



分享资料个
“Segbot”是 UIUC 的 SE 423 级平衡 segway 机器人。segbot 由 Dan Block (d-block@illinois.edu) 教授设计的电路板和 F28379D 微控制器组成,该微控制器是德州仪器 C2000 系列的一部分。该项目的目标是通过蓝牙向 segbot 无线发送转向命令。
蓝牙 LE UART Friend 与 Bluefruit Connect 应用程序兼容。字符通过UART传输到segbot,可以在计算机终端上查看。从 segbot 传输的字符可以在应用程序中查看或绘制。在我的演示中,我从手机发送了加速度计数据,并用它来引导 segbot 通过障碍物。
传入的加速度计数据由前缀“!A”标识,后跟三个浮点值。由于数据是通过 UART 传输的,因此无法立即解释原始值。实现了一个联合,将六个 16 位整数与三个 32 位浮点数存储在内存中的同一位置。
typedef union phonedata_s{
uint16_t rawdata[6];
float fltdata[3];
}phonedata_t;
phonedata_t phoneaccel; //use new data type defined in union
下面的代码在串行接收函数中。首先,传入的 8 位值保存在过去状态的数组中。然后通过查找前缀“!A”来筛选这些值以确定它是否是加速度计数据。然后,与加速度计数据对应的值组合成 16 位整数并保存为上面定义的新数据类型。然后,这些值存储为浮点数。
if((past[0] == '!')&&(past[1] == 'A')){
//incoming accelerometer data
//X
phoneaccel.rawdata[0] = (past[3]<<8)|past[2];
phoneaccel.rawdata[1] = (past[5]<<8)|past[4];
//Y
phoneaccel.rawdata[2] = (past[7]<<8)|past[6];
phoneaccel.rawdata[3] = (past[9]<<8)|past[8];
//Z
phoneaccel.rawdata[4] = (past[11]<<8)|past[10];
phoneaccel.rawdata[5] = (past[13]<<8)|past[12];
ble_x = phoneaccel.fltdata[0];
ble_y = phoneaccel.fltdata[1];
ble_z = phoneaccel.fltdata[2];
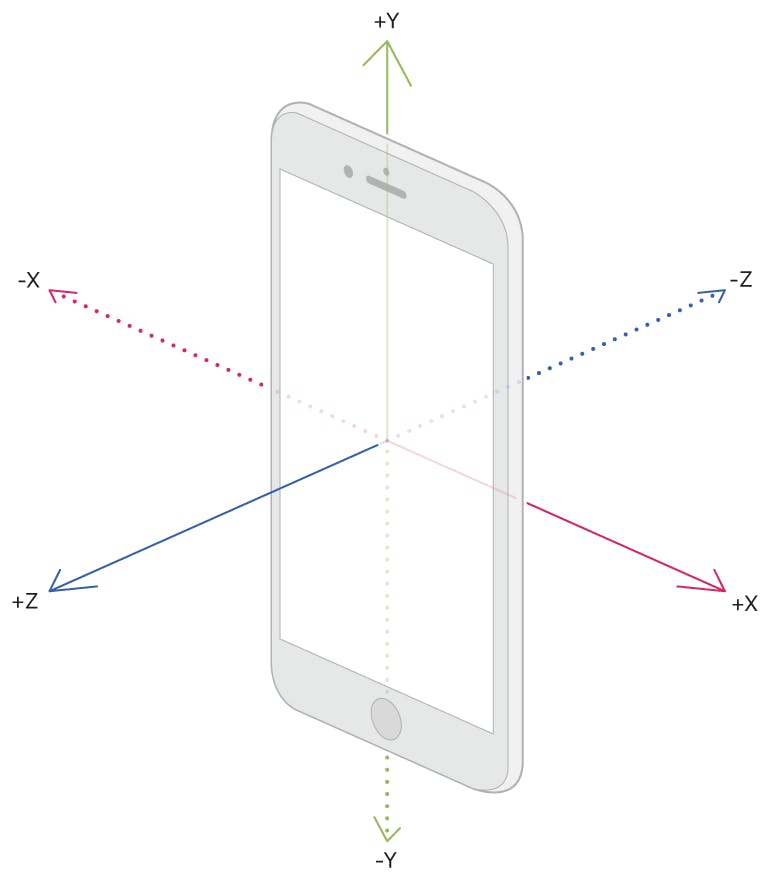
