



王秀兰
分享资料个
为 Arduino IDE 添加“WIZnet WizFi360-EVB-PICO”支持
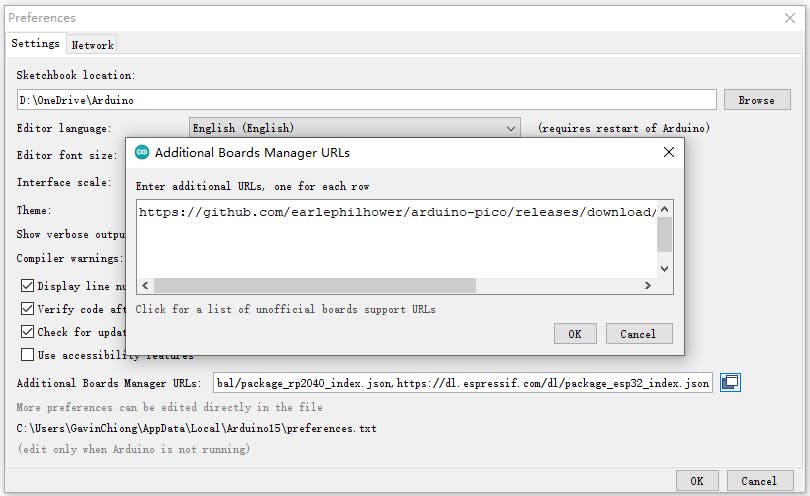
打开 Arduino IDE 并转到“文件”->“首选项”。
在弹出的对话框中,在“Additional Boards Manager URLs”字段中输入以下 URL:
https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
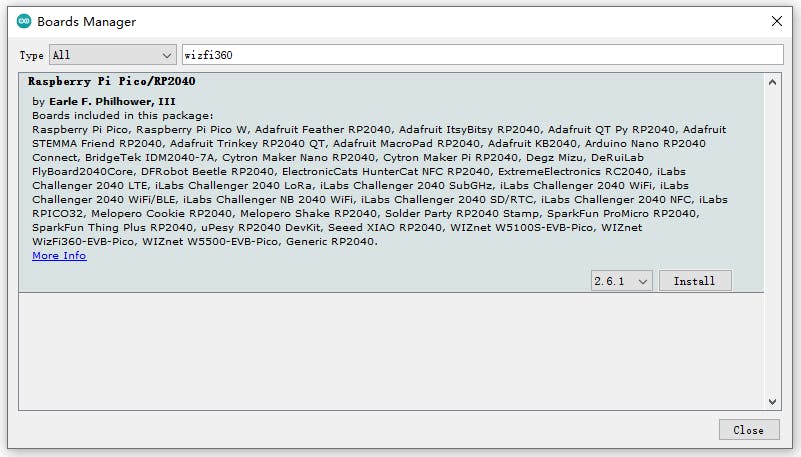
通过“Board Manager”搜索“WizFi360”并安装 Board 支持
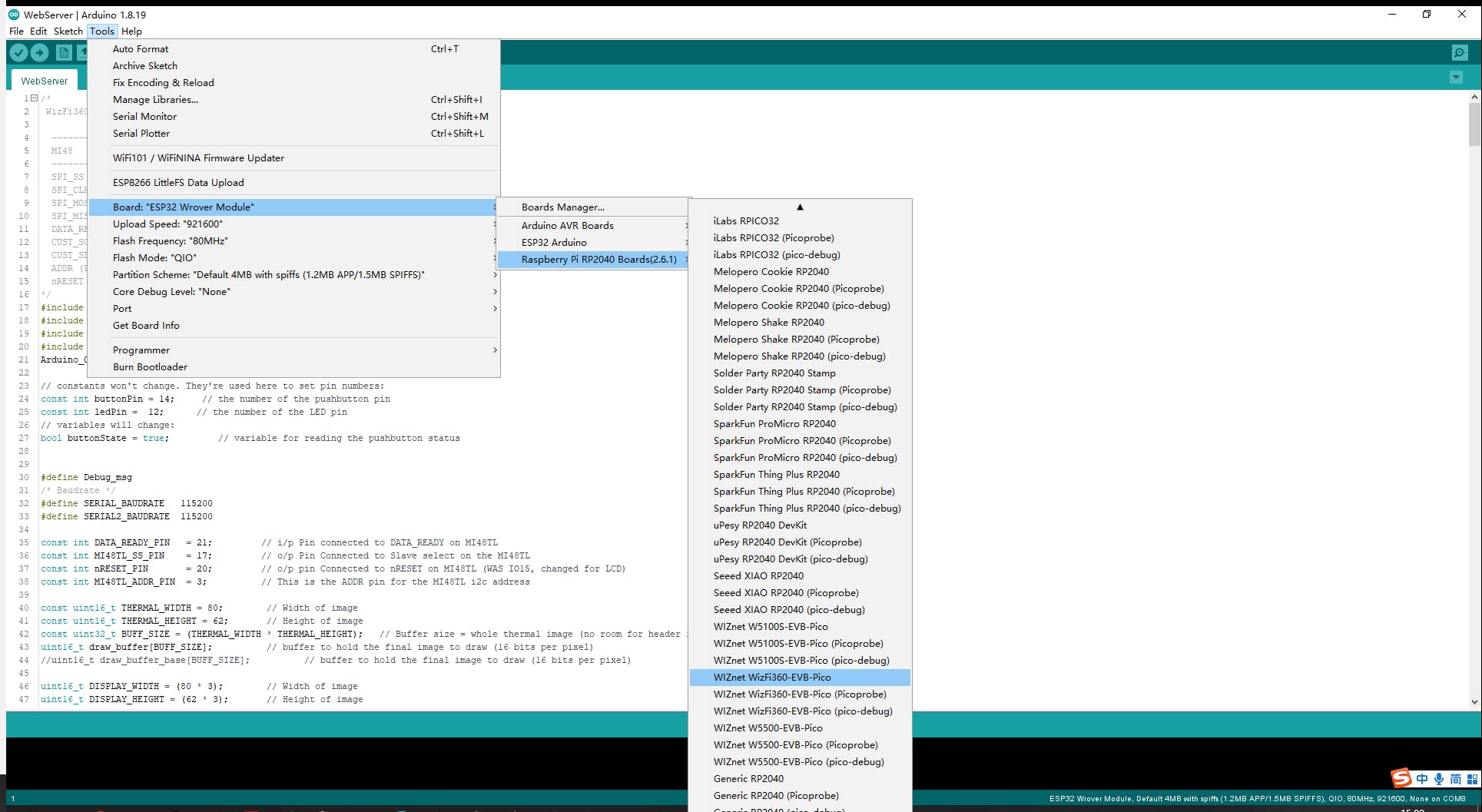
“工具->开发板:”***”-> Raspberry Pi RP2040 Boards(2.6.1)”选择“WIZnet WizFi360-EVB-PICO”。
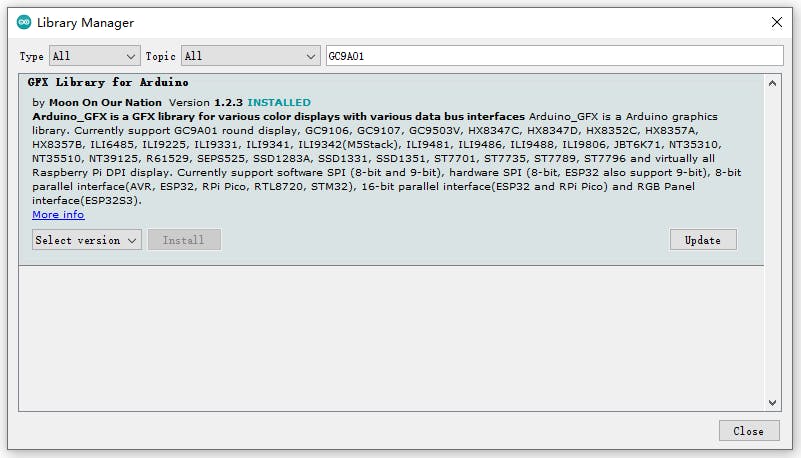
添加“GFX Library for rduino”,该库支持圆屏GC9A01。
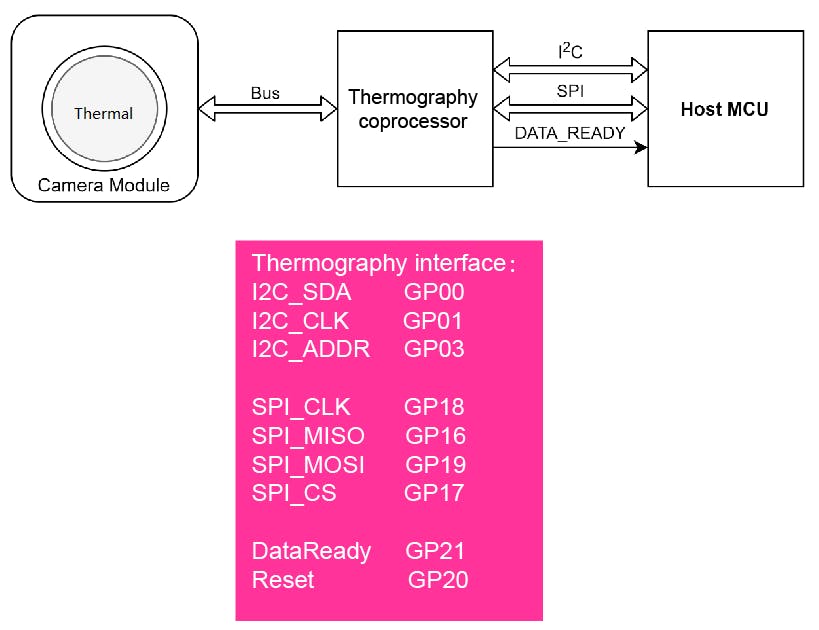
热成像相机和协处理器接口和功能引脚初始化
#include // i2c library (standard Arduino library)
#include // SPI library (standard Arduino library)
const int THERMAL_DATA_READY_PIN = 21; //Pin connected to DATA_READY
const int THERMAL_CS_PIN = 17; //Pin Connected to CS
const int THERMAL_nRESET_PIN = 20; //pin Connected to nRESET
const int THERMAL_ADDR_PIN = 3; //The Thermography i2c address
uint16_t THERMAL_Addr = 0x40;
/*i2c address for Thermography (0x40 if Thermography_ADDR_PIN =0 or 0x41 if Thermography_ADDR_PIN = 1 )*/
热像注册地址
// Now the addresses for each of the registers within the device
const uint16_t THERMAL_FRAME_MODE = 0xB1; // Frame Mode register address
const uint16_t THERMAL_SW_VERSION = 0xB2; // swVersion register address
const uint16_t THERMAL_BUILD = 0xB3; // swVersion build register address
