



香香技术员
分享资料个
方案介绍
整个PiPico线跟随机器人可以分为3个部分:传感器部分、控制部分和驱动部分。
传感器部分:
本部分包含 IR 二极管、电位计、比较器(运算放大器)和 LED。电位器用于设置比较器一端的参考电压,IR 传感器用于检测线路并提供比较器第二端的电压变化。然后比较器比较两个电压并在输出端生成数字信号。在这个线路跟随器电路中,我们为两个传感器使用了两个比较器。LM 358 用作比较器。LM358 内置了两个低噪声运算放大器。
使用 Pi Pico 的 Line Follower Robot 工作
与线追随者一起工作非常有趣。Line Follower 机器人通过传感器感应到黑线,然后将信号发送给 Pico。然后 pico 根据传感器的输出驱动电机。

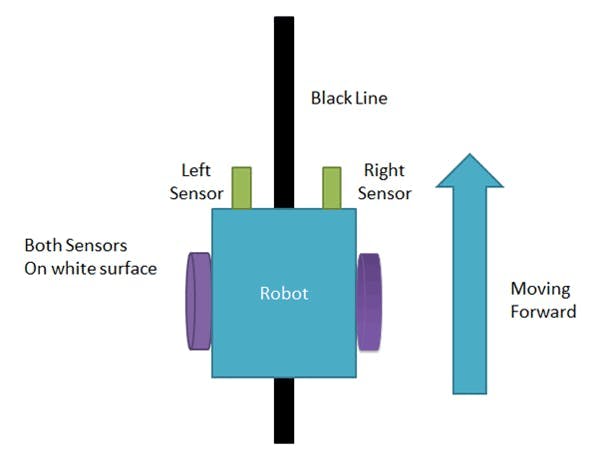
该项目使用两个红外传感器模块,即左传感器和右传感器。当左右传感器都感应到白色时,机器人向前移动。
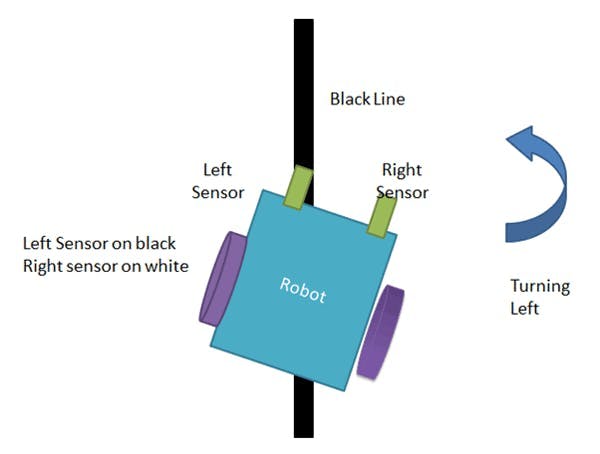
如果左侧传感器位于黑线上,则机器人转向左侧。
如果右侧传感器检测到黑线,则机器人转向右侧,直到两个传感器都位于白色表面。当白色表面出现时,机器人开始再次向前移动。
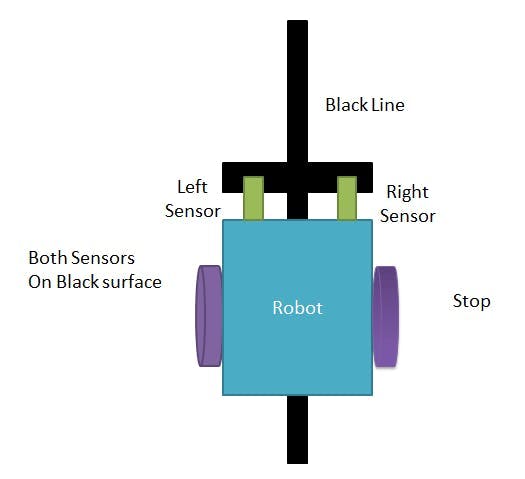
如果两个传感器都位于黑线上,则机器人停止。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
