



分享资料个
这是我在 TensorFlow 下与 Google Summer of Code (GSoC) 合作的第二个项目。互联网上没有合适的文档来构建自定义图像识别 TinyML 模型,因此我的 GSoC 导师 Paul Ruiz 建议我尝试解决它。您还可以通过以下方式构建图像识别 TinyML 应用程序。快乐修补!
单击此处查看我的第一个 GSoC 项目!
我想解决一个变量较少的问题,因为有关如何使用相机模块和处理其数据的文档不是很好。我选择构建一个 MNIST TinyML 模型,因为在这种情况下,我不需要担心训练数据集,它可以让我专注于项目的重要部分,以启动和运行项目。但是,既然我已经了解了构建自定义图像识别项目的所有部分,我已经记录了如何使用相机模块收集训练数据集。
我想警告您,这个博客可能有点难以理解。对此有一个正确的解释:使用基于加速度计的应用程序,只需在串行监视器或绘图仪上打印出一个轴的加速度计值,就可以很容易地进行健全性检查。相比之下,对图像识别应用程序进行健全性检查至少要烦人 10 倍,因为检查一段代码是否正在执行所需的操作无法实时可视化。
由于单元测试的复杂性,这篇博客可能有点难以理解。我想通过读者的反馈来解决解释中的任何差距。因此,请在下方评论您对嵌入式系统图像识别相关的任何疑问和问题。
我建议您通读TinyML 书的作者 Pete Warden 撰写的这篇精彩文章,以了解为什么在微控制器上运行机器学习模型是有意义的,并且是机器学习的未来。
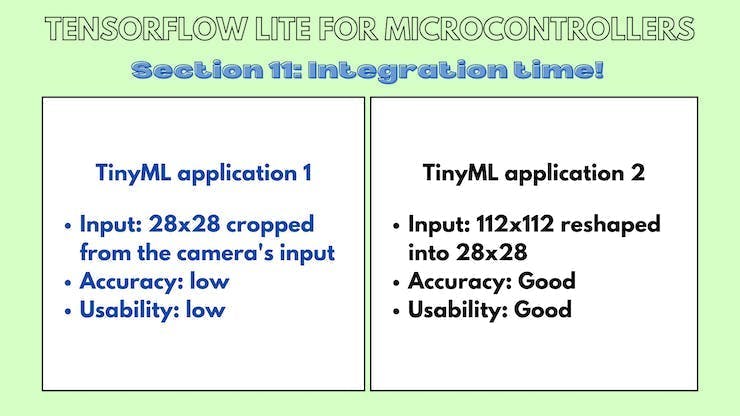
我们将在此处使用的 OV7670 相机输出的完整 VGA(640×480 分辨率)对于当前的 TinyML 应用程序来说太大了。uTensor 通过使用 28×28 图像的 MNIST 运行手写检测。TensorFlow Lite for Microcontrollers 示例中的人员检测示例使用 96×96,这已经足够了。即使是最先进的“Big ML”应用程序也通常只使用 320×320 的图像。总之,在微型微控制器上运行图像识别应用程序非常有意义

11.a TinyML 模型:裁剪输入数据
本小节的 Github 链接。
代码解释:
Camera.readFrame(pixels);
这行代码从相机读取一帧并将其存储在像素数组中。
for(int i =0; i<28;i++){
for(int j =0;j<28;j++){
pixel = pixels[176*i +j];
tft.drawPixel(i,j,pixel);
}
}
delay(1000);
这些代码行循环遍历像素数组,从中裁剪出 28x28 图像并将其显示在屏幕上。
for(int i =0; i<28;i++){
for(int j =0;j<28;j++){
pixel = pixels[176*i +j];
red = ((pixel >> 11) & 0x1f) << 3;
green = ((pixel >> 5) & 0x3f) << 2;
blue = ((pixel >> 0) & 0x1f) << 3;
grayscale = (red + blue + green)/3 ;
if(grayscale <128){
grayscale =0;
}
tflInterpreter->input(0)->data.f[28*i+j] = grayscale / 255;
Serial.println(grayscale);
}
}
这些代码行循环遍历像素数组,从中裁剪出 28x28 图像并将其作为输入发送到 TinyML 模型。
素描:
//MPU6050_model.ino
#include
#include "tensorflow/lite/micro/micro_error_reporter.h"
#include "tensorflow/lite/micro/micro_interpreter.h"
#include "tensorflow/lite/micro/micro_mutable_op_resolver.h"
#include "tensorflow/lite/schema/schema_generated.h"
#include "tensorflow/lite/version.h"
#include "model.h"
#include // Core graphics library
#include // Hardware-specific library for ST7735
#include
#include
const tflite::Model* tflModel = nullptr;
tflite::ErrorReporter* tflErrorReporter = nullptr;
TfLiteTensor* tflInputTensor = nullptr;
TfLiteTensor* tflOutputTensor = nullptr;
tflite::MicroInterpreter* tflInterpreter = nullptr;
#define TFT_CS A7
#define TFT_RST 7 // Or set to -1 and connect to Arduino RESET pin
#define TFT_DC A6
constexpr int tensorArenaSize = 140 * 1024;
uint8_t tensorArena[tensorArenaSize];
float out[10];
uint16_t pixels[176*144];
uint16_t color, pixel;
uint8_t red, blue, green;
float grayscale;
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_RST);