const uint16_t THERMAL_FRAME_RATE = 0xB4; // Frame Rate register addres
const uint16_t THERMAL_POWER_DOWN = 0xB5; // Power down register address
const uint16_t THERMAL_STATUS_ERROR = 0xB6; // Status Error register address
const uint16_t THERMAL_SENSOR_TYPE = 0xBA; // SenXor type register address
const uint16_t THERMAL_EMISSIVITY = 0xCA; // emissivity register address
const uint16_t THERMAL_FILTER_CONTROL = 0xD0; // filter control (bits 0-2 R_W)
const uint16_t THERMAL_FILTER_SETTINGS_LSB = 0xD1; // filter setting LSB (0x32 default, 0x80 rec)
const uint16_t THERMAL_FILTER_SETTINGS_MSB = 0xD2; // filter setting MSB (0x00 default)
const uint16_t THERMAL_ROLLING_AVG_SETTING = 0xD3; // rolling average setting (0x04 default)
I2C读写Thermography寄存器地址
// =========================================================================
// Function to write i2c register
// =========================================================================
void WriteI2c(int RegAddr, unsigned char RegData)
{
Wire.beginTransmission(Addr); // Begin transmission to the Sensor
Wire.write (RegAddr); // Set the address for the requested register
Wire.write (RegData); // Write the data for that register
Wire.endTransmission(true); // Release i2c bus - so others can use it (can have multiple slaves & masters connected
return;
}
// =========================================================================
// Function to read i2c register
