,我们分析了反射器的四种图案效果。为简化起见,我们只考虑直行或仅反射一次的光线。
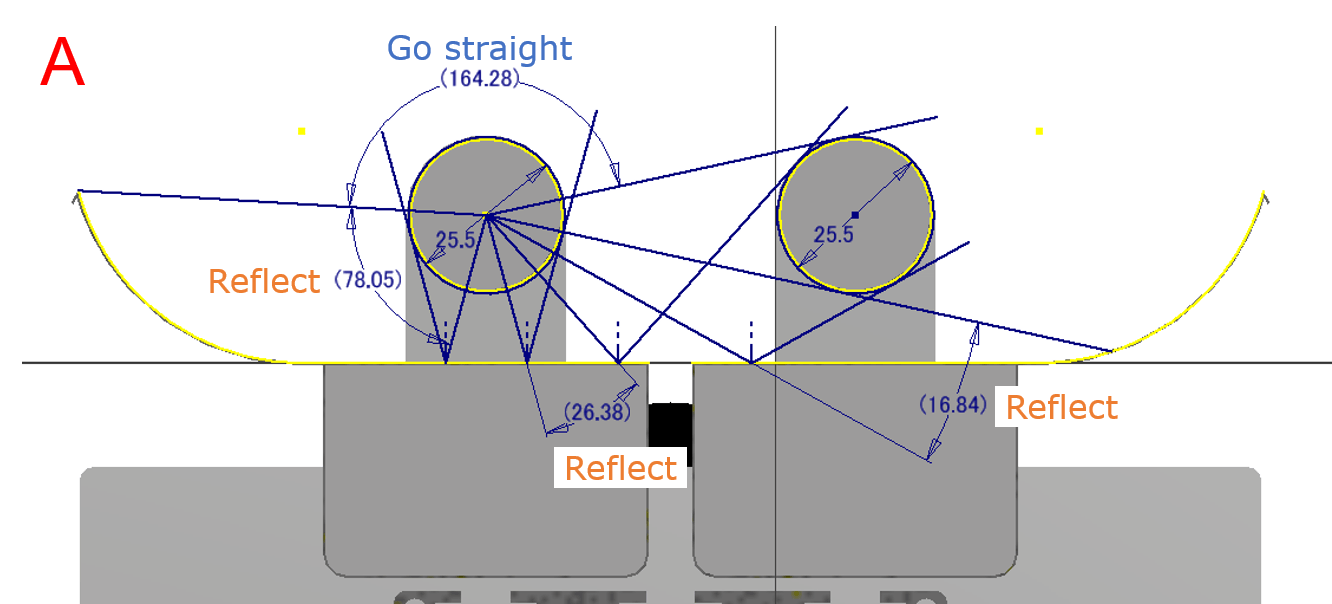
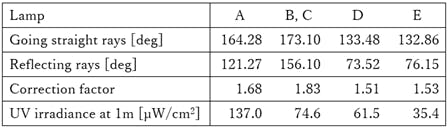
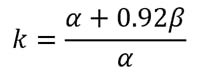
校正因子 k 表示反射器提高了多少辐照度,当 α 是直射光线而 β 是反射光线时,可以推导出这个方程。实际上,反射器的效果具有角度色散。但是,我们在此计算中使用校正因子进行简化。
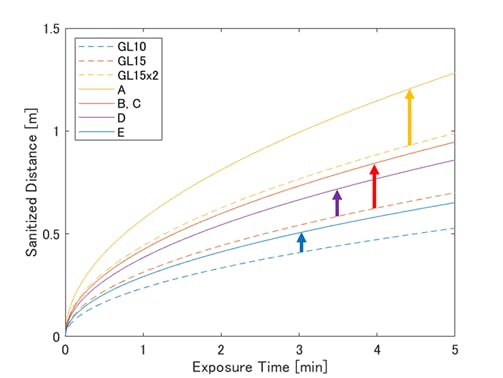
虚线是普通的紫外线灯,实线包括反射器的效果。结果,通过使用反射器改善了 Amabie 的消毒区域。
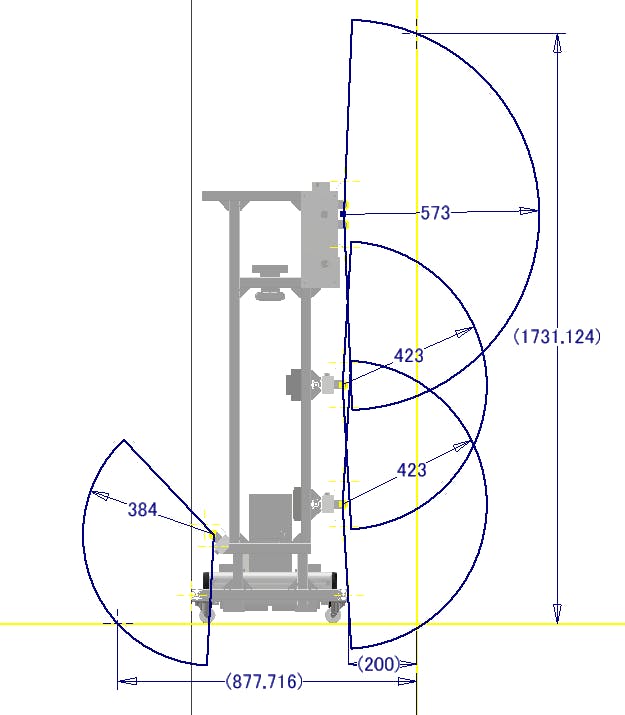
这些数字显示了1 分钟内的消毒区域。地板的宽度约为900 毫米。如果 Amabie 到墙壁的距离为 200 毫米,则紫外线灯管覆盖1700 毫米高度。2、3型消毒区域对称分布。关于UV光的轴向,消毒区域的宽度与灯的长度相同。
阈值 (TLV) 计算
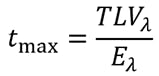
由于紫外灯的波长为 253.7 nm,阈值限值 TLV_λ 等于 6 mJ/cm2。 [11] 因此,当 E_λ [mW/cm2] 是未过滤的辐照度 [11] 时,1m t_max [s] 处的最大曝光时间由该方程得出。t_max 的最小值为 43.8 秒。Amabie 的紫外线灯比其他紫外线机器人等高功率紫外线灯更安全。