void setup() {
Serial.begin(115200);
while (!Serial)
delay(10);
tft.initR(INITR_BLACKTAB);
delay(100);
if (!Camera.begin(QCIF, RGB565, 1)) {
Serial.println("Failed to initialize camera!");
while (1);
}
Serial.println(F("Initialized"));
static tflite::MicroErrorReporter micro_error_reporter;
tflErrorReporter = µ_error_reporter;
tflModel = tflite::GetModel(model);
if (tflModel->version() != TFLITE_SCHEMA_VERSION) {
TF_LITE_REPORT_ERROR(tflErrorReporter,
"Model provided is schema version %d not equal "
"to supported version %d.",
tflModel->version(), TFLITE_SCHEMA_VERSION);
return;
}
static tflite::MicroMutableOpResolver<6> micro_op_resolver;
micro_op_resolver.AddMaxPool2D();
micro_op_resolver.AddConv2D();
micro_op_resolver.AddDepthwiseConv2D();
micro_op_resolver.AddFullyConnected();
micro_op_resolver.AddReshape();
micro_op_resolver.AddSoftmax();
static tflite::MicroInterpreter static_interpreter(tflModel, micro_op_resolver, tensorArena, tensorArenaSize, tflErrorReporter);
tflInterpreter = &static_interpreter;
TfLiteStatus allocate_status = tflInterpreter->AllocateTensors();
if (allocate_status != kTfLiteOk) {
TF_LITE_REPORT_ERROR(tflErrorReporter, "AllocateTensors() failed");
return;
}
tflInputTensor = tflInterpreter->input(0);
tft.fillScreen(ST77XX_BLACK);
delay(100);
tft.fillScreen(ST77XX_BLACK);
}
void loop() {
Camera.readFrame(pixels);
for(int i =0; i<28;i++){
for(int j =0;j<28;j++){
pixel = pixels[176*i +j];
tft.drawPixel(i,j,pixel);
}
}
delay(1000);
for(int i =0; i<28;i++){
for(int j =0;j<28;j++){
pixel = pixels[176*i +j];
red = ((pixel >> 11) & 0x1f) << 3;
green = ((pixel >> 5) & 0x3f) << 2;
blue = ((pixel >> 0) & 0x1f) << 3;
grayscale = (red + blue + green)/3 ;
if(grayscale <128){
grayscale =0;
}
tflInterpreter->input(0)->data.f[28*i+j] = grayscale / 255;
Serial.println(grayscale);
}
}
delay(1000);
TfLiteStatus invokeStatus = tflInterpreter->Invoke();
out[0] = tflInterpreter->output(0)->data.f[0];
out[1] = tflInterpreter->output(0)->data.f[1];
out[2] = tflInterpreter->output(0)->data.f[2];
out[3] = tflInterpreter->output(0)->data.f[3];
out[4] = tflInterpreter->output(0)->data.f[4];
out[5] = tflInterpreter->output(0)->data.f[5];
out[6] = tflInterpreter->output(0)->data.f[6];
out[7] = tflInterpreter->output(0)->data.f[7];
out[8] = tflInterpreter->output(0)->data.f[8];
out[9] = tflInterpreter->output(0)->data.f[9];
float maxVal = out[0];
int maxIndex = 0;
for(int k =0; k < 10;k++){
if (out[k] > maxVal) {
maxVal = out[k];
maxIndex = k;
}
}
Serial.print("Number ");