// =========================================================================
unsigned char ReadI2c(int RegAddr)
{
unsigned char Result;
Wire.beginTransmission(Addr); // Begin transmission to the Sensor
Wire.write (RegAddr); // Set the address for the requested register
Wire.endTransmission(); // End tranmission We should have set the address of the register
Wire.requestFrom(Addr, 1); // Tell slave we need to read 1 byte from the current register
Result = Wire.read(); // read that Serial Number byte (register will auto increment)
Wire.endTransmission(true); // Release i2c bus - so others can use it
return Result;
}
在“void setup()”中通过I2C BUS获取和设置参数
THERMAL_FILTER_CONTROL :将此位设置为 1 指示在连续捕获模式下运行,从而连续从相机模块获取数据并更新可通过 SPI 接口访问的读出缓冲区。将此位重置为 0 指示停止连续数据采集。这也会将 DATA_READY 引脚和 STATUS 寄存器的相应位 4 重置为 0。
THERMAL_FRAME_RATE :这些位的值确定主机控制器可以通过 SPI 接口从输出帧缓冲区读取热数据帧的速率。该值必须是一个无符号整数,表示所连接相机模块的最大帧速率 FPS_MAX 的帧速率除数:FPS = FPS_MAX / FRAME_RATE_DIVIDER。例外情况是 FRAME_RATE = 0,这会产生 FPS_MAX = 24FPS。
THERMAL_FRAME_MODE :将此位设置为 1 会消除通过 SPI 接口传输的热数据帧中的标头。将此位重置为 0 包括热数据帧中的 HEADER,
Wire.begin(); // Initialise and configure the i2C//
Wire.setClock(400000); // use 400 kHz I2C//
pinMode(THERMAL_DATA_READY_PIN, INPUT_PULLUP);
pinMode (nRESET_PIN, OUTPUT);
digitalWrite (nRESET_PIN, LOW); // First put the THERMAL in reset - THIS NEEDS TO BE TIMED//
pinMode (THERMAL_ADDR_PIN, OUTPUT);
