



分享资料个
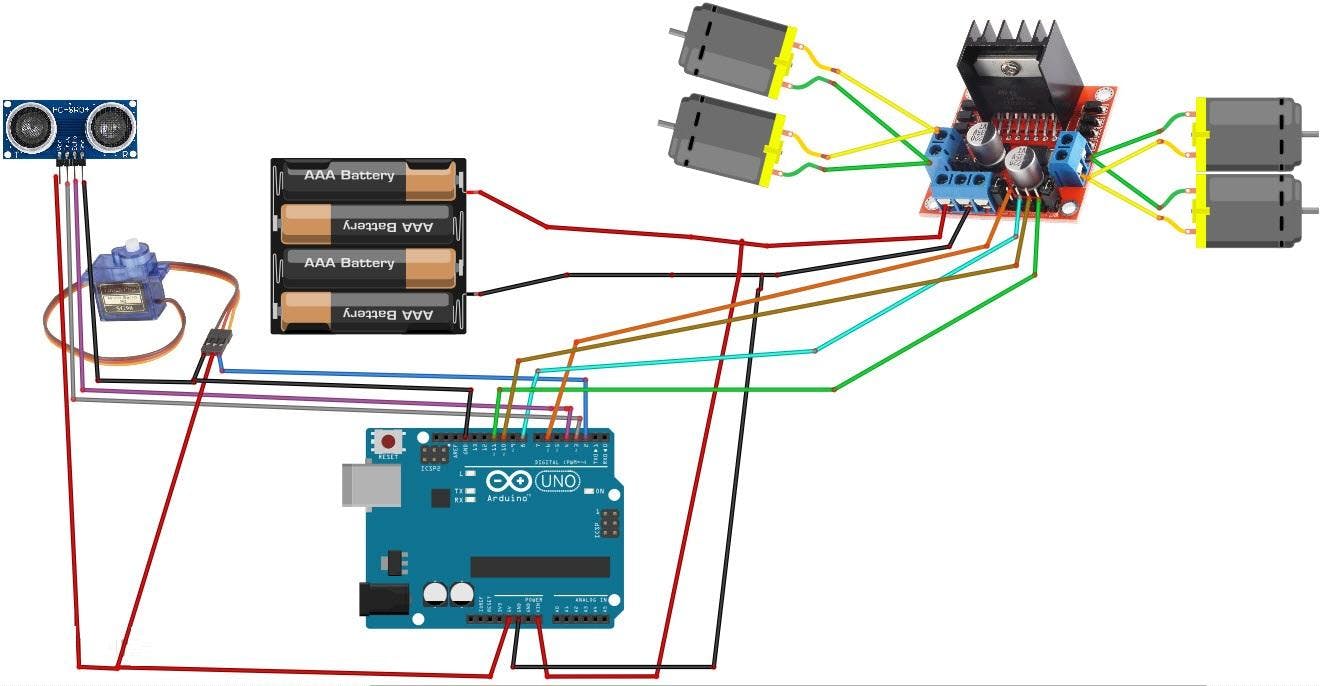
在本教程中,我们将使用连接到伺服电机的 HC-SR04 超声波传感器制作带有雷达的 Arduino 避障机器人汽车。
为什么这个项目比其他所有“避障车”项目都好,因为那里的大多数项目只检测前面的障碍物,然后伺服检查左侧或右侧并决定机器人应该去哪里,所以没有对所有角度的实时检测。
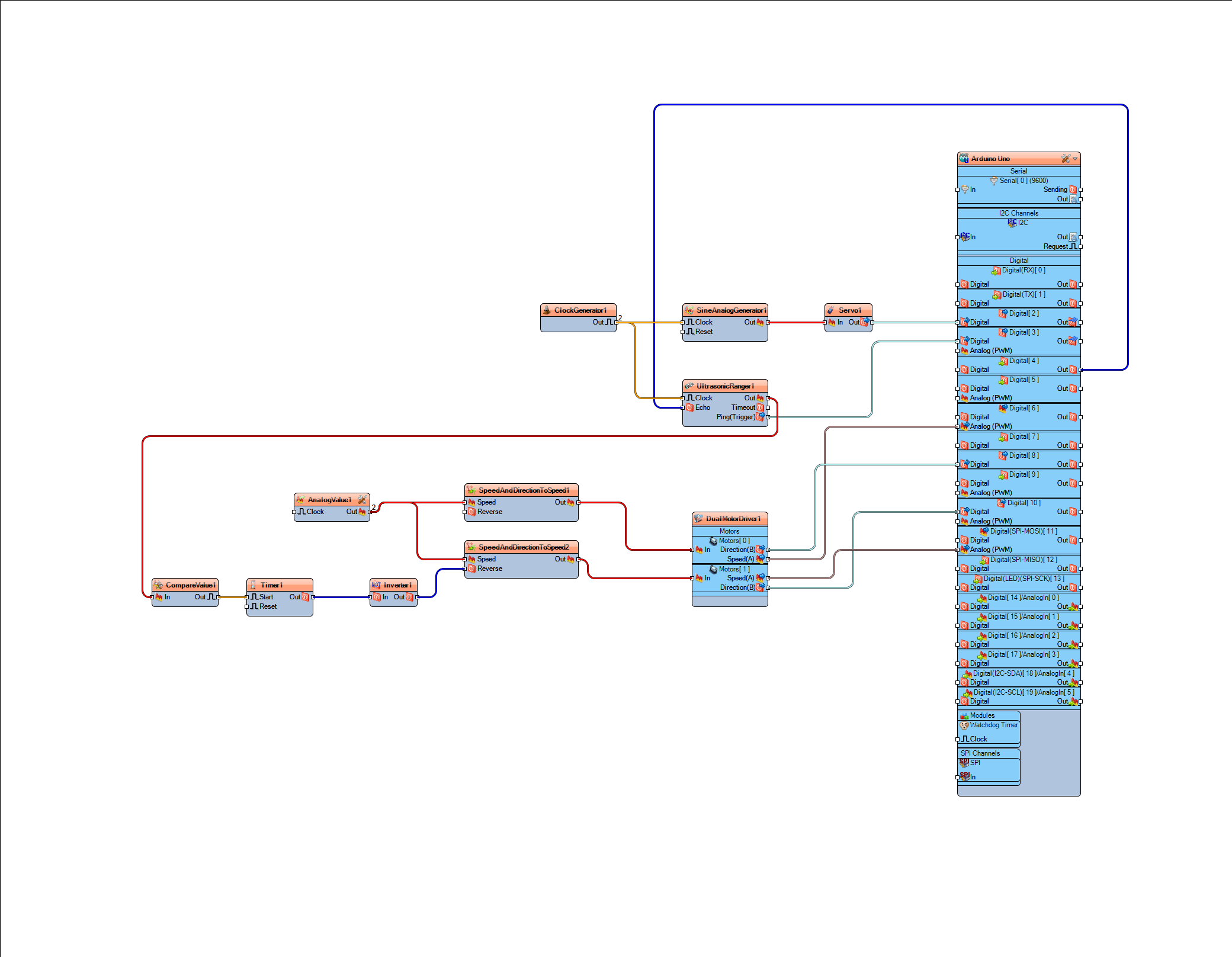
在这辆机器人车上,伺服器一直将超声波从左侧旋转到右侧,就像雷达一样,一旦在任何一点上检测到障碍物,就会触发反向,并且行进方向是变了。
“雷达”探测的角度可以调整,探测的距离也可以调整。

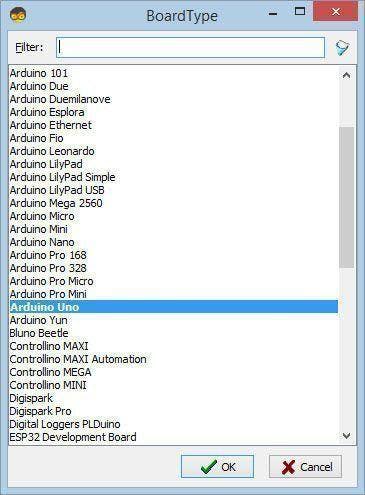
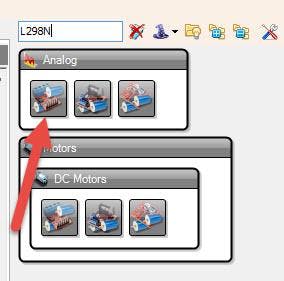
需要安装Visuino:https ://www.visuino.eu。如图1所示启动Visuino 单击Visuino中Arduino组件(图1)上的“工具”按钮 出现对话框时,选择“Arduino UNO”,如图2所示
这意味着伺服电机移动多快(您可以调整数字)
这意味着伺服将向左或向右旋转多远。(您可以调整数字)
这意味着在 30 厘米或更短的距离处,机器人小车将倒车(您可以调整数字)
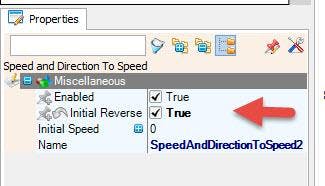
这将是机器人汽车的默认速度您可以将其设置为更小或设置为 1 以获得全速
这将反转启动方向,根据您的电机接线,您可以将其保留为 False
。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