上部设计
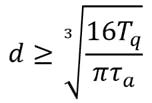
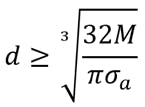
我们使用 30mm 方形铝制框架作为 Amabie 的结构,因为它重量轻且易于使用。灯A转轴的材质采用碳钢S45C(JIS)。灯 A 由伺服电机 RS405CB (Futaba, 48kgf・cm) 通过同步带倾斜。因为灯A的旋转轴穿过重心,所以它可以以最小的扭矩旋转。T_q=480x9.8=4704 [N・mm] 是扭矩,τ_a=94 [MPa] 是许用扭转应力,M=3863 [N・mm] 是弯矩时,旋转轴的直径 d 由这些公式确定, σ_a=117 [MPa] 为许用弯曲应力。因此,直径应大于 7mm,我们决定直径等于 20mm 具有较高的安全余量。
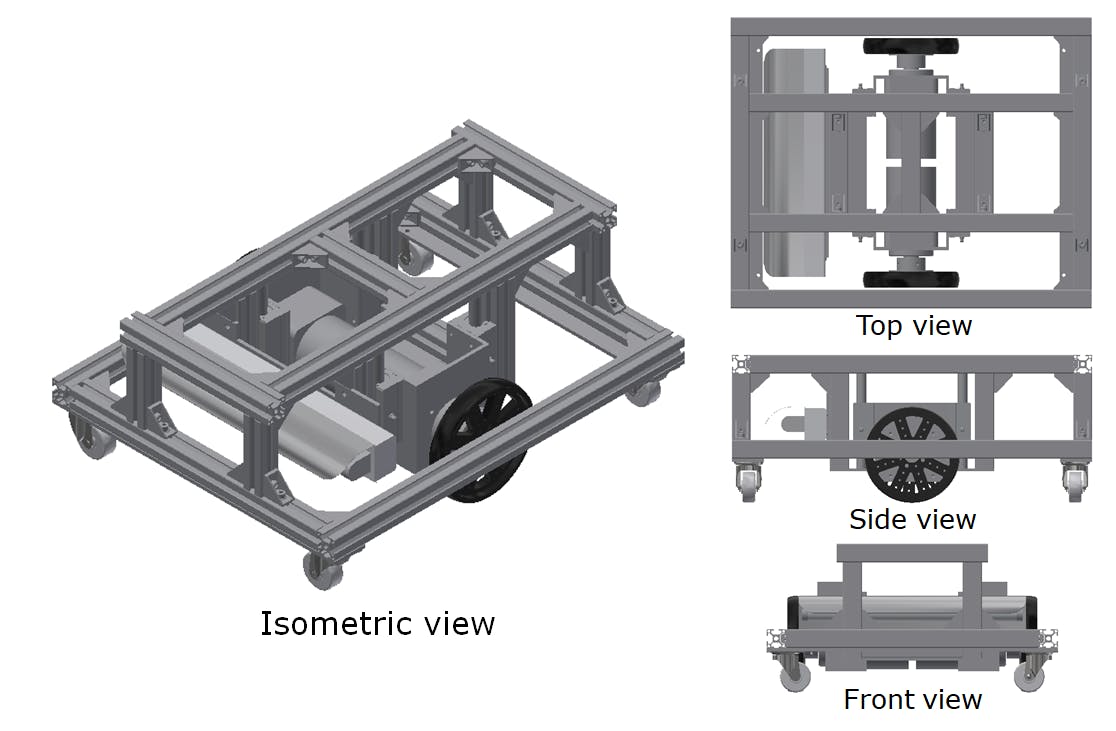
起落架是移动的一部分。尺寸为 W460×D570(mm)。它有 2 个驱动轮和 4 个脚轮。通过减少电机的数量,我们可以降低成本。起落架内的紫外线灯对地板进行消毒。当紫外线灯熄灭后,用户可以通过取下盖子来更换它。驱动轮具有悬架,因此用户不介意在空中旋转。为了爬过台阶,例如电缆,轮子和脚轮的直径很大。
驱动轮
驱动轮是移动机器人的部件。主要部件是电机、悬架和车轮。然后,我描述了我选择的产品。