digitalWrite (THERMAL_ADDR_PIN, LOW); // Set the THERMAL i2c addrees LOW = 0x40 HIGH = 0x41//
pinMode(THERMAL_CS_PIN, OUTPUT); // Configure CS pin for THERMAL
digitalWrite (THERMAL_CS_PIN, HIGH);
delay(200); // Wait 0.2 seconds //
digitalWrite (nRESET_PIN, HIGH); // remove reset to the THERMAL - allow it to boot//
delay(1000); // Wait 1 seconds for the THERMAL to boot
SPI.begin(); // Initialise the SPI
// =========================================================================
// Read all the individual i2c registers
// Uses ReadI2c() routine
// =========================================================================
frameMode = ReadI2c(THERMAL_FRAME_MODE);
swVersion = ReadI2c(THERMAL_SW_VERSION);
build = ReadI2c(THERMAL_BUILD);
frameRate = ReadI2c(THERMAL_FRAME_RATE);
powerDown = ReadI2c(THERMAL_POWER_DOWN);
statusError = ReadI2c(THERMAL_STATUS_ERROR);
senxorType = ReadI2c(THERMAL_SENSOR_TYPE);
emissivity = ReadI2c(THERMAL_EMISSIVITY);
// =========================================================================
// Write any registers required beofre starting exitig setup
// and starting Data aquisition
// =========================================================================
WriteI2c(THERMAL_FILTER_SETTINGS_LSB, 0x80);
WriteI2c(THERMAL_FILTER_SETTINGS_MSB, 0x00);
WriteI2c(THERMAL_FILTER_CONTROL, 0x02);
delay(100); // currently required after modifying filter values//