Serial.print(maxIndex);
Serial.println(" detected");
Serial.print("Confidence: ");
Serial.println(maxVal);
}
11.b TinyML 模型:重塑输入数据
本小节的 Github 链接。
代码解释:
Camera.readFrame(pixels);
这行代码从相机读取一帧并将其存储在像素数组中。
for(int i =0; i<112;i++){
for(int j =0;j<112;j++){
tft.drawPixel(i,j,pixels[176*i+j]);
Serial.print("");
}
}
这些代码行循环遍历像素数组,从中裁剪出 112x112 图像并将其显示在屏幕上。
Serial.println("");
for(int i =0; i< 28; i++)
{
for(int j =0; j < 28; j++)
{
int sum =0;
for(int k =0; k<4;k++)
{
for(int l =0; l<4; l++)
{
sum += pixels[4*(176*i+j) + 176 * k + l];
}
}
sum = sum /16;
//arr1[i*28+j] = sum;
tflInterpreter->input(0)->data.f[28*i+j] = float(sum / 255.0);
Serial.print(sum);
Serial.print(", ");
}
Serial.println("");
}
这些代码行通过像素数组循环裁剪 112x112 图像,将其重新整形为 28x28 图像,并将其发送到 TinyML 模型。
素描:
//MPU6050_model.ino
#include
#include "tensorflow/lite/micro/micro_error_reporter.h"
#include "tensorflow/lite/micro/micro_interpreter.h"
#include "tensorflow/lite/micro/micro_mutable_op_resolver.h"
#include "tensorflow/lite/schema/schema_generated.h"
#include "tensorflow/lite/version.h"
#include "model.h"
#include // Core graphics library
#include // Hardware-specific library for ST7735
#include
#include
const tflite::Model* tflModel = nullptr;
tflite::ErrorReporter* tflErrorReporter = nullptr;
TfLiteTensor* tflInputTensor = nullptr;
TfLiteTensor* tflOutputTensor = nullptr;
tflite::MicroInterpreter* tflInterpreter = nullptr;
#define TFT_CS A7
#define TFT_RST 7 // Or set to -1 and connect to Arduino RESET pin
#define TFT_DC A6
constexpr int tensorArenaSize = 140 * 1024;
uint8_t tensorArena[tensorArenaSize];
float out[10];
uint16_t pixels[176*144];
uint16_t color, pixel;
uint8_t red, blue, green;
int grayscale;
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_RST);
void setup() {
Serial.begin(9600);
while (!Serial)
delay(10);
tft.initR(INITR_BLACKTAB);
delay(1000);
if (!Camera.begin(QCIF, RGB565, 1)) {
Serial.println("Failed to initialize camera!");
while (1);
}
Serial.println(F("Initialized"));
static tflite::MicroErrorReporter micro_error_reporter;
tflErrorReporter = µ_error_reporter;
tflModel = tflite::GetModel(model);
if (tflModel->version() != TFLITE_SCHEMA_VERSION) {
TF_LITE_REPORT_ERROR(tflErrorReporter,
"Model provided is schema version %d not equal "
"to supported version %d.",
tflModel->version(), TFLITE_SCHEMA_VERSION);
return;
}
static tflite::MicroMutableOpResolver<6> micro_op_resolver;
micro_op_resolver.AddMaxPool2D();
micro_op_resolver.AddConv2D();
micro_op_resolver.AddDepthwiseConv2D();
micro_op_resolver.AddFullyConnected();