电机为 MABUCHI MOTOR 制造的 MS-94BZB。悬架是 Accurate 制造的 P513。滑动衬套为 NIPPON BEARING 制造的 SME16GWUU。车轮是由 Actobotics 制造的 6 英寸重型模型。其他固定部件由 MISUMI 制造。
我们设计的起落架总重量假定为 100 公斤。它有 6 个接地点,因此驱动轮上加载的力为 166N,以免撞到地板。那么,悬架的强制力一定超过了 166N。悬架“P513”的允许载荷为103.2。它使用两个悬架标准一驱动轮。
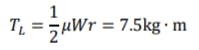
由于要爬过台阶,轮子的直径是 6”。那么,启动函数负载转矩“ T_L ”为;
我们决定最大速度与人类步行速度相同,1m/s,加速周期为2s。采用梯形加速度,加速力矩为;
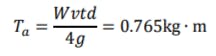
因此,电机需要超过 8.2 kg·m 的扭矩。MS-94BZB 的重量为 86 kg・m。因此,它符合要求。此外,我们优先考虑易于组装。我们不想使用 Gearbox。那么,该电机输出轴的径向负载能力为 70 kgf。它符合要求。
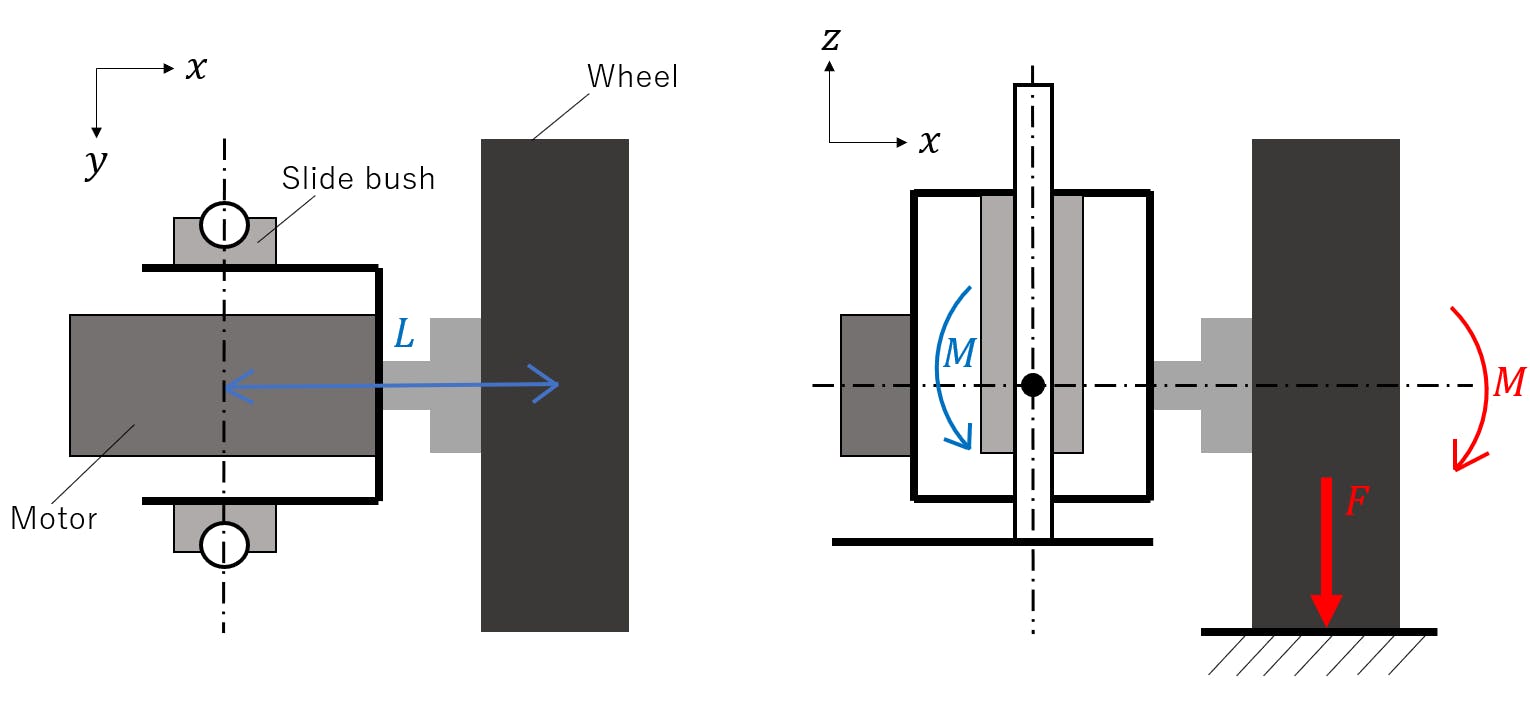
接下来,我们考虑了从地面加载的力产生的力矩。从地面受到的力与悬挂的力“206N”相同。由力“ F ”产生的力矩“ M ”加载在两个滑动衬套上。因此,加载在一个滑动衬套上的力矩为 1/2 * M 。长度“ L ”为119.86mm。所以,1/2 * M是;
SME16GWUU 的允许静力矩为 12600 N·mm。因此,它符合要求。