WriteI2c(THERMAL_FRAME_RATE, 0x3); // Write the Frame_rate register 0x1 = as fast as possible (24FPS)//
WriteI2c(THERMAL_FRAME_MODE, 0x3); // Write the Frame_mode register 0x3 = capture continuous with header)//
在“void loop()”中通过SPI BUS获取camera Header和data
SPI 时钟设置为 40MHz,来自传感器的数据相对于屏幕翻转,因此我们必须向后绘制行。
void Get_sensor_data()
{
dataReady = digitalRead(THERMAL_DATA_READY_PIN);
// Read the state on THERMAL_DATA_READY_PIN line
if ( digitalRead (THERMAL_DATA_READY_PIN) == HIGH) {
// Wait for THERMAL_DATA_READY_PIN to assert
Serial.println ("Data ready!!");
//THERMAL_DATA_READY_PIN has been asserted so data is now available on SPI bus
SPI.beginTransaction(SPISettings(40000000, MSBFIRST, SPI_MODE0));
digitalWrite (THERMAL_CS_PIN, LOW);
for (int i = 0; i < THERMAL_WIDTH; i++)
{
header_buffer[i] = SPI.transfer16(0x0);
// write data to the header buffer
}
for (int j = 0; j < THERMAL_HEIGHT; j++)
{
for (int i = 0; i < THERMAL_WIDTH; i++)
{
THERMAL_SpiData = SPI.transfer16(0x0);
// The data from the sensor is flipped with respect to the screen so we have to draw the rows backwards
draw_buffer[((THERMAL_WIDTH - 1) - i) + (j * THERMAL_WIDTH)] = THERMAL_SpiData;
} // (finished a row)
}
// We have now read the entire frame of data
digitalWrite (THERMAL_CS_PIN, HIGH);
SPI.endTransaction();
}
}
#include
Arduino_GFX *tft = create_default_Arduino_GFX();
在“libraries\GFX_Library_for_Arduino\src\Arduino_GFX_Library.h”中定义 GC9A01 使用的引脚
