



久醉不醒
分享资料个
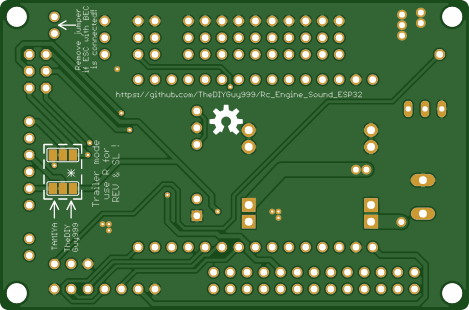
电路板如下图: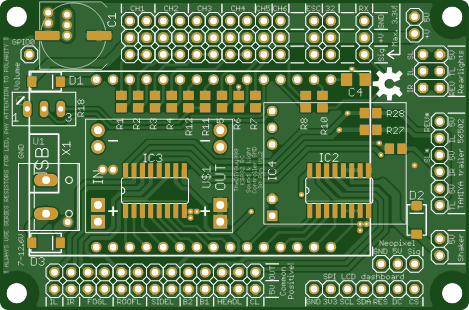


描述
用于 ESP32 的带有惯性模拟的 Arduino RC 发动机声光控制器
特征:
独特的车辆质量惯性模拟(将履带式ESC连接到引脚33)。在机械3速变速器换档过程中,节气门输出会发生变化,以实现平稳换档、档位保护和真实声音。适用于TAMIYA 3速变速器。履带式2速变速器也能正常工作。ESC由具有以下状态的状态机控制:向前行驶和向后行驶(可变加速,取决于节气门位置)、空档、向前和向后制动(根据“反向节气门”位置,具有精细粒度的可变减速度)。它还允许正确控制刹车灯、刹车声、倒车灯和倒车嘟嘟声。每个档位的加速和减速(滑行和制动)可单独调节,以确保最大的真实性。
独特的“虚拟离合器”允许发动机转速低于可调节的ESC输出速度。上面,离合器接合并确保发动机声音与车轮转速同步。声音和行为与换挡变速器完美结合!
带变矩器的模拟自动变速器(如果您的车辆没有真正的换档变速器)
模拟双离合器变速器
模拟手动换档3速变速器(v5.5中的新功能)
虚拟的、可切换的空档允许在静止状态下加速发动机
Jake制动器(模拟气动发动机制动器,主要用于美国卡车)
跟踪模式(CH2和CH3上的双油门输入,用于坦克、挖掘机等。此模式不支持ESC控制。(4.5版新增)
坦克大炮声音和闪光(v4.6中的新功能)
使用rcTrigger库触发每个模拟通道的多个锁存和非锁存动作(声音、灯光)(v4.7中的新功能,仍处于实验阶段)
许多可选择的声音:发动机启动、发动机怠速、发动机转速、涡轮呜呜声、柴油点火“爆震”声、废气旁通阀、喇叭、警报器、倒车嘟嘟声、空气制动、驻车制动、换档等。
真实的发动机声音在飞行中混合在一起,最多有4种声音:发动机怠速、涡轮增压器、废气旁通阀(均具有可变采样率)、柴油机点火爆震(固定采样率,因此音调不会变化)
负载(节气门位置)相关的音量声音:怠速、转速、柴油爆震
发动机转速相关音量声音:涡轮增压器、废气旁通阀
包括数十种引擎和其他声音,您也可以使用Audacity和bitlunis转换工具编写自己的声音(上面的链接)
发动机转速范围和惯性可调,所有声音的音量可调,发动机声音分别用于负载和怠速。
许多其他参数可以调整。所有调整都可以在“adjustmentsXyz.h”中轻松访问
声音文件最高可达22'050Hz,8bit,可使用单声道
兼容输入信号:PWM、PPM、SBUS(反相和非反相信号)、IBUS
与PAM8403放大器模块配合使用效果最佳,该模块通过10kOhm电阻器和10kOhm电位计连接至引脚25和26(见下图)
根据针脚13上的RC信号输入计算发动机转速***注意,所有针脚上的最大值为3.3V!***建议在所有I/O引脚上使用330欧姆电阻器!
可以在“曲线.h”中生成非线性节气门曲线
灯光效果:前照灯(远光和近光灯)、尾灯、刹车灯、雾灯、顶灯、驾驶室灯、倒车灯、指示灯(转向信号灯)、危险灯、蓝光灯等(最多12个输出)
发动机振动模拟,使用具有偏心重量的振动电机:盘车时强烈振动,中等怠速,转速时轻微振动
可调音量(通过遥控器)
使用ESP32,CPU频率必须设置为240MHz
包括Eagle原理图和电路板文件。预先制作的Gerber文件可以让您轻松订购板。
包括易于使用的.wav到.h声音文件转换器
使用“remoteSetup.h”可以轻松分配频道
Flysky FS-i6X和Arduino Mirco RC遥控器的预制配置文件(5.5版新增)
喇叭和警报器的可变长度,使用声音文件中的循环区域(v5.6中的新功能)
用于转向伺服和换档伺服的总线解码器(将伺服连接到CH1和CH2)引脚
拖车耦合器(第五轮)伺服可连接到CH4引脚(不在PWM通信模式下)
TAMIYA拖车存在开关可连接至引脚32(取决于“6_adjustmentsLights.h”选项卡中的“#define THIRD_BRAKELIGHT”设置)
支持非线性油门和转向曲线(以便围绕中心位置进行更精确的控制)。在“2_adjustmentsRemote.h”中使用“EXPONENTIAL_THROTTLE”和“EXPONNTIAL_STEERING”
支持HOBBYWING Quicrun Fusion Motor/ESC组合。在“3_adjustmentsESC.h”中使用“#define QUICRUN_FUSION”
绞车支架,连接至CH3(仅总线通信模式)。使用“7_adjustmentsServo.h”中的“#define MODE2_WINCH”,然后使用模式2按钮通过CH4在喇叭/警报声控制和绞盘控制之间切换。绞车由一个旧的RC伺服驱动板控制。使用“CH3L”、CH3C”和CH3R”位置进行速度和空档设置。
支持LCD仪表板
支持
支持液压挖掘机(液压泵、液压流量、履带嘎嘎声)。使用#define FLYSKY_FS_I6S_EXCAVATOR 配置文件进行远程
基于 ESP-NOW 的 2.4 GHz无线拖车控制支持
可以使用 RZ7886 电机驱动器 IC 代替标准履带式 RC ESC
电池低放电保护选项
可切换的爬虫模式(具有最小的虚拟惯性)
代码
完整的 GitHub 存储库:
https://github.com/TheDIYGuy999/Rc_Engine_Sound_ESP32
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