脚轮
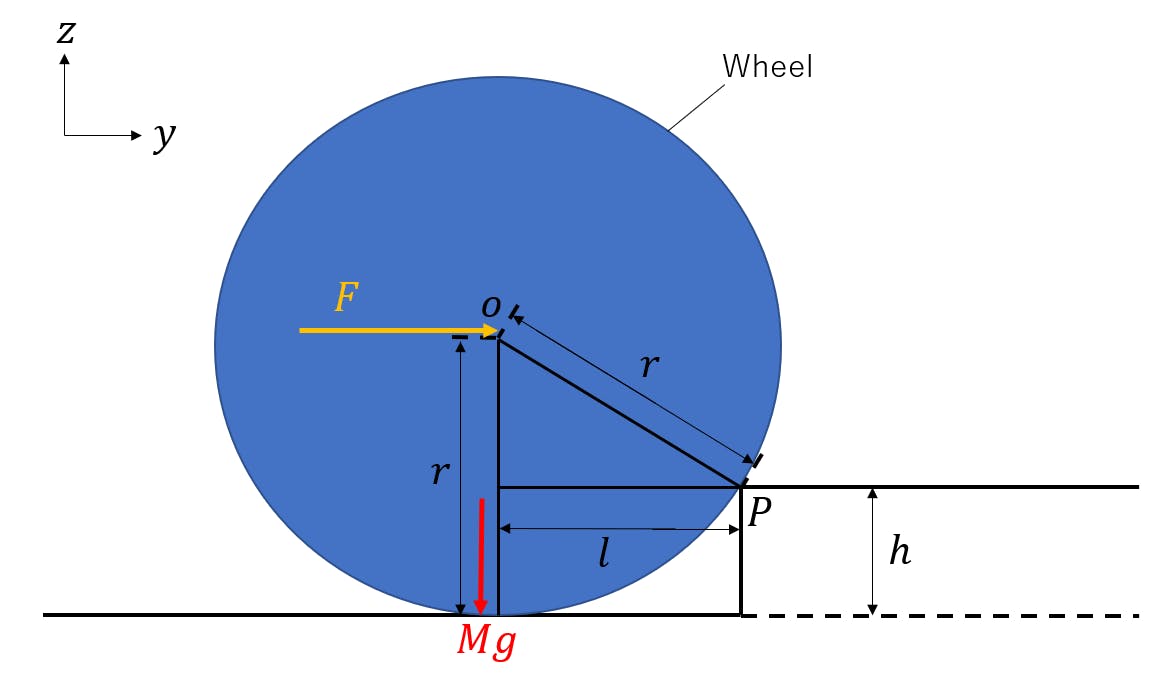
脚轮是TAKIGEN MFG.CO的K-420G-50N。由于允许载荷为372N,因此满足要求。现在,我们要爬超过 100 毫米的台阶。爬过台阶所需的时间是M_P 。推动机器人产生的力矩“ F ”为M_F 。负载为 166N。所以,M_P是;

那么,M_F是;
根据这个公式,amabie 可以通过推动 217N 的力爬上 10mm 的台阶。
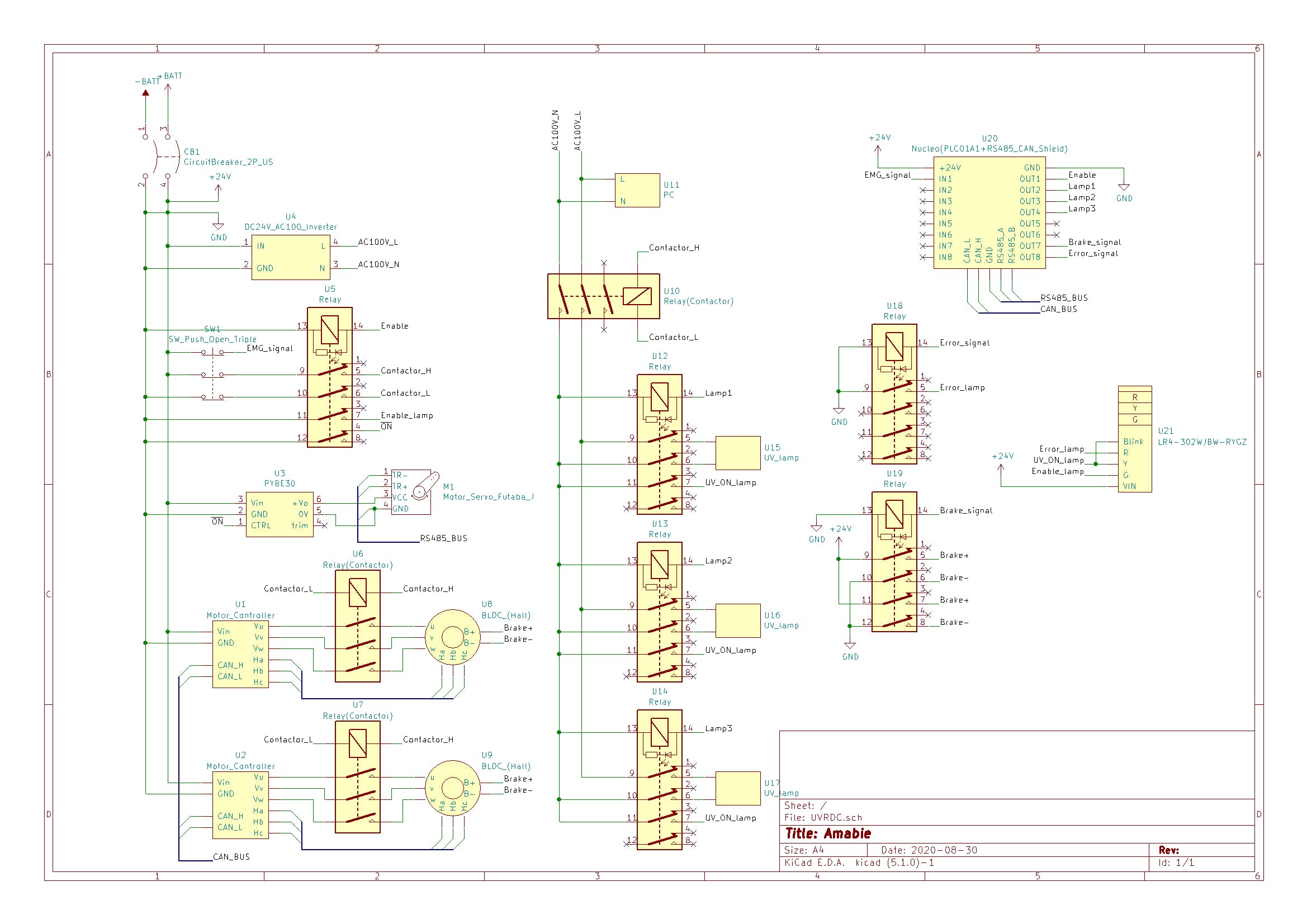
电源
Amabie 有两条电源线,一条 DC 24V 电源线和一条 AC 100V 电源线。DC 24V 电源由机器人内置的铅酸电池提供,AC 100V 电源由机器人内部的 DC/AC 逆变器产生。DC 24V电源线驱动轮子电机、顶部UV灯的倾斜电机、MCU板和塔指示灯,AC 100V电源线驱动UV灯和主机。在紧急情况下,可以通过接触器切断提供给电机和紫外线灯的电流。
控制信号
Amabie 有两个控制设备,一个主计算机和一个定制的微控制单元 (MCU) 板。计算机处理高级控制,例如 SLAM 和图像传感,而 MCU 板处理内部设备的控制,例如驱动电机、切换 UV 灯和接收开关信号。计算机和MCU板通过USB线通过串行通信发送和接收控制信号。电脑将运行状态、轮毂电机转速、UV灯开/关、UV灯倾斜角度等信息传送至MCU板。MCU 板向计算机发送紧急停止信号。它还根据从计算机接收到的信号向车轮电机控制器和伺服电机发送旋转指令,并向紫外线灯继电器发送驱动信号。