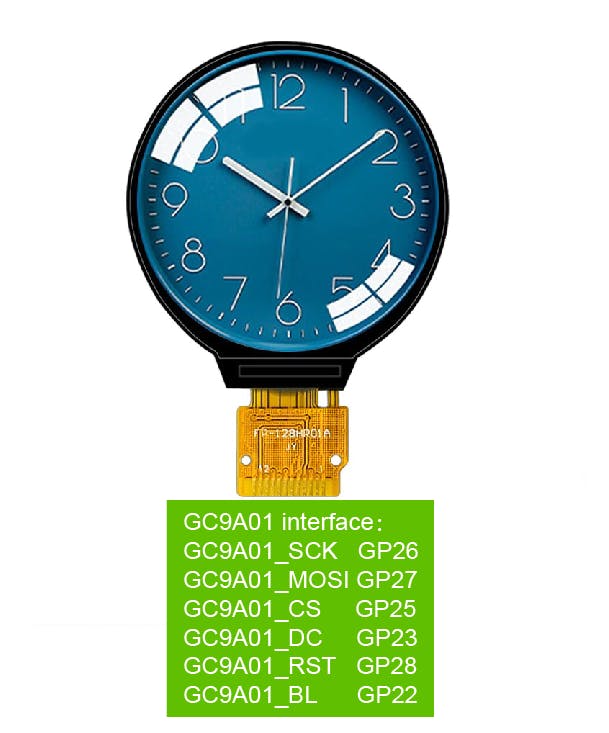
#elif defined(ARDUINO_RASPBERRY_PI_PICO)||defined(ARDUINO_WIZNET_WIZFI360_EVB_PICO)||defined(ARDUINO_WIZNET_5100S_EVB_PICO)
#define DF_GFX_SCK 26
#define DF_GFX_MOSI 27
#define DF_GFX_MISO GFX_NOT_DEFINED
#define DF_GFX_CS 25
#define DF_GFX_DC 23
#define DF_GFX_RST 28
#define DF_GFX_BL 22
在“void setup()”中初始化屏幕并打开屏幕的背光
tft->begin();
tft->fillScreen(BLACK);
pinMode(22, OUTPUT);
digitalWrite(22, HIGH);
Display_Begin();
将热数据的每一个像素点转化为颜色(RGB565),通过根据minmax中温度值的相对位置(thermal Header中识别范围内的温度差)在colormap中找到对应的颜色信息。
通过“DISPLAY_buffer”函数显示所有温度颜色信息。由于摄像头分辨率只有80*62,而GC9A01的屏幕分辨率为240*240,所以每个温度点扩展为3*3显示。
// =========================================================================
// Colour conversion - one pixel at a time
// The draw_buffer starts as 16 bit sensor data
// At the end it is 16 bit RGB (5-6-5)
// =========================================================================
for (int j = 0; j < THERMAL_HEIGHT; j++) {
for (int i = 0; i < THERMAL_WIDTH; i++) {
pixelVal = draw_buffer[(i) + (j * THERMAL_WIDTH)];
if (pixelVal <= THERMAL_MinVal) {
lutIndex = 0;
}
else if (pixelVal >= THERMAL_MaxVal) {
lutIndex = 255;
}
else {
lutIndex = map (pixelVal, THERMAL_MinVal, THERMAL_MaxVal , 0, 0xff);
}
for(int m = 0; m<3; m++)
{
DISPLAY_buffer[(i*3)+m + (j*3) * DISPLAY_WIDTH]= palette[lutIndex];