在加速度计数据被标记后,仍然在串行接收功能中,对应于 x、y 和 z 方向上的加速度的三个浮点数被解释为 segbot 的转向指令。segbot 通过更改“turnrate”和“FwdBackOffset”值来驱动。假设手机将被侧向操纵,y 加速度的变化对应于转向指令,z 加速度的变化对应于向前和向后的运动。
当加速度在指定方向达到某个阈值时,发出转向指令。阈值是这样的,即故意改变手机位置将引导 segbot,但方向的小幅波动不会。转向速度已调整为我认为最容易转向的速度,但可以调整为更快或更慢。
//Interpret phone accel data as steering instructions
if(ble_y >= 0.3){
//turn left
turnrate = -4.0;
}else if(ble_y <= -0.3){
//turn right
turnrate = 4.0;
}else if(fabs(ble_y) < 0.3){
//don't turn
turnrate = 0;
}
if(ble_z <= -0.3){
//go forward
FwdBackOffset = -1.0;
}else if(ble_z >= 0.3){
//go backward
FwdBackOffset = 1.0;
}else if(fabs(ble_z) < 0.3){
//don't go forward or backward
FwdBackOffset = 0;
}
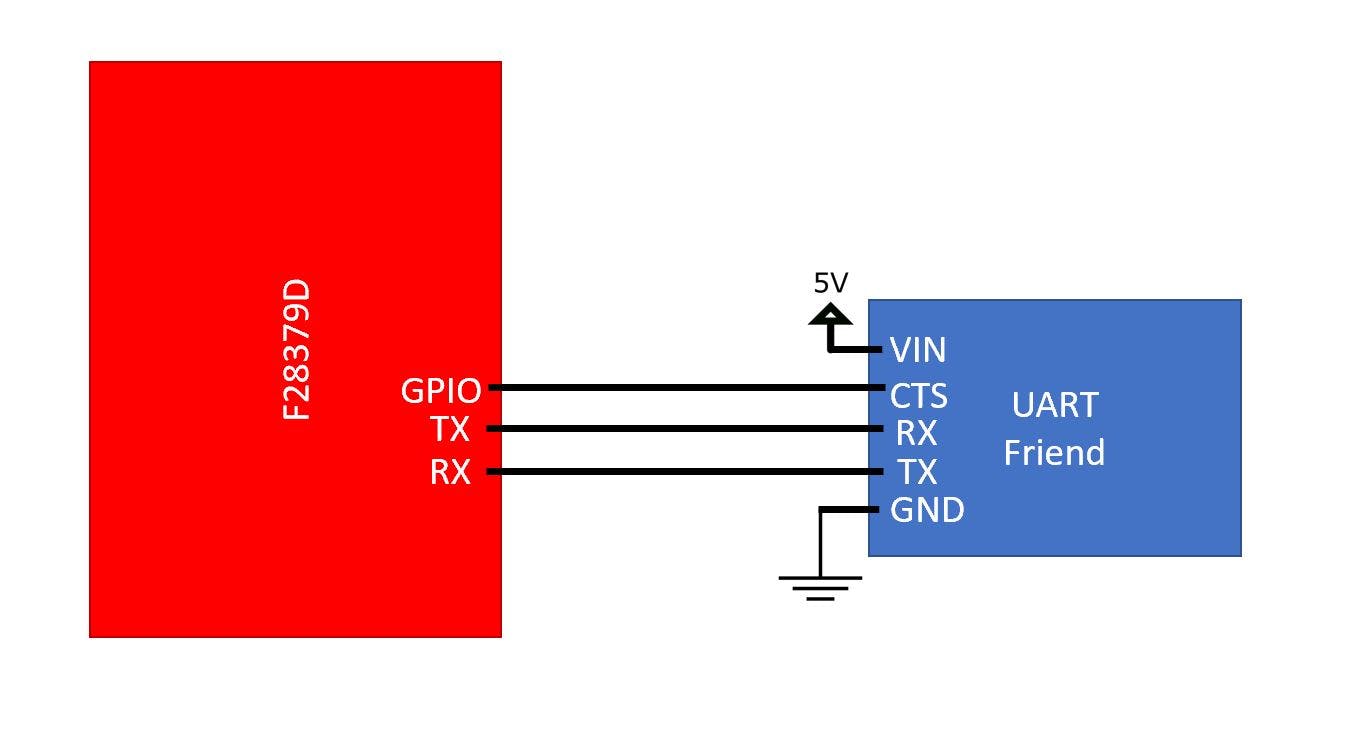
上图显示了 UART Friend 到 segbot 的接线图。蓝牙传感器连接到 5 V 电源。芯片的接收线连接到segbot的发送线,发送线连接到segbot的接收线,对应F28739D处理器的Serial C。为了在数据模式下工作,蓝牙芯片的 CTS 引脚必须接地。它连接到 GPIO 引脚并设置为低电平,从而可以通过编辑代码轻松更改模式。
当 segbot 完成障碍赛时,它会通过蜂鸣器播放 Kool & The Gang 的“Celebration”并跳一段小舞。当麦克风听到我的欢呼声时会触发此响应。这是由大约 625 Hz 的频率识别的,我使用频率分析仪应用程序发现了这个频率。麦克风以 10 kHz 的速率进行采样,并通过 Goertzel 算法传递数据,该算法搜索 625 Hz 的目标频率。在我的另一个项目中有更多关于音符检测以及歌曲和舞蹈的信息,链接在这里。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