成分
Amabie 有两节 12V 铅酸电池。它们串联并为电路提供 24V 电源。电池容量足以让 Amabie 最大功率运行 2 小时。
电池和 DC 24V 电源线通过断路器连接。它具有短路时断开电池和电路的作用,以及机器人主电源开关的作用。
AC 100V 电源线由 DC/AC 逆变器从 DC 24V 电源线产生。逆变器可以输出280W的功率,足以驱动15W的UV灯x10和一台15W的电脑。
Amabie 配备了紧急停止按钮。当按下该按钮或来自 MCU 板的使能信号被切断时,到接触器的电信号被切断。同时,DC/DC 转换器也停止。
车轮马达和紫外线灯通过接触器连接到电源。当按下紧急停止按钮或来自 MCU 板的 Enable 信号被切断时,接触器会关闭这些电路。
由于伺服电机的标称电压为 12V,DC/DC 转换器将 24V 电源线降压为 12V 并为伺服电机供电。
该电机控制器为电机厂家正品,通过CAN信号接收指令。CAN 信号从 MCU 板传输。
安装用于改变紫外光方向的伺服电机通过 RS485 信号接收目标角度指令。RS485 信号由微机板传输。
紫外线灯通过继电器连接到 100V 电源线。继电器由来自 MCU 板的信号打开/关闭。
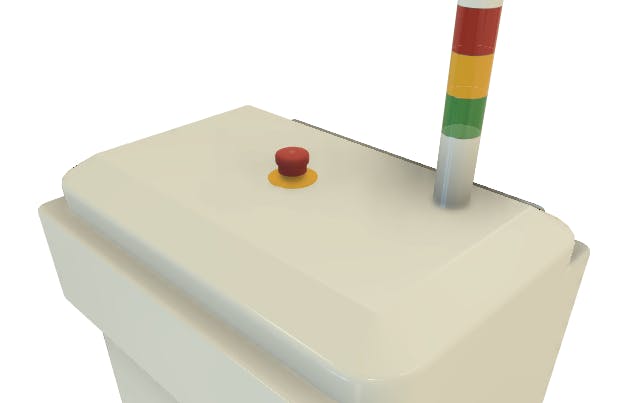
Amabie 配有塔式指示灯,可将机器人的运行状态告知用户。灯发出三种颜色。绿色:待机,黄色:运行,红色:错误。请注意,黄色指示灯闪烁。
安装在车轮电机上的电磁制动器用于使机器人紧急停止。全轮电机的制动器由来自 MCU 板的信号通过继电器激活。