DISPLAY_buffer[(i*3)+m + ((j*3)+1) * DISPLAY_WIDTH]= palette[lutIndex];
DISPLAY_buffer[(i*3)+m + ((j*3)+2) * DISPLAY_WIDTH]= palette[lutIndex];
}
}
}
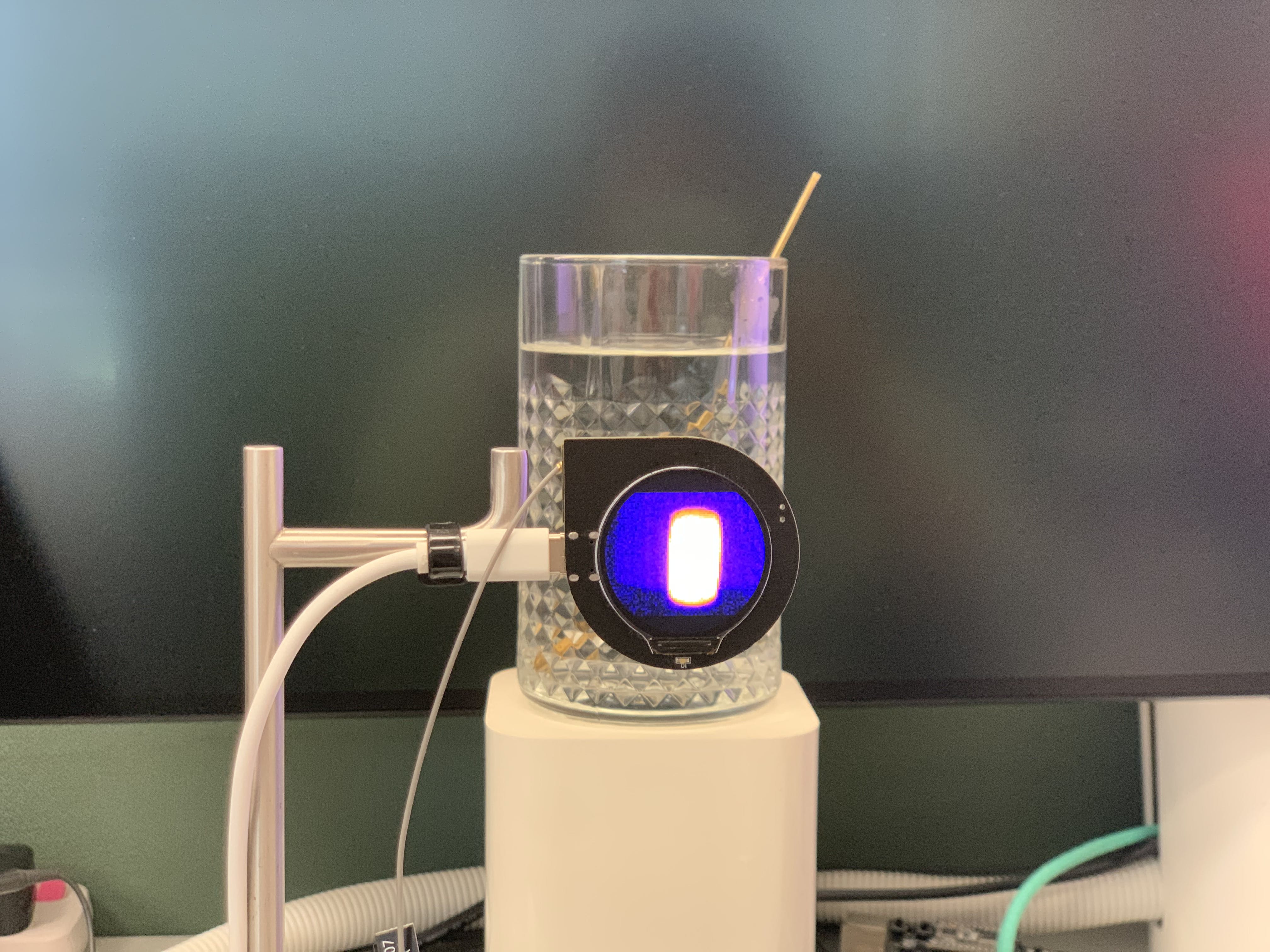
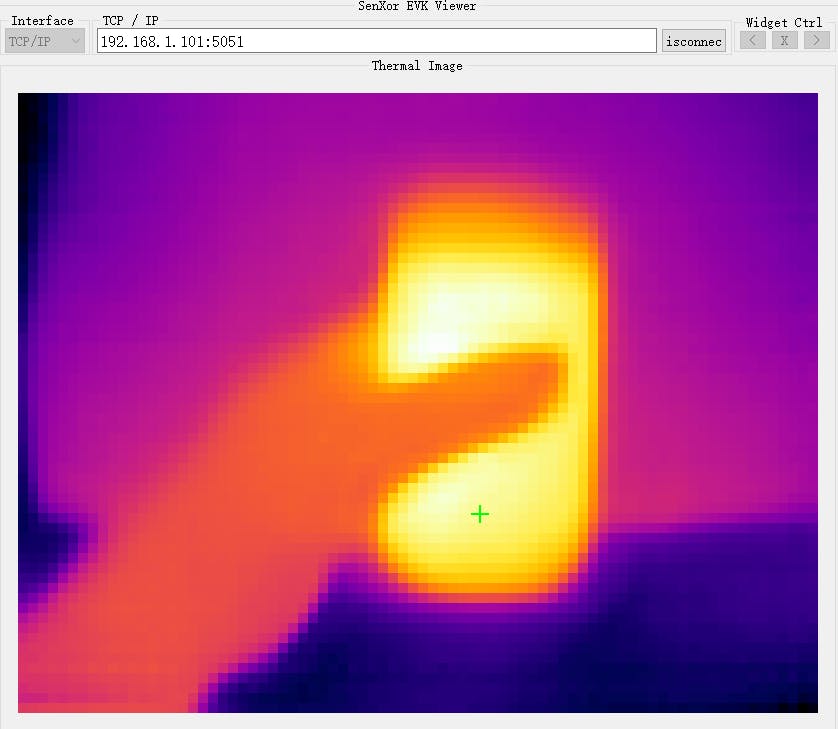
然后我们得到了这个项目中的第一张热水热成像图。
Thermal Viewer 软件作为 TCP 客户端使用端口 5051。
#include "WizFi360.h"
// Wi-Fi info //
char ssid[] = "WIZNET_test"; // your network SSID (name)//
char pass[] = "********"; // your network password//
int status = WL_IDLE_STATUS; // the Wifi radio's status//
WiFiServer server(5051);

初始化WizFi360模块的串口,修改波特率为2000000bps(wizfi360的最大波特率)。
第一次初始化为115200,然后在WiZfi360库的初始化部分加入设置波特率(2000000),第二次改为2000000bps。
// initialize serial port for WizFi360 module//
#if defined(ARDUINO_WIZNET_WIZFI360_EVB_PICO)
Serial2.begin(2000000);
WiFi.init(&Serial2);
Serial2.begin(2000000);
#endif
在“void setup()”中查看wifi的wizfi360 Link状态
// check for the presence of the shield//
if (WiFi.status() == WL_NO_SHIELD) {
Serial.println("WiFi shield not present");
// don't continue//
while (true);
}
// attempt to connect to WiFi network//
while ( status != WL_CONNECTED) {
Serial.print("Attempting to connect to WPA SSID: ");
Serial.println(ssid);
// Connect to WPA/WPA2 network//
status = WiFi.begin(ssid, pass);
}
Serial.println("You're connected to the network");
当热查看器软件连接到此服务器(WizFi360)时,RP2040 读取热数据“Get_sensor_data()”并将数据发布到 TCP 客户端(热查看器软件)。
先传热像头,再传热像素数据(80*62 16bits)。
WiFiClient client;
if (client) {