micro_op_resolver.AddReshape();
micro_op_resolver.AddSoftmax();
static tflite::MicroInterpreter static_interpreter(tflModel, micro_op_resolver, tensorArena, tensorArenaSize, tflErrorReporter);
tflInterpreter = &static_interpreter;
TfLiteStatus allocate_status = tflInterpreter->AllocateTensors();
if (allocate_status != kTfLiteOk) {
TF_LITE_REPORT_ERROR(tflErrorReporter, "AllocateTensors() failed");
return;
}
tflInputTensor = tflInterpreter->input(0);
tft.fillScreen(ST77XX_BLACK);
delay(100);
}
void loop() {
Camera.readFrame(pixels);
tft.fillScreen(ST77XX_BLACK);
for(int i =0; i<112;i++){
for(int j =0;j<112;j++){
tft.drawPixel(i,j,pixels[176*i+j]);
Serial.print("");
}
}
// delay(1000);
for(int i =0; i<112;i++){
for(int j =0;j<112;j++){
pixel = pixels[176*i +j];
red = ((pixel >> 11) & 0x1f) << 3;
green = ((pixel >> 5) & 0x3f) << 2;
blue = ((pixel >> 0) & 0x1f) << 3;
grayscale = (red + blue + green)/3 ;
if(grayscale <160){
grayscale =0;
}
pixels[176*i +j] = grayscale;
//tflInterpreter->input(0)->data.f[28*i+j] = grayscale / 255;
}
}
Serial.println("");
for(int i =0; i< 28; i++)
{
for(int j =0; j < 28; j++)
{
int sum =0;
for(int k =0; k<4;k++)
{
for(int l =0; l<4; l++)
{
sum += pixels[4*(176*i+j) + 176 * k + l];
}
}
sum = sum /16;
//arr1[i*28+j] = sum;
tflInterpreter->input(0)->data.f[28*i+j] = float(sum / 255.0);
Serial.print(sum);
Serial.print(", ");
}
Serial.println("");
}
delay(1000);
TfLiteStatus invokeStatus = tflInterpreter->Invoke();
out[0] = tflInterpreter->output(0)->data.f[0];
out[1] = tflInterpreter->output(0)->data.f[1];
out[2] = tflInterpreter->output(0)->data.f[2];
out[3] = tflInterpreter->output(0)->data.f[3];
out[4] = tflInterpreter->output(0)->data.f[4];
out[5] = tflInterpreter->output(0)->data.f[5];
out[6] = tflInterpreter->output(0)->data.f[6];
out[7] = tflInterpreter->output(0)->data.f[7];
out[8] = tflInterpreter->output(0)->data.f[8];
out[9] = tflInterpreter->output(0)->data.f[9];
float maxVal = out[0];
int maxIndex = 0;
for(int k =0; k < 10;k++){
if (out[k] > maxVal) {
maxVal = out[k];
maxIndex = k;
}
}
Serial.print("Number ");
Serial.print(maxIndex);
Serial.println(" detected");
Serial.print("Confidence: ");
Serial.println(maxVal);
}
12.a LCD显示的色彩空间与ov7670不匹配
当显示来自相机实时馈送的图像时,会弹出各种颜色渐变,我不完全确定为什么会发生这种情况,但我猜测这是由于转换之间的颜色空间信息丢失所致。

12.b LCD 在打印每个像素后刷新
我使用的方法基本上是逐像素打印。Adafruit_st7735 的问题在于它会在打印像素后自动发送缓冲区。我认为在库中注释掉发送缓冲区的代码行是一个简单的修复。
12.c相机指向哪里
构建此示例时的主要痛点之一是试图找出相机指向的位置。如果一块小的 3D 打印矩形塑料片可以帮助大致观察相机所注视的位置,这将在收集训练数据和测试应用程序时大有帮助。


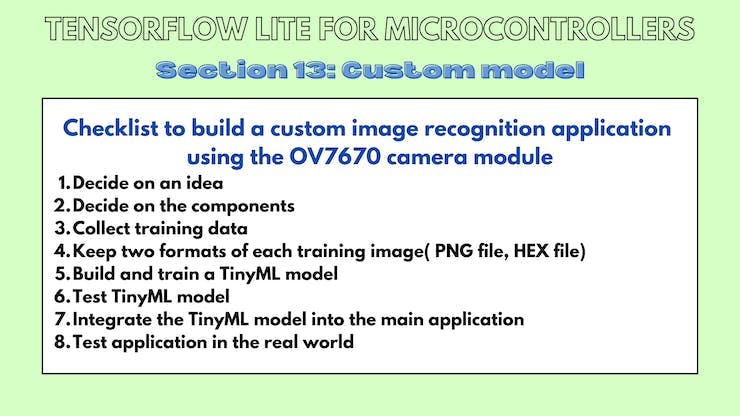
为什么是这个部分?