与主机通信并向各设备发送信号的MCU板支持与主机的串行通信、24V数字I/O、RS485通信、CAN通信。
Amabie 具有紧急停止功能作为安全措施,以防人为错误或意外情况。当 Amabie 检测到人为入侵或内部问题时,它会切断供应给电动机和紫外线灯的电力并制动车轮电机,这意味着 Amabie 可以安全地停止运行。一旦 Amabie 执行紧急停止功能,程序会自动切换到紧急停止状态。然后,除非重新启动序列,否则它无法重新启动。
紧急停止按钮
如果用户或其他人注意到自己的危险或工作机器人的异常,他们可以通过按下安装在机身顶部的终止按钮来安全地停止 Amabie 的操作。断电按钮向电路上的接触器发出断电信号,直接切断电源,无需任何软件。因此,即使软件无法检测到意外问题,您也可以安全地停止 Amabie 的操作。
断路器
断路器可以检测电路上的过电流。如果发生短路,断路器会切断电池下方的所有电源线。因此,断路器避免了异常发热和火灾。
人体检测
安装在身体前上方的 3D 摄像头可以检测到人的存在。如果有人进入正在运行的 Amabie 面前,摄像头会检测到并立即停止 Amabie 的操作。检测算法的细节在软件部分。
电池观察员
如果在操作过程中电池电量耗尽,Amabie 可能会执行意外行为。电池观察器在操作期间始终监控电池的电压。如果观察者判断剩余电池电量过低,Amabie 会在电池电量耗尽之前安全停止。
人体进入感应信标