Serial.println("Connected");
socket_status = client.connected();
socket_status_cnt = 0;
delay(1000);
uint8_t i;
while (socket_status&&!buttonState)
{
switch(socket_send_status)
{
case 0:
{
Get_sensor_data();
socket_send_result = client.write((uint8_t*)header_buffer,160);
socket_send_status = 1;
}break;
case 1:
{
if(socket_send_result == 160 ){
socket_sendnum = 9920; //80*62*2//
socket_send_status = 2;
i=0;
}else if(socket_send_result == 0){
socket_send_status = 4;
}
}break;
case 2:
{
if(socket_sendnum >=2048)
{
socket_send_result = client.write((uint8_t*)(draw_buffer+(i*1024)),2048);
}
else
{
socket_send_result = client.write((uint8_t*)(draw_buffer+(i*1024)),socket_sendnum);
}
socket_send_status = 3;
}break;
case 3:
{
if(socket_sendnum >= 2048)
{
if(socket_send_result == 2048)
{
socket_sendnum -= 2048;
i++;
socket_send_status = 2;
}else if(socket_send_result == 0){
socket_send_status = 4;
}
}
else
{
if(socket_send_result == socket_sendnum)
{
socket_sendnum = 0;
socket_send_status = 4;
}
}
}break;
case 4:
{
socket_status_cnt ++;
if(socket_status_cnt == 20)
{
socket_status = client.connected();
if(socket_status == 0)
{
client.stop();
}
socket_status_cnt = 0;
}
socket_send_status = 0;
}break;
}
}
}
Thermal viewer 软件接收像素数据,它可以显示和显示这些像素的最高温度。
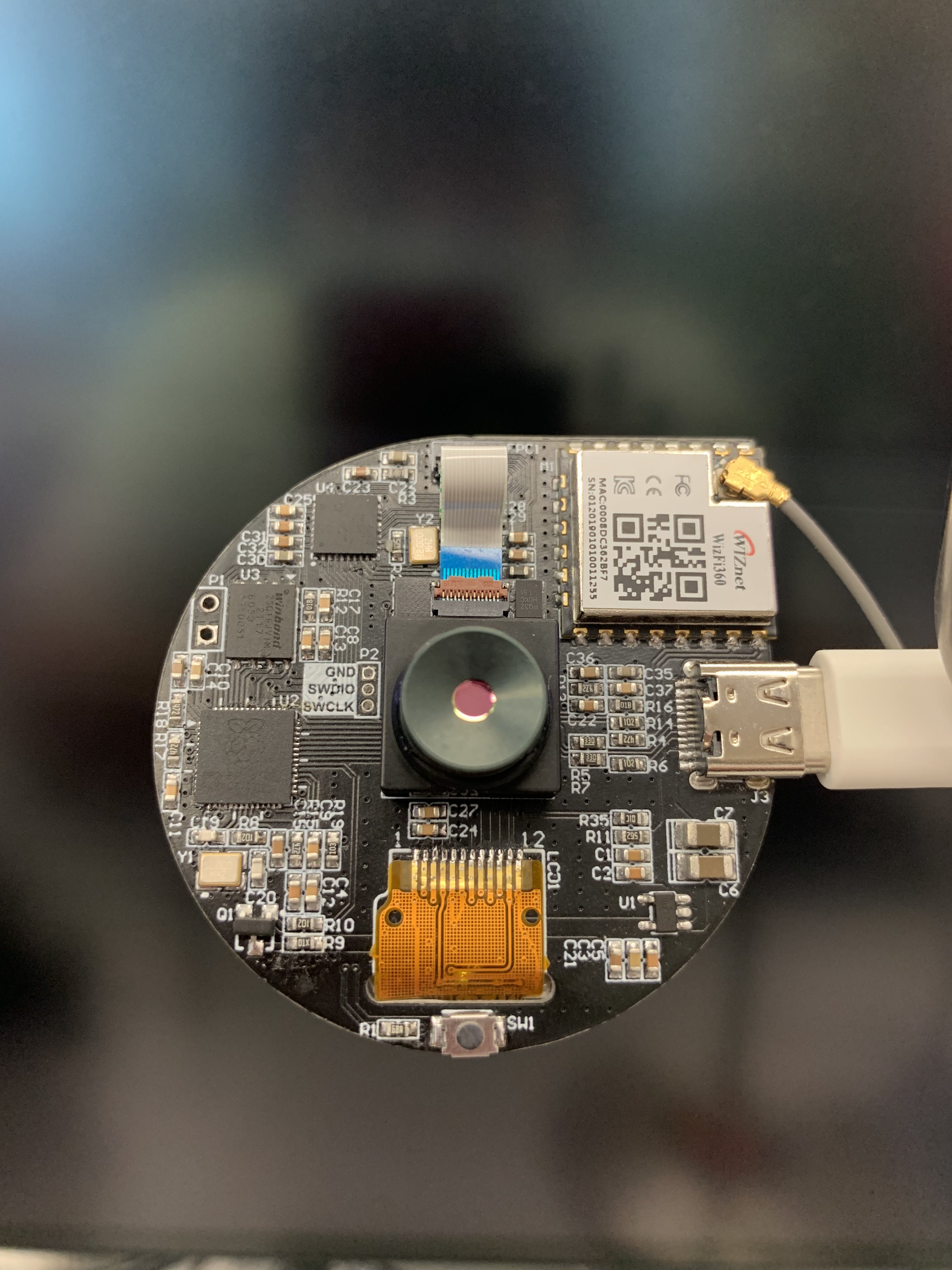
硬件如下图
结束。
注意:由于签署了保密协议,一些细节不能公开。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