您可能已经对构建此应用程序的数千个步骤和弯路感到困惑,因此这里列出了可简化构建下一个图像识别应用程序的事项。
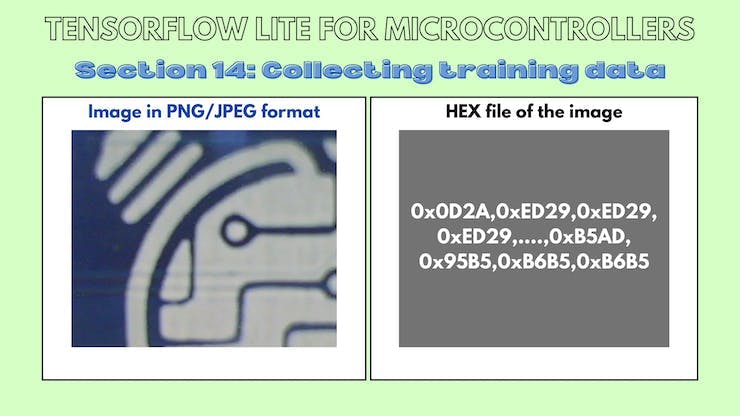
14.a 草图
此草图从相机读取帧并在串行监视器上输出 RGB565 值。
/*
OV767X - Camera Test Pattern
This sketch waits for the letter 'c' on the Serial Monitor,
it then reads a frame from the OmniVision OV7670 camera and
prints the data to the Serial Monitor as a hex string.
The website https://rawpixels.net - can be used the visualize the data:
width: 176
height: 144
RGB565
Little Endian
Circuit:
- Arduino Nano 33 BLE board
- OV7670 camera module:
- 3.3 connected to 3.3
- GND connected GND
- SIOC connected to A5
- SIOD connected to A4
- VSYNC connected to 8
- HREF connected to A1
- PCLK connected to A0
- XCLK connected to 9
- D7 connected to 4
- D6 connected to 6
- D5 connected to 5
- D4 connected to 3
- D3 connected to 2
- D2 connected to 0 / RX
- D1 connected to 1 / TX
- D0 connected to 10
This example code is in the public domain.
*/
#include
unsigned short pixels[176 * 144]; // QCIF: 176x144 X 2 bytes per pixel (RGB565)
void setup() {
Serial.begin(9600);
while (!Serial);
Serial.println("OV767X Camera Capture");
Serial.println();
if (!Camera.begin(QCIF, RGB565, 1)) {
Serial.println("Failed to initialize camera!");
while (1);
}
Serial.println("Camera settings:");
Serial.print("\twidth = ");
Serial.println(Camera.width());
Serial.print("\theight = ");
Serial.println(Camera.height());
Serial.print("\tbits per pixel = ");
Serial.println(Camera.bitsPerPixel());
Serial.println();
Serial.println("Send the 'c' character to read a frame ...");
Serial.println();
}
void loop() {
if (Serial.read() == 'c') {
Serial.println("Reading frame");
Serial.println();
Camera.readFrame(pixels);
int numPixels = Camera.width() * Camera.height();
for (int i = 0; i < numPixels; i++) {
unsigned short p = pixels[i];
if (p < 0x1000) {
Serial.print('0');
}
if (p < 0x0100) {
Serial.print('0');
}
if (p < 0x0010) {
Serial.print('0');
}
Serial.print(p, HEX);
}
}
}
我感谢我的 GSoC 导师 Paul Ruiz,他在整个项目中指导我!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