人员进入感应信标是用于扩展安全性的外部附件。信标由用户附在房间门附近的墙上,它监视通过门进入房间的人。它包含一个超声波距离传感器和一个蓝牙模块,并使用电池工作。尺寸非常小,L:60mm,W:60mm,H:25mm。如果有人在 Amabie 操作期间进入房间,信标会检测到它并将通知发送给 Amabie。收到它,阿玛比立即安全地停止了操作。
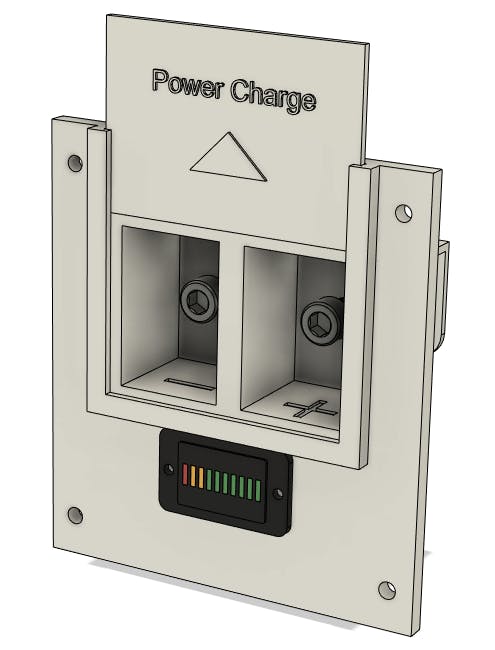
充电
在启动 Amabie 之前,请确保电池已充电。您可以通过机身背面下方的充电端口检查电池电量。如果指示灯未充满,则需要在启动前给电池充电。您可以使用 24V 铅酸电池的通用电池充电器为机器人电池充电。向上滑动充电口盖,按照充电口上的 +/- 标记装上充电器插头。充电器的使用方法请参阅各产品的使用说明书。
概述
Amabie软件是分布式的:有两个核心计算单元,即主计算机和MCU板。前者主要负责图像处理和决策;后者与模块通信并处理信号。
计算机
Amabie 的主计算机是 Jetson Xavier NX,它拥有高性能的节能 GPU。Ubuntu 18.04 LTS Bionic Beaver 安装为操作系统。在计算机上运行的所有实施软件均基于机器人操作系统 (ROS) Melodic Morenia,这是最流行的机器人平台。
单片机
Amabie上的MCU板是由STM32 Nucleo Board STM32F303RE(STMicroelectronics)、X-NUCLEO-PLC01A1(STMicroelectronics)和RS485 CAN Shield(Waveshare)组成的原创定制板。固件是在 Mbed 环境中实现的。该程序被描述为使Amabie的每个组件抽象并实现了可扩展性。程序的结构如图所示。
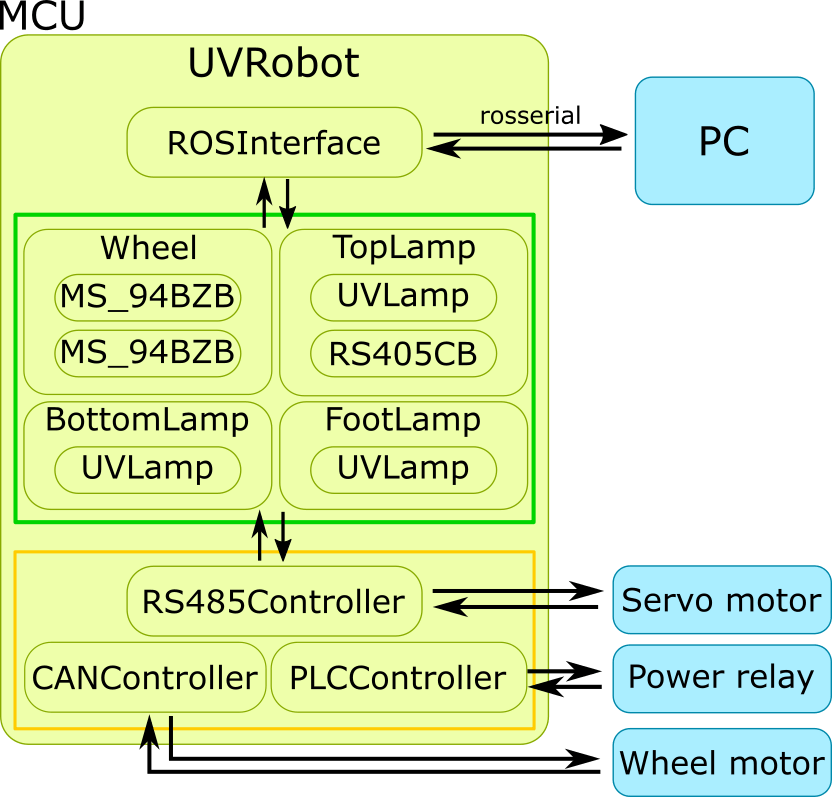
Amabie 的所有组件(例如轮子和紫外线灯)都被描述为类。此外,该程序还有一个用于发送和接收命令信号的类。支持的通信是使用rosserial 协议的串行通信、RS485 通信和CAN 通信。并且板子每个都有8ch 24V 数字PLC I/O 端口。
相机
Amabie 有四个摄像头:三个 Intel RealSense d435 RGB-D 摄像头和一个 Intel RealSense T265 跟踪摄像头。RGB-D相机可以拍摄深度照片;换句话说,它们不仅可以用作相机,还可以用作 LiDAR 传感器。两个 RGB-D 摄像头安装在前下方和后下方,以检测 Amabie 必须避开的障碍物。另一个 RGB-D 摄像头和跟踪摄像头安装在前上方。所有相机都通过高速 USB 3.1 电缆连接到主计算机。
基于 ROS 的软件
由于 ROS 被设计为一个分布式计算平台,每个软件都作为一个节点独立运行。主要节点描述如下。
模拟
尽管由于大流行导致大学停课,我们无法构建真正的原型,但我们使用 Choreonoid [14] 开发了一个模拟环境。由于 Choreonoid 支持光模拟作为以下快照,我们可以评估 Amabie 可以照亮的消毒区域
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉


全部0条评论

快来发表一下你的评论吧 !
